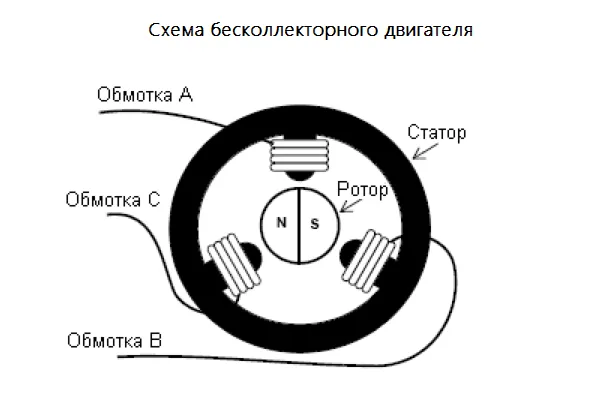
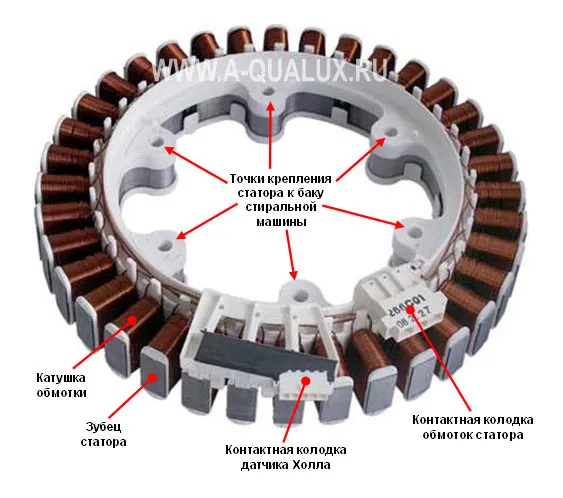
Для контроля положения ротора используется датчик на эффекте Холла. Датчик реагирует на магнитное поле и поэтому крепится к статору таким образом, чтобы магниты ротора воздействовали на него.
Чертежи бесколлекторного двигателя своими руками
Общее устройство (Inrunner, Outrunner)
Схема с пусковым устройством обычно используется для высокоскоростных двигателей с небольшим числом полюсов. Outrunner, когда требуется двигатель с высоким крутящим моментом и относительно низкой скоростью. Вентиляторы проще, поскольку в качестве корпуса можно использовать неподвижный статор. На него можно установить навесное оборудование. При использовании аутригеров вращается вся внешняя часть. Двигатель крепится к неподвижному валу или к частям статора.
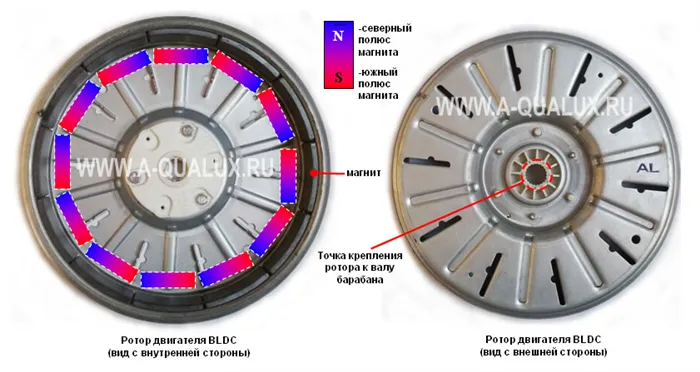
Магниты и полюса
Количество магнитов не всегда соответствует количеству полюсов. Многие магниты могут образовывать один полюс:
В этом случае 8 магнитов образуют 4 полюса. Размер магнитов зависит от геометрии двигателя и его характеристик. Чем сильнее используемые магниты, тем больше крутящий момент, развиваемый двигателем на валу.
Магниты крепятся к ротору с помощью специального клея. Реже встречаются конструкции с магнитным основанием. Материал ротора может быть магнитопроводящим (сталь), немагнитопроводящим (алюминиевые сплавы, пластмассы и т.д.) или их комбинацией.
Обмотки и зубья
Число зубцов статора должно быть разделено на число фаз, т.е. для трехфазного бесщеточного двигателя число зубцов статора должно быть разделено на 3. Число зубцов статора может быть больше или меньше числа полюсов ротора. Например, существуют двигатели со схемой: 9 зубьев/12 магнитов, 51 зуб/46 магнитов.
Двигатели с 3-зубым статором используются редко. Поскольку одновременно работают только две фазы (астромотор), магнитные силы на роторе действуют неравномерно по всей окружности (см. рисунок).
Силы, действующие на ротор, пытаются деформировать его, что приводит к увеличению вибраций. Для противодействия этому эффекту статор должен иметь большое количество зубцов, а обмотка должна быть распределена как можно более равномерно по зубцам по всей окружности статора.
Таким образом, магнитные силы, действующие на ротор, компенсируют друг друга. Нет никакого дисбаланса.
Варианты распределения обмоток фаз по зубьям статора
9-зубая версия обмотки
12-зубая версия обмотки
Числа зубцов, приведенные на диаграммах выше, выбраны таким образом, чтобы они не делились на 3. Например, при 36 зубьях на каждую фазу приходится 12 зубьев. 12 зубов могут быть распределены следующим образом:
6 групп по 2 зуба
4 группы по 3 зуба
Устройство БК — моторов
Двигатель без коммутатора состоит из ротора с магнитами и статора с обмотками. В соответствии с расположением этих элементов двигатель делится на входные и выходные цепи.
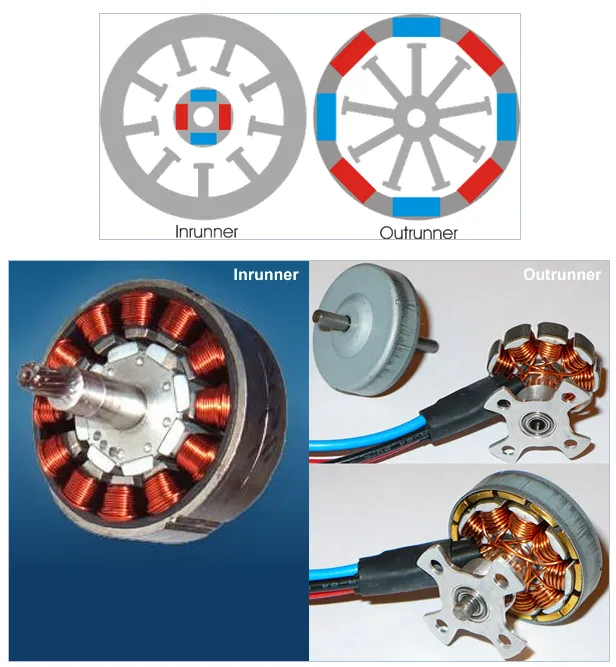
В мультироторных системах чаще всего используется схема с внешним ротором, так как она обеспечивает наибольший крутящий момент.
Самодельный ЧПУ станок
Разделы сайта
- Самодельный ЧПУ станок
- 3D принтер
- Чертежи 3D принтеров
- Чертежи ЧПУ станков
- 3D модели
- Механика
- Электроника
- Книги по ЧПУ
- Софт для ЧПУ станка
- Обзоры
- Видео
- Лазерные граверы
Интересное предложение

Лучшее
- Домашний 3D принтер
- Простой контроллер для ЧПУ станка
- Самодельный ЧПУ станок моделиста
- Чертеж самодельного ЧПУ станка
- Самодельный ЧПУ станок из МДФ
Статистика
Обычно в качестве шпинделя для самодельного станка с ЧПУ используется Dremel или его китайские аналоги.
Однако такие фрезерные станки быстро приходят в негодность, так как обычно имеют только один упорный подшипник и не рассчитаны на большие и длительные боковые нагрузки. А для фрезерного станка с ЧПУ такие нагрузки являются обычным явлением, поскольку все фрезерные работы выполняются с боковыми нагрузками.
В покупных шпинделях для фрезерных станков используются двигатели с коммутаторами. Однако двигатели с коммутатором хорошо работают только на высоких скоростях и имеют низкую мощность на низких скоростях.
Все это можно изменить, установив двигатель без коммутатора!
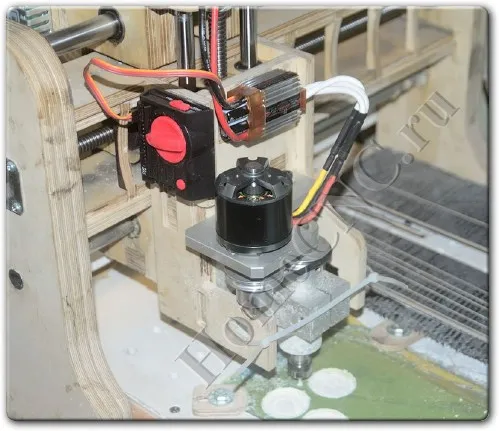
На фото выше показан самодельный фрезерный станок с ЧПУ, который я собрал своими руками. Я построил недорогой фрезерный станок с ЧПУ для одного моделиста, смотрите статью, там есть чертежи станка с ЧПУ и рекомендации по сборке.
Итак, для изготовления самодельного корпуса для станка с ЧПУ вам понадобятся:
Однако можно использовать и самый дешевый сервопривод, задача которого — регулировать скорость вращения двигателя, поэтому его использование зависит только от эстетического вкуса и удобства монтажа сервопривода на станке с ЧПУ.
На станке с ЧПУ это выглядит примерно так.
Как видите, нагрузка на вал двигателя не передается, вы можете управлять фрезой как угодно, но двигатель остается неповрежденным.
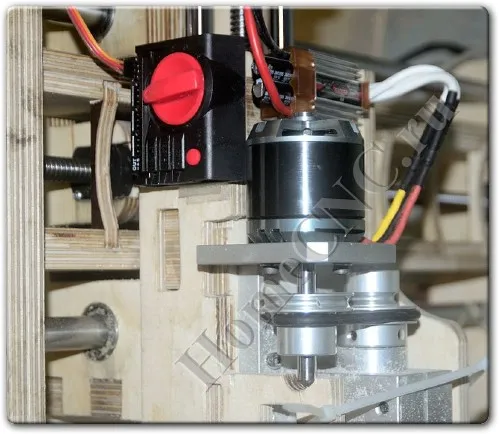
Но длинный шпиндель также позволяет закрепить фрезу непосредственно на шпинделе двигателя с помощью зажима. Два подшипника установлены на валу двигателя и прикреплены к оси Z с помощью кронштейна, а сам двигатель также имеет 2 встроенных подшипника и монтажные отверстия. Такая конструкция легко выдерживает боковые нагрузки, возникающие при фрезеровании заготовки.
Шпиндель очень мощный, 2000 Вт! Легко разгрызает фанеру толщиной 8 мм за два прохода при подаче 800, кевлар толщиной до 8 мм может быть разрезан кукурузной фрезой 1,5 мм при подаче 200, при более высокой подаче фреза ломается. Легко обрабатывает алюминиевые и акриловые детали.
Я видел такой станок, делающий тарелки из березы, сувенир, конечно, не марки Risoli, но тарелки для украшения стен или буфетов (после покраски и обточки) — просто загляденье!
Я должен добавить, что контроллер имеет встроенную способность поддерживать скорость независимо от нагрузки, что очень полезно для финишной обработки.
Эта модификация позволяет недорого модернизировать самодельный станок с ЧПУ. Скорость можно регулировать с помощью сервотеста, а скорость двигателя автоматически удерживается контроллером. Качество улучшается на порядок.
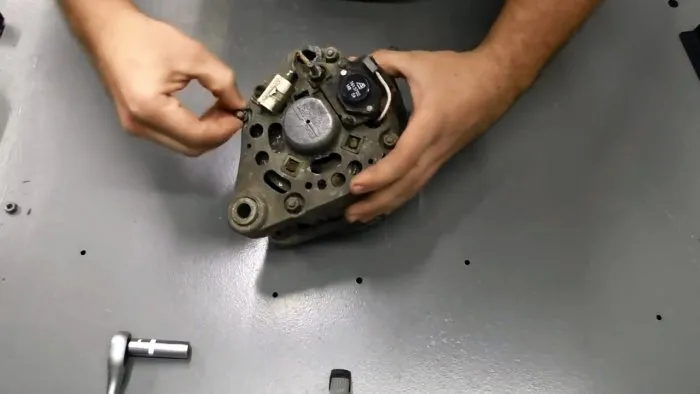
Как сделать мощный мотор из автомобильного генератора
У меня был старый, но рабочий генератор переменного тока. Я решил преобразовать его в двигатель BLDC. Позже я буду использовать его для самостоятельной постройки электровелосипеда или электроскутера. В целом, двигатель подходит для тех случаев, когда необходим управляемый электропривод.

Используемые материалы
- автомобильный генератор;
- припой;
- провода медные;
- АКБ;
- плата управления с регулятором оборотов.
Мы снимаем генератор с автомобиля и разбираем его.

Сначала ослабьте гайки, крепящие заднюю крышку и подшипник.




Открутите соединения катушки статора от блока диодов выпрямителя.


Открутите кронштейны диодного моста и снимите их.

Очистите провода. Подключите обмотку статора в виде треугольника.

Возьмите снятый щеточный узел. Устройство оснащено регулятором напряжения. Связь должна быть разорвана.

Припаяйте провода к щеткам в обход регулятора напряжения.

Соберите двигатель в обратном порядке. Замените подшипники и при необходимости отшлифуйте контактные кольца.
Конструкция
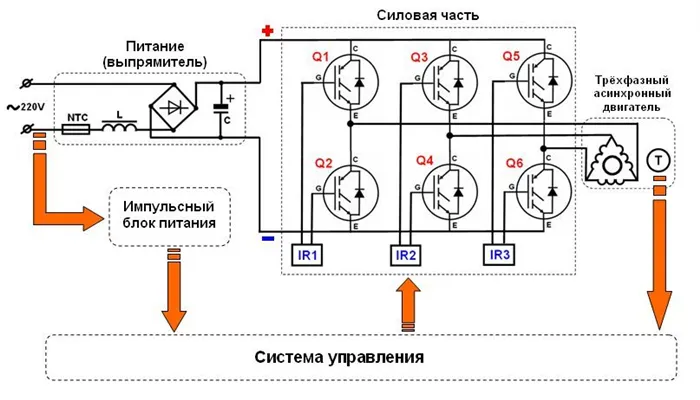
Двигатель приводного клапана (каталог Interskol, Lenze, Borets для ESP, ESP) состоит из датчиков, которые показывают положение ротора синхронного двигателя. Совокупность этих механизмов называется электромеханической частью двигателя. Управляющая часть устройства включает в себя микроконтроллер и силовой мост. Блок управления двигателем относится к неструктурной части системы.
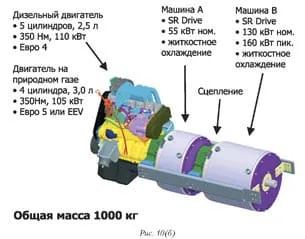
Фото — Асинхронный двигатель с клапаном
Механическая часть устройства состоит из синхронного двигателя, состоящего из изолированных стальных листов. Такая конструкция помогает уменьшить двойные токи, возникающие в обмотке и роторе.
Датчики Холла используются для нормальной работы устройства. Если двигатель клапана не имеет индикаторных устройств, сигналы передаются непосредственно на электромагнитную систему. Эти же устройства управляют функцией реверса. Это гарантирует, что двигатель не остановится во время погружения, а также позволяет управлять работой и настройками дистанционно. Эта функция необходима в нефтяной, угольной, газовой и буровой промышленности.
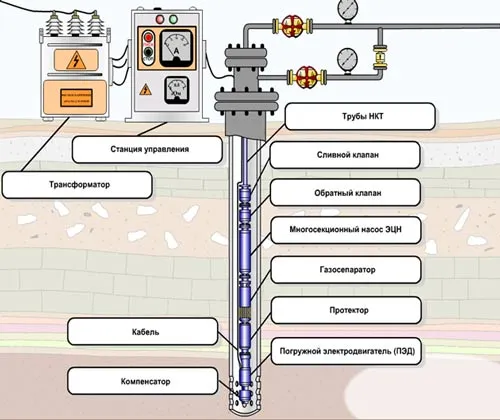
Фото — Принцип работы погружного электродвигателя
Микропроцессор шагового процессора обрабатывает все данные о положении ротора, в соответствии с настройками которого осуществляется управление ШИМ-сигналами. Следует отметить, что если эти сигналы низкие, их необходимо усилить. Для этого используются специальные устройства, основанные на принципе микротрансформаторов.
| Марка, тип | Крутящий момент, Нм | Длина, мм | Максимально допустимая частота, мин-1 | Вес, кг |
| ДМВ 55 | 0,05; 1 | 61 | 420; 1800 | 0,4 |
| 5 ДВМ 55 | 0,23; 0,47; 0,7; 1,3 | 218 | 2000; 3000; 4000; 6000 | 4,5 |
| 5 ДВМ 155 | 2,3; 3,5; 4,7; 7 | 342 | 2000; 3000; 4000; 6000 | 13 |
| 5 ДВМ 165 | 10; 13; 17; 23 | 536 | 1000; 2000; 3000; 4000 | 67 |
| 5 ДВМ 215 | 23; 35; 47; 70 | 637 | 1000; 2000; 3000; 4000 | 28 |
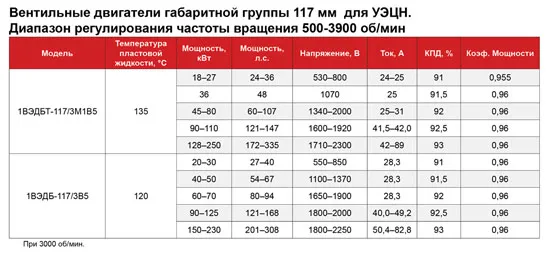
Рисунок — Параметры двигателей с постоянными магнитами
Двигатели рассчитываются по следующим формулам:
Формула фазового равновесия: IRS+ ES= U
Сумма СЭМ — E1= Emsin(∂+∂0), Амплитуда СЭМ — Em= ko1pFw1Ω = (ko1pFN1Ω) / 2.
Определение угла переключения двигателя:
Виды устройства
Двигатели клапанов могут работать на переменном или постоянном токе. Кроме того, их принято делить на следующие типы:
- Однофазное устройство. Это простейшие вентильные двигатели с наименьшим количеством связей между машиной и электроникой. К числу недостатков однофазных устройств следует отнести: пульсации, высокий крутящий момент, а также невозможность запуска на всех угловых положениях. Однофазные двигатели нашли широкое применение в машинах, где требуется высокая скорость.
- Двухфазный двигатель. Этот мотор при работе активизирует воздушный зазор либо, при дополнительной настройке, создает асимметрию в полюсах ротора. Это устройство устанавливается в машинах, где критична связь статора с обмоткой. К числу недостатков следует отнести высокий крутящий момент и пульсации, которые могут привести к пагубным последствиям.
- Трехфазный двигатель. Этот дисковый двигатель используется для запуска и создания крутящего момента, не используя при этом большого количества фаз. Данный тип двигателей используется в различных отраслях производства, а иногда и в бытовых условиях. Это самая популярная конструкция из всех представленных. Альтернативные 3-фазные машины с четным числом полюсов являются лучшим решением для приборов, где необходимо сочетание высокой мощности и низкой скорости, например, в насосах. Недостатки трехфазных двигателей: высокий крутящий моментом и повышенный уровень шума.
- Устройства с четырьмя фазами. У этих двигателей существенно снижен крутящий момент и пульсации, но сфера применения устройств ограничена высокой стоимостью и большой мощностью.
К сожалению, самостоятельно спроектировать и построить работающий подводный или многофазный вентильный двигатель практически невозможно; гораздо проще купить подходящую модель. В разных городах России и Украины цены на вентильные двигатели могут значительно отличаться. Нижний предел — около 8000 рублей, верхний — до 20 000 рублей, в зависимости от применения и производителя.
Вентильные двигатели используются во многих областях производства, например, в нефтяных скважинах, буровых установках, двигателях, системах воздушного охлаждения на химических заводах.
Виды электродвигателей
Существуют следующие типы двигателей постоянного тока:
- с возбуждением при помощи постоянных магнитов;
- с последовательным соединением якоря и обмоток возбуждения;
- с параллельным соединением якоря и обмоток возбуждения;
- со смешанным соединением якоря и обмоток возбуждения;
- вентильный двигатель (бесколлекторный двигатель постоянного тока), выполненный при помощи замкнутой системы; в таком типе двигателя используется инвертор (силовой полупроводниковый преобразователь), преобразователь координат и ДПР (датчик положения ротора).
Двигатель переменного тока — это электродвигатель, работающий на переменном токе. Существуют следующие типы двигателей переменного тока:
- гистерезисный двигатель;
- вентильный реактивный двигатель;
- асинхронный электродвигатель с частотой вращения ротора, отличающейся от частоты вращения создаваемого напряжением магнитного поля;
- синхронный электродвигатель с частотой вращения ротора, совпадающей с частотой вращения создаваемого напряжением магнитного поля.
Имеется также двигатель переменного тока (универсальный коллекторный двигатель) с режимами работы переменного и постоянного тока.
Другим типом двигателя является шаговый двигатель с ограниченным числом положений ротора. Фиксированное положение ротора определяется подачей тока в соответствующие обмотки. Когда напряжение питания снимается с одной обмотки и передается на другие обмотки, происходит переход в другое положение.
При питании от сети двигатель переменного тока обычно не может совершать более трех тысяч оборотов в минуту. Поэтому, когда требуются более высокие скорости, используется двигатель с коммутатором, дополнительным преимуществом которого является легкость и компактность при сохранении необходимой мощности.
Иногда также используется специальный зубчатый механизм, называемый мультипликатором, который подгоняет кинематические параметры устройства под требуемые технические параметры. Поскольку коммутаторы иногда занимают половину площади всего двигателя, двигатели переменного тока делаются меньше и легче за счет использования преобразователя частоты, а иногда и за счет наличия сети с повышенной частотой до 400 Гц.
Срок службы трехфазного асинхронного двигателя намного больше, чем у двигателя с коммутатором. Это определяется состоянием изоляции обмотки и подшипников. С другой стороны, синхронный двигатель, использующий инвертор и датчик положения ротора, считается электронным эквивалентом обычного двигателя с коммутатором, который поддерживает работу на постоянном токе.
Технические параметры контроллера
- Подключается щеточный и бесщеточный двигатель постоянного тока с непрерывной нагрузкой до 300 Вт.
- Номинальное входное напряжение 8–40 В (оптимизировано для 24 В).
- Средний ток двигателя 30 А ограничен из-за печатной платы (сама IFX007T может 55 А).
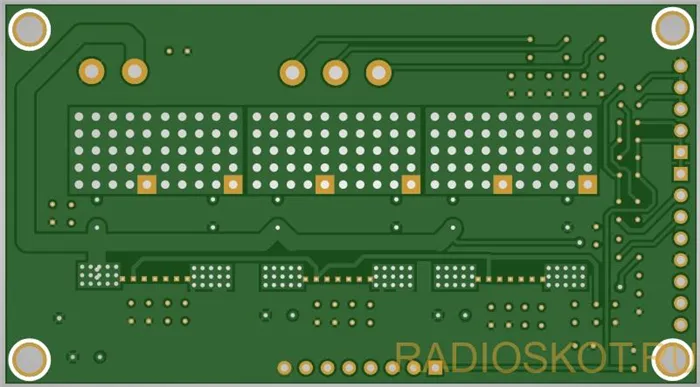
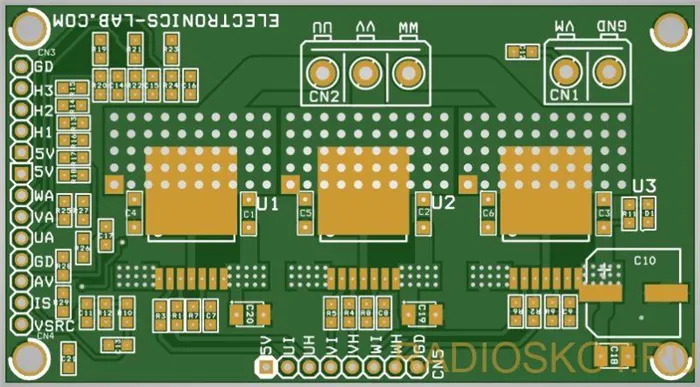
- Размеры печатной платы 81 x 45 мм
Устройство может использоваться для привода двигателей в различных промышленных приложениях: Электроинструменты, медицинские, роботы, насосы, мультирезки, ховеры, промышленная автоматизация.
Описание чипа IFX007T
IFX007T — это интегрированный сильноточный полумост для электроприводов. Он относится к семейству NovalithIC для промышленного и универсального применения и содержит p-канальный МОП-транзистор верхнего плеча и n-канальный МОП-транзистор нижнего плеча, а также интегрированную микросхему драйвера в одном корпусе.
p-канальный переключатель верхнего плеча устраняет необходимость в зарядовом насосе, сводя к минимуму электромагнитные помехи.
Интерфейс с микроконтроллером облегчается встроенной микросхемой драйвера, которая имеет входы логического уровня, диагностику измерения тока, управление скоростью хода, генерацию мертвого времени и защиту от перегрева, пониженного напряжения, перегрузки по току и короткого замыкания. IFX007T представляет собой экономичное решение для защищенных сильноточных ШИМ-приводов двигателей.

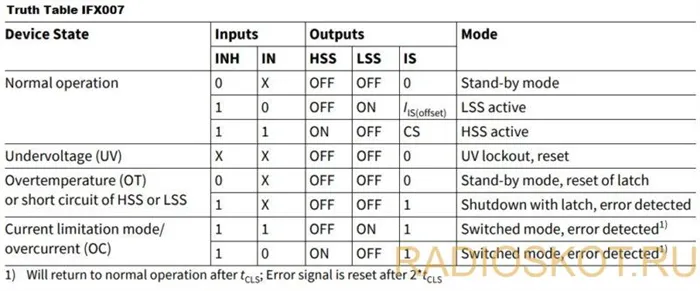
Устройство имеет встроенную функцию защиты выходов от короткого замыкания. Управляющие входы IN и INH состоят из TTL/CMOS-совместимых триггеров Шмитта с гистерезисом, которые управляют встроенными драйверами затворов МОП-транзисторов. Установка высокого уровня на клемме INH включает устройство. В этом состоянии активируется один из двух автоматических выключателей в зависимости от состояния клеммы IN. Чтобы выключить оба выключателя, клемма INH должна быть установлена в положение «низкий уровень». Внешний драйвер не требуется. IFX007T может быть подключен непосредственно к микроконтроллеру.

Для мостовых схем убедитесь, что MOSFET верхнего и нижнего плеч не гонят ток одновременно, подключив напряжение батареи непосредственно к GND. Об этом заботится схема в микросхеме драйвера, которая создает так называемое мертвое время между деактивацией одного MOSFET и активацией другого. Время, генерируемое микросхемой драйвера, автоматически подстраивается под выбранную скорость нарастания (регулируется с помощью внешних резисторов R7, R8, R9).
Выход SR Slew Rate позволяет пользователю оптимизировать баланс между мощностью передачи и поглощения в собственном устройстве путем подключения внешнего резистора RSR к GND.
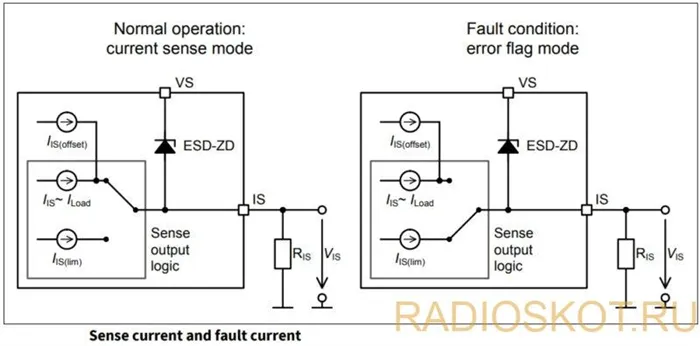
Контакт IS используется как комбинированный выход датчика тока и флага ошибки. В нормальном режиме работы (режим определения тока) источник тока подключен к контакту состояния, который обеспечивает ток, пропорциональный прямому току нагрузки, протекающему через активный выключатель верхнего плеча.
Некоторые термины, используемые в тематике BLDC и ESC
Если вы изучаете работу двигателей BLDC и контроллеров ESC, вы можете столкнуться с некоторыми терминами, используемыми в этом контексте. Ниже приводится краткий обзор некоторых наиболее важных терминов.
Торможение — определяет, как быстро двигатель BLDC может остановить вращение. Это особенно важно для летающих транспортных средств (дронов, вертолетов и т.д.), поскольку для маневрирования в воздухе им необходимо часто менять количество оборотов двигателя в минуту.
Плавный запуск — эта характеристика особенно важна для двигателей BLDC, когда крутящий момент передается от двигателя к исполнительному механизму (колесу, пропеллеру и т.д.) через систему передач, обычно состоящую из шестеренок. Плавный пуск означает, что двигатель не запускается сразу на максимальной скорости, а увеличивает скорость постепенно, независимо от скорости развития исполнительного усилия. Плавный запуск значительно снижает износ шестерен в трансмиссии.
Обычно направление вращения двигателей BLDC не меняется во время работы. Однако в процессе сборки и тестирования изделия может возникнуть необходимость изменить направление вращения двигателя, что обычно можно сделать, просто переподключив два кабеля двигателя.
Обычной практикой является калибровка двигателей BLDC таким образом, чтобы скорость была постоянной для одной и той же операции. Однако этого трудно добиться, поскольку напряжение питания от батареи со временем снижается. Чтобы избежать этого, контроллеры ESC обычно программируются на остановку двигателя BLDC, когда напряжение батареи падает ниже определенного порога. Эта функция особенно полезна, когда двигатели BLDC используются в беспилотных летательных аппаратах.
Время реакции (время реакции, время реакции, время реакции). Означает способность двигателя быстро изменять свою скорость при изменении энергии управления. Чем меньше время реакции, тем лучше управление двигателем.
Эта проблема является «ахиллесовой пятой» двигателей BLDC. Все двигатели BLDC имеют по крайней мере один небольшой подобный недостаток. Эта проблема вызвана тем, что когда на катушку статора подается напряжение, ротор движется вперед, поскольку на нем находится постоянный магнит. И когда управляющее напряжение снимается с этой катушки (чтобы подать ток на следующую катушку), ротор движется вперед немного больше, чем указывает логика работы двигателя. Это нежелательное опережение двигателя называется в англоязычной литературе «advance» и может вызывать нежелательную вибрацию, нагрев и шум во время работы двигателя. Поэтому хорошие контроллеры ESC стараются максимально устранить этот эффект при работе двигателей BLDC.
Работа схемы
Принципиальная схема двигателя BLDC и контроллера ESC на плате Arduino показана на следующем рисунке.
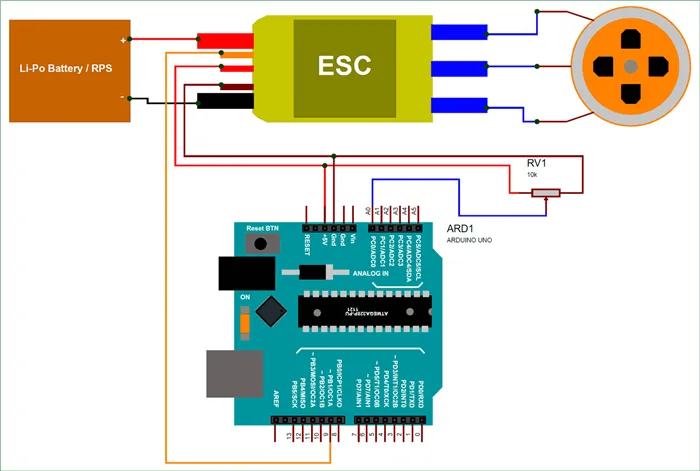
Как видите, схема довольно проста. Контроллеру ESC необходим источник питания 12 В с током не менее 5 А. Для питания схемы можно использовать адаптер или Li-Po аккумулятор. Три фазы (провода) двигателя BLDC должны быть подключены к трем выходным проводам контроллера ESC — независимо от порядка.
Внимание: Некоторые контроллеры не имеют выходных проводов, поэтому вам нужно будет припаять провода от двигателя BLDC к контактам контроллера. Обязательно изолируйте эти паяные соединения изоляционной лентой, так как по этим проводам может протекать довольно большой ток, и любое короткое замыкание может повредить двигатель и контроллер.
BEC (Battery Eliminator Circuit) на контроллере ESC сам подает (регулирует) постоянное напряжение +5 В, поэтому его можно использовать непосредственно для питания платы Arduino. Схема использует потенциометр, подключенный к контакту A0 платы Arduino, для управления скоростью вращения двигателя.
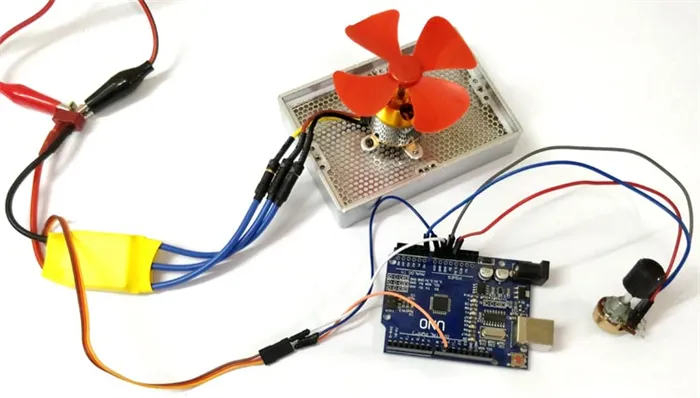
На следующем рисунке показано, как выглядит собранная деталь.
Объяснение программы для Arduino
Полный код программы можно найти в конце статьи, здесь мы рассмотрим только самые важные части программы.
Для управления двигателем BLDC формируется ШИМ-сигнал с частотой 50 Гц и переменным рабочим циклом от 0 до 100 %. Значение коэффициента заполнения регулируется потенциометром. Это означает, что вращением потенциометра регулируется скорость вращения двигателя. Как упоминалось ранее, управление BLDC двигателем очень похоже на управление серводвигателем с ШИМ 50 Гц, поэтому в данном случае мы используем ту же библиотеку, что и для управления серводвигателем. Если вы новичок в платформе Arduino, мы рекомендуем вам изучить принципы генерации ШИМ-сигнала на Arduino и подключения серводвигателя к плате Arduino, прежде чем вы продолжите чтение этой статьи.
Сигнал ШИМ может генерироваться только на цифровых выводах платы Arduino, которые подключены к ~. В нашей схеме мы будем управлять контроллером ESC через контакт 9 на плате Arduino, поэтому следующая команда подключит контроллер ESC к этому контакту: