Гидроэлектрогенераторы — это синхронные генераторы с явно выраженными полюсами, предназначенные для выработки электроэнергии при работе от гидротурбины (низкая скорость, 50-600 мин-1).
Использование синхронных двигателей в качестве компенсаторов
Большинство промышленных приемников во время работы потребляют реактивную мощность из сети в дополнение к активной мощности. Основными потребителями реактивной мощности являются асинхронные двигатели, трансформаторы, воздушные линии, реакторы, преобразователи и другое оборудование. Передача большого количества реактивной мощности в энергосистему через линии электропередачи и трансформаторы невыгодна по следующим основным причинам: 1) Из-за нагрузки реактивной мощности возникают дополнительные потери активной мощности и энергии во всех компонентах энергосистемы. 2) Имеются дополнительные потери напряжения. 3) Снижается мощность системы электроснабжения и трансформаторов. Поэтому рекомендуется снизить потребление реактивной мощности. В качестве компенсаторов используются массивы конденсаторов, синхронные двигатели и синхронные компенсаторы.
Современные двигатели, используемые в электроприводах, обычно производятся с коэффициентом мощности 0,9 при пиковом токе. Они являются эффективным средством компенсации реактивной мощности нагрузки. Генерируемая ими реактивная мощность зависит от параметров и режима работы двигателя и сети. Они должны быть подключены к сети как можно скорее. Использование современных двигателей в контексте промышленных предприятий целесообразно, если: 1) современные двигатели установлены в механизме двигателя вместо асинхронных двигателей, где это возможно по техническим условиям 2) установка современного двигателя с большей мощностью, чем требует механизм привода. Современные двигатели имеют следующие преимущества перед асинхронными двигателями: a) они могут использоваться в качестве компенсирующих устройств при относительно низких дополнительных первоначальных затратах. b) Экономичная конструкция при низких скоростях вращения, не требующая промежуточных передач между двигателем и движущимся двигателем c) Меньшая зависимость крутящего момента от изменения напряжения от скорости движущегося двигателя e)
Компенсационная способность двигателя зависит от нагрузки на его валу, напряжения, подаваемого на клеммы двигателя, и тока возбуждения. Если ток возбуждения падает ниже номинального тока, компенсационная способность двигателя снижается. Как правило, в практическом применении нагрузка на ось современных двигателей составляет (50-100) % от номинальной нагрузки. При такой нагрузке управление напряжением двигателя позволяет использовать современные электродвигатели в качестве компенсаторов реактивной мощности при работе с самым высоким коэффициентом мощности.
Современный компенсатор. Компенсатор реактивной нагрузки.
Синхронные компенсаторы — это легкие синхронные двигатели, которые работают в режиме холостого хода, т.е. без нагрузки на ось. При наличии перегрузки современный компенсатор вырабатывает реактивную мощность, при перегрузке он потребляет реактивную мощность с задержкой. Эта характеристика современных компенсаторов используется как для повышения коэффициента мощности, так и для регулирования напряжения в электрической сети.
Типовые топологии схем компенсации реактивной мощности
Независимо от типа компенсатора реактивной мощности, на сегодняшний день традиционными стали две топологии подключения к сетям переменного тока с линейными и нелинейными нагрузками.
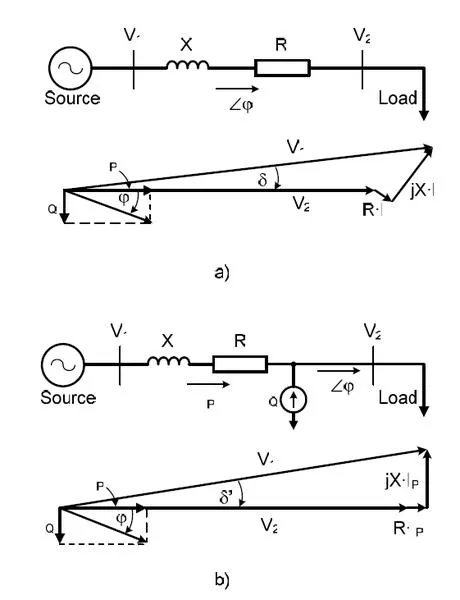
- Параллельная (или боковая) компенсация реактивной мощности. Реактивная мощность, вырабатываемая устройствами компенсации реактивной мощности, подключенными параллельно к электросети, не зависит от напряжения в точке подключения.
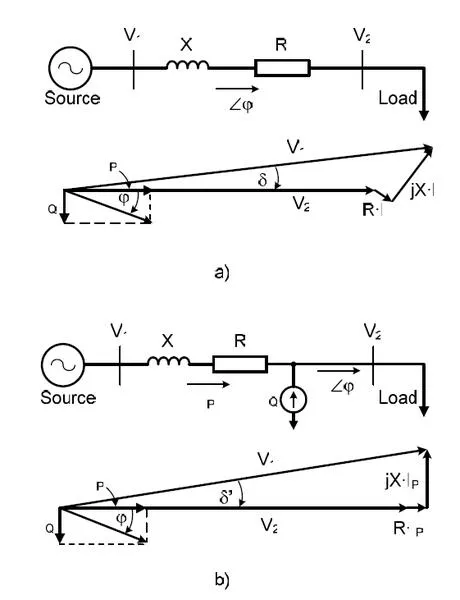
Рис. Параллельная (боковая) компенсация реактивной мощности в электродвигателях (индуктивные нагрузки): a — геометрия без компенсации, b — геометрия с компенсацией.
Преимуществами параллельных (боковых) систем компенсации реактивной мощности являются
- независимость реактивной мощности от напряжения в точке подключения; и
- способность плавно регулировать поток реактивной мощности для компенсации; и
- эффективная стабилизация сетевого напряжения.
Недостатком параллельной (горизонтальной) компенсации является ее ограниченная способность ослаблять резкие изменения (колебания) активной составляющей мощности.
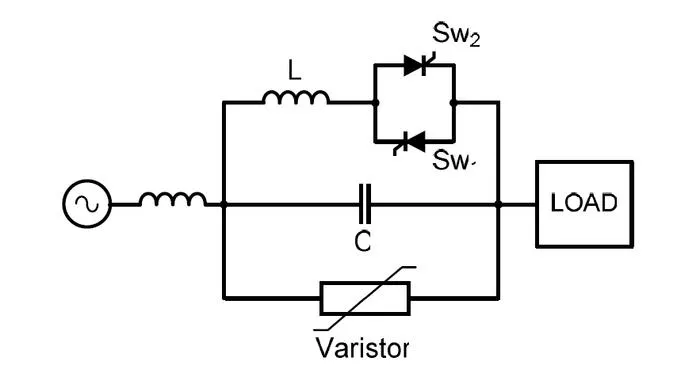
- Последовательная (вертикальная) компенсация реактивной мощности. Устройства, генерирующие (или потребляющие при компенсации перенапряжения) реактивную мощность, подключаются последовательно к сети для балансировки реакции линии передачи.
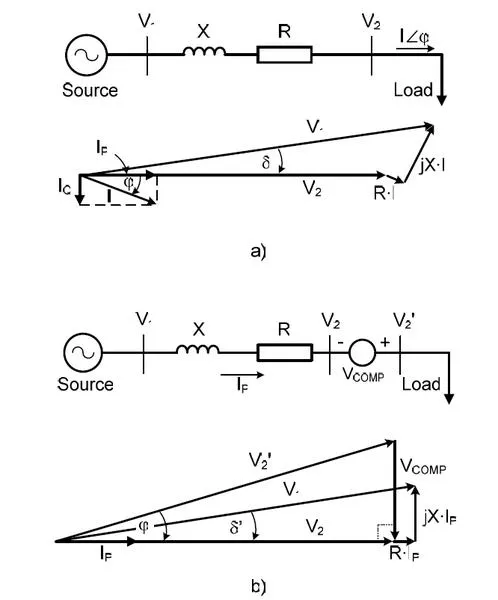
Рисунок. Параллельная (вертикальная) компенсация реактивной мощности двигателя: a — система без компенсации; b — система с компенсацией. Рис. Стандартная геометрия последовательных (вертикальных) компенсаторов реактивной мощности с защитой от перенапряжения.
Основными преимуществами таких последовательных (вертикальных) систем компенсации реактивной мощности являются Поток реактивной мощности может быть оптимизирован в различных фазах напряжения, возможна значительная степень компенсации, а оборудование может быть легко интегрировано в главную цепь. Мощность может быть компенсирована в любой фазе.
Значительная степень компенсации — простота интеграции компенсирующего устройства в сеть. Недостатками последовательной (вертикальной) компенсации реактивной мощности являются отсутствие регулирования сетевого напряжения, сложность управления устройствами с переменной нагрузкой и высокий риск перенапряжения при резких изменениях нагрузки из-за задержек в работе устройства.
Синхронный компенсатор реактивной мощности
Современные компенсаторы — это современные двигатели, которые не выполняют механическую работу. Их назначение — компенсировать реактивную мощность. Если механическая работа нагружена, она не может компенсировать реактивную составляющую в необходимом диапазоне.
Теория работы современных машин обсуждаться не будет, но каждый режим работы современных компенсаторов будет рассмотрен отдельно.
Рис. A) Векторная диаграмма работы при перевозбуждении
Можно сделать вывод, что синхронный компенсатор функционирует в двух режимах: компенсации и потребления реактивных составляющих. Это означает, что он может как потреблять, так и отдавать. Это обеспечивает поддержание баланса мощности в цепи. Он оснащен системой автоматического управления возбуждением, которая автоматически регулирует цепь COSφ. Он также обладает высокой инерционностью и не может быстро реагировать на изменения параметров схемы. При установке в сетях со значительно изменяющейся нагрузкой необходимо максимально оптимизировать настройки регулятора ACS, чтобы соблюсти риск аварийного отключения подстанции и не оштрафовать машину. Для впуска токов в сеть. Они рассчитаны на мощность до 100 000 кВа. Они имеют явно выраженную конструкцию полюсов и доступны с 2p = 6 или 8 медленными скоростями. Компенсаторы высокой мощности построены с водородным охлаждением.
Для асинхронного пуска они оснащаются пусковыми обмотками с полюсными выводами или изготавливаются с цельными полюсами. Они могут быть запущены напрямую или с помощью реактора. Асинхронные двигатели могут использоваться для разгона машин до синхронной скорости. Большинство из них имеют фиксированное напряжение детского питания 6 кВ или 10 кВ и располагаются на соответствующей линии ГПП.
Также было электромеханическое возбуждение, где оно применялось ранее, но используется до сих пор. Как правило, он работает с очень низкой чувствительностью и очень высокой инерционностью по отношению к цепи. Он дорог в обслуживании и эксплуатации. Если он выходит из строя, его ремонт занимает много времени. Самая примитивная схема возбудителя электродвигателя показана ниже.
ВЫВОД: Синхронный компенсатор является обратимым устройством. Это дорого, занимает много места, вызывает шум и иногда вибрацию. Его эксплуатация обходится недешево. Он также требует длительного ремонта в случае выхода из строя вращающихся элементов. По сравнению с современными средствами компенсации реактивной мощности он устарел.

На рисунке 2.26 показан синхронный компенсатор KSV с водородным охлаждением. Корпус компенсатора, его подшипники, масляный радиатор и масляный насос находятся в герметичном корпусе. Через изоляционные уплотнения 3 и 4.
Компенсация реактивной мощности в сетях промышленных предприятий
Компенсация реактивной мощности целенаправленно влияет на баланс между активной и реактивной мощностью в энергосистеме с целью регулирования мощности и в распределительной сети с целью снижения потерь электроэнергии. С помощью компенсирующих устройств (КУ) осуществляется компенсация (поддержание баланса между активной и реактивной мощностью).
В настоящее время основными нагрузками в электрической сети являются рекламные, распределительные и преобразовательные трансформаторы и полупроводниковые преобразователи. Эти ЭФС требуют больших реактивных токов для создания электромагнитных полей. Реактивные токи, колеблющиеся между источником и ЭПС, приводят к дополнительным нагрузкам на оборудование и линии электропередачи на всех этапах генерации, передачи и распределения электроэнергии.
Нарушения баланса между активной и реактивной мощностью приводят к колебаниям напряжения и частоты узлов нагрузки.
Активная энергия функционирует и превращается в механическую, оптическую и другие виды энергии для покрытия потерь. Активная мощность может вырабатываться только генератором электростанции.
Неактивная составляющая энергии не выполняет никакой полезной работы, но помогает генерировать магнитное поле, необходимое для работы источника питания. В этом случае электроэнергия, накопленная в каждом индуктивном элементе, рассеивается в сети без рассеивания в активных элементах, но совершает колебательное движение (от нагрузки к генератору и наоборот). Передача реактивной мощности от генератора к потребителю через сеть (индуцированный переменный ток) уменьшает активную мощность сети (cosφ сети), что дополнительно заряжает сеть и уменьшает ее общую мощность.
Так, например, ТГ 1250 кВА с номинальной мощностью cosφN = 0,8 может обеспечить потребителей активной мощностью, равной 1250 x 0,8 = 1000 кВт. Если генератор работает при cos φ = 0,6, чистая реактивная выходная мощность составит 1250 x 0,6 = 750 кВт. Это означает, что генерируемая реактивная мощность ТН снижается на 25%. Поэтому увеличение реактивной мощности, вырабатываемой генератором в условиях перенапряжения, нецелесообразно. Количество генерируемой реактивной мощности (Q) равно sinφ, который равен отношению реактивной мощности Q к кажущейся мощности S (sinφ = Q / S).
Общая реактивная мощность включает в себя реактивную мощность, вырабатываемую генераторами электростанции, реактивную мощность воздушных линий электропередачи (явление мощности, мощность, пропорциональная длине линии электропередачи и квадрату напряжения) и реактивную мощность СИТХЯ. Она подключена к электросети. Реактивная мощность также может регулироваться современным двигателем станции (ММ), постоянным током в перевозбужденном или недовозбужденном состоянии, а также конденсаторными решетками (DC). Более целесообразно использовать реактивную мощность от заводских источников (СВ, ТЭЦ, СП), так как они находятся в шаговой доступности от потребителей (например, АП). Это уменьшает количество и площадь поперечного сечения линий электропередач, количество устанавливаемых трансформаторов и другие сетевые затраты, связанные с передачей реактивной мощности.
Общая мощность установленных на заводе компенсаторов QQ зависит от нагрузки холостого хода (QM) и максимальной реактивной мощности QC. Они могут быть переданы из энергосистемы в заводскую сеть в периоды максимальной активной нагрузки. Расчет ИБП kvar с использованием приблизительного расчета потерь мощности в сети завода: kvar.
2. Оборудование и средства для решения проблем компенсации реактивной мощности
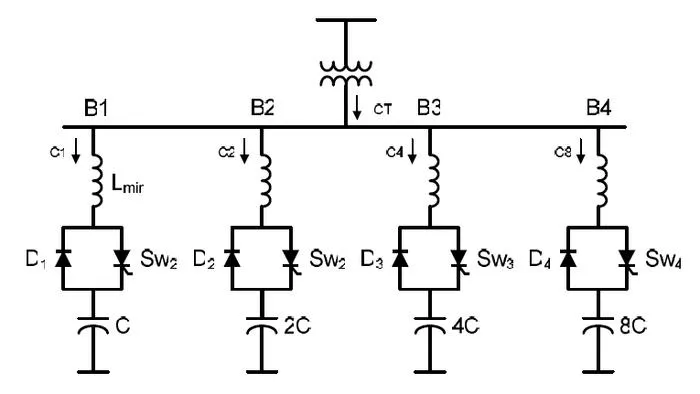
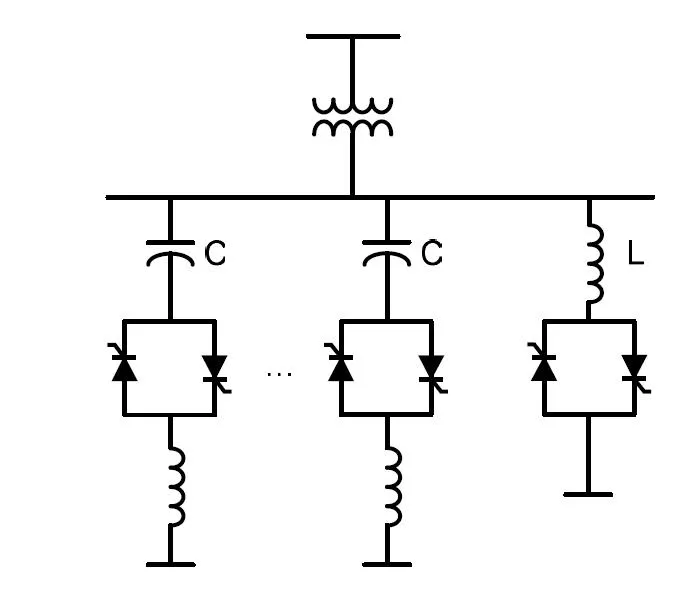
Реактивная мощность может компенсироваться высоко-, средне- и низковольтными устройствами SITHYA на основе контакторов и тиристоров. Они выпускаются в различных климатических исполнениях, фильтрокомпенсаторы (FCU), батареи статических конденсаторов (BSC), однофазные и трехфазные низковольтные и высоковольтные конденсаторы, компенсаторы SR и синхронные компенсаторы (SC), косинусные компенсаторы, антиреактивные блоки, статические тиристорные компенсаторы.
Различают поперечную и продольную компенсацию реактивной мощности.
При боковой компенсации индуктивные и емкостные цепи КУ соединяются параллельно. В этом случае ток в неразветвленной части цепи равен геометрической сумме индуктивного и емкостного токов. Индуктивный ток отстает от напряжения, а емкостной ток опережает напряжение. При соответствующих значениях емкости общий ток больше, чем индуктивная нагрузка нагрузки, что увеличивает коэффициент мощности (cosφ) системы. Увеличение cosφ системы за счет подачи реактивной мощности увеличивает емкость линии и повышает эффективную нагрузку на трансформатор без увеличения емкости.
При поперечной компенсации реактивной мощности потери активной мощности снижаются, когда ток нагрузки уменьшается, напряжение сети увеличивается, а потери в отдельных элементах электросети уменьшаются. Для снижения потерь в питающей сети конденсаторы следует подключать как можно ближе к потребителям. Преимуществами перекрестной компенсации являются простота и низкая стоимость, доступность используемых материалов, низкие потери активной мощности, а недостатками — отсутствие плавного регулирования вводимой в сеть реактивной мощности, риск возникновения пожара, наличие остаточной нагрузки.
При продольной компенсации конденсаторы подключаются последовательно с нагрузкой через разделительный трансформатор или повышающий трансформатор напряжения, через который протекает полный ток сети, включая ток короткого замыкания. Продольная компенсация обеспечивает автоматическое регулирование напряжения в зависимости от тока нагрузки.
Однако при продольной компенсации возможны аварийные ситуации: колебания «железо-туман», перенапряжения при разгерметизации конденсатора и выход конденсатора из строя. Если в цепи питания происходит внезапное повышение напряжения, конденсаторы должны быть немедленно разряжены через искровой промежуток и зашунтированы высоковольтным выключателем. Продольная компенсация используется в высоковольтных линиях для повышения стабильности энергосистемы и увеличения пропускной способности линий.
Выбор оборудования для компенсации реактивной мощности зависит исключительно от места и цели его установки.
Конденсаторные батареи (КБ) являются основным средством компенсации (выделения реактивной мощности) на подстанции среднего/высокого напряжения. Снижение реактивной мощности от генераторов через энергосистему к фидеру уменьшает потери и нормализует напряжение в сети. СВ устанавливаются вблизи точки потребления реактивной мощности, а для изменения выходной мощности на различные режимы работы, при необходимости, устанавливаются системы автоматического управления. Примерами использования KB являются заводы по электролизу алюминия, крупные ртутные выпрямительные установки и цеха с большим количеством АД. При прерывистой зарядке и разрядке конденсаторы создают перегрузку по току, в результате чего ток в следующей фазе нарастает раньше, чем если бы в цепи не было конденсаторов, что заставляет массив конденсаторов вырабатывать реактивную мощность. Таким образом, мощность, поступающая в систему при наличии конденсаторной батареи (Q П) больше, чем номинальная емкость батарей (Q конденсаторы). Можно воспроизвести компенсирующее воздействие на систему (Q E ) в присутствии СВ:
3. Выбор мощности и места размещения компенсационных установок
После расчета требуемой суммарной мощности блоков СВ (Q Cu) необходимо определить их расположение и выбрать блоки типовой мощности.
Для промышленных установок необходимая реактивная мощность Q КУ обеспечивается среднеквадратичным значением ( Q SD) и установленные БК, квар:
где Q bn — реактивная мощность СВ, необходимая для ЭП до 1 кВ, квар; Q bv — реактивная мощность СВ, необходимая для ЭП выше 1 кВ, квар.
Реактивная мощность S QtNt, передаваемая со стороны высокого напряжения через трансформаторы 6(10)/0,4(0,6) кВ при условии баланса мощностей на шинах трансформатора, должна быть рассчитана в квар:
где величина Σ QtNt определяется номинальной мощностью отводов трансформатора SNt в их количестве Nt , коэффициентом загрузки трансформатора Kt и расчетной активной нагрузкой от нагрузок от нагрузок, работающих при напряжении до 1 кВ PcuS N .
Если условие Q рассчитываетсяS N ≥ Σ QtРеактивная мощность qt проходящая через цеховую трансформаторную подстанцию, определяется по минимальному условному значению потерь активной мощности (активное сопротивление кабельной линии 6(10) кВ) для группы трансформаторов НТ с одинаковой номинальной мощностью.

Уравнение (1) может быть выражено в KVAR.

Необходимая мощность МС, установленного в сети до 1 кВ с трансформаторами JOST, определяется исходя из цены QT и реактивной нагрузки QC этой сети Jostest Fu, Квар.
Из полученных значений Q BN J определяются стандартные значения мощности QKYJ. Расчеты показывают, что передача реактивной мощности в сети с максимальным напряжением 1 кВ невыгодна из-за увеличения количества необходимых трансформаторов.
Мощность СЭЭ в сетях выше 1 кВ определяется состоянием реактивного баланса вторичных каналов главной понизительной подстанции (ГПП).
Там, где ИБП имеют высокое напряжение (6 (10) кВ), учитывается также генерируемая ими реактивная мощность, если она может быть использована в качестве источника реактивной мощности. Если их мощности недостаточно для поддержания баланса, недостающая мощность в км yt, кв:.
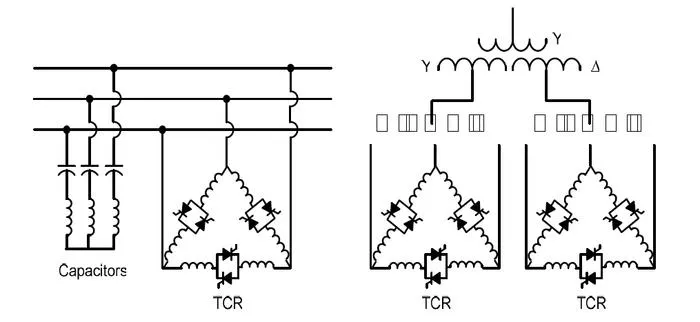
Если рабочий цикл трансформатора в цехе невелик, предпочтительнее установить высоковольтные конденсаторы (>1 кВ), поскольку они имеют более низкую удельную стоимость за квар, чем низковольтные конденсаторы. Конденсаторы сети 6 (10) кВ обычно располагаются в треугольной схеме (рис. 5, A).
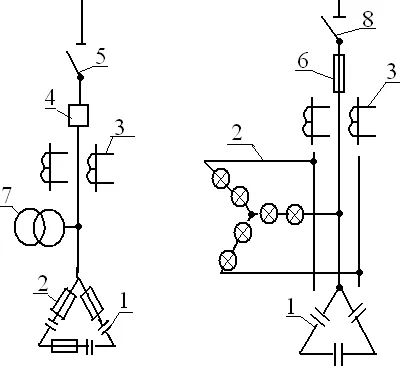
Рис. 5 — Схема подключения конденсаторов: a — через выключатель до 6 (10) кВ- b, через выключатель и предохранитель до 1 кВ.
) u ном, а напряжение sc составляло (30-65%) u ном, но ток не превышал (2 -2,8).
Устройство, работа и применение синхронного электродвигателя
Современные двигатели — это электрические двигатели, работающие от сети переменного тока. Современные машины называются современными потому, что скорость вращения курсора точно соответствует частоте магнитного поля, индуцируемого статором.
Как и вращающиеся электрические двигатели, современные двигатели состоят из бегунка, в данном случае катушки, и статора, также называемого оружием. Бегунок (катушка) имеет стимулирующую обмотку, которая приводится в движение постоянным напряжением через коллекторный механизм. Статор имеет обмотки переменного тока, которые образуют магнитное поле. Само магнитное поле движется в круговом направлении. Другими словами, он вращается. При взаимодействии с полем катушки на курсоре создается электромагнитный момент. Первоначально двигатель запускается с использованием асинхронного режима работы, т.е. короткого вращающегося курсора. В этом режиме машина, которая по сути является асинхронной, разгоняется со скоростью, приближающейся к современной. Затем на обмотку катушки подается постоянный ток (разумеется, обмотка отключена).
Типовые топологии схем компенсации реактивной мощности
Независимо от типа компенсатора реактивной мощности, на сегодняшний день традиционными стали две топологии подключения к сетям переменного тока с линейными и нелинейными нагрузками.
- Параллельная (или боковая) компенсация реактивной мощности. Реактивная мощность, вырабатываемая устройствами компенсации реактивной мощности, подключенными параллельно к электросети, не зависит от напряжения в точке подключения.
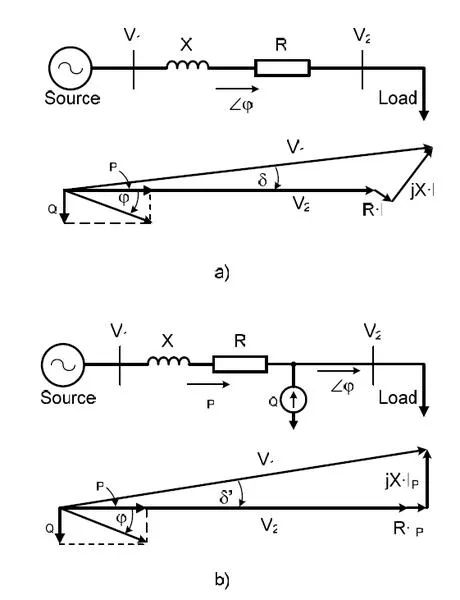
Рис. Параллельная (боковая) компенсация реактивной мощности в электродвигателях (индуктивные нагрузки): a — геометрия без компенсации, b — геометрия с компенсацией.
Преимуществами параллельных (боковых) систем компенсации реактивной мощности являются
- независимость реактивной мощности от напряжения в точке подключения; и
- способность плавно регулировать поток реактивной мощности для компенсации; и
- эффективная стабилизация сетевого напряжения.
Недостатком параллельной (горизонтальной) компенсации является ее ограниченная способность ослаблять резкие изменения (колебания) активной составляющей мощности.
- Последовательная (вертикальная) компенсация реактивной мощности. Устройства, генерирующие (или потребляющие при компенсации перенапряжения) реактивную мощность, подключаются последовательно к сети для балансировки реакции линии передачи.

Рисунок. Параллельная (вертикальная) компенсация реактивной мощности двигателя: a — система без компенсации; b — система с компенсацией. Рис. Стандартная геометрия последовательных (вертикальных) компенсаторов реактивной мощности с защитой от перенапряжения.
Основными преимуществами таких последовательных (вертикальных) систем компенсации реактивной мощности являются Поток реактивной мощности может быть оптимизирован в различных фазах напряжения, возможна значительная степень компенсации, а оборудование может быть легко интегрировано в главную цепь. Мощность может быть компенсирована в любой фазе.
Значительная степень компенсации — простота интеграции компенсирующего устройства в сеть. Недостатками последовательной (вертикальной) компенсации реактивной мощности являются отсутствие регулирования сетевого напряжения, сложность управления устройствами с переменной нагрузкой и высокий риск перенапряжения при резких изменениях нагрузки из-за задержек в работе устройства.
Область применения
Ассортимент современных двигателей определяется конкретными характеристиками.
- — стабильность частоты вращения при колебаниях напряжения питания и изменениях механической нагрузки на вал; — стабильность частоты вращения при изменениях напряжения питания и механической нагрузки на вал; и
- — Работает при очень высоком коэффициенте мощности — до единицы.
Первое свойство делает современные двигатели незаменимыми в качестве узлов перемещения для точных инструментов. Современные двигатели также часто используются для привода мощных насосов, компрессоров и вентиляционных систем. Именно поэтому они используются почти исключительно в качестве гидратов и турбин на электростанциях. Вторая особенность современных двигателей делает их привлекательными для использования в качестве источника неактивной энергии, позволяя гибко регулировать коэффициент мощности и уровень напряжения в сети. Экономия может быть достигнута при более высоком косинусе ФИ за счет соответствующих контрактов на электроэнергию. С современными двигателями, работающими при коэффициенте мощности агрегата, двигатель потребляет из сети только активную мощность, снижая потери в линии электропередачи. Причина этого в том, что потери в линии совместимы с полной мощностью, и в этом случае последняя уменьшается в размере за счет уменьшения неактивной составляющей до нуля. Современные двигатели, работающие в сверхурочных условиях, — это современные противовесы.
Другими словами, они являются реактивными генераторами, которые могут обеспечить реактивный спрос подключенных потребительских устройств.
Мощный синхронный двигатель, оснащенный системами автоматического управления возбуждением с обратной связью по напряжению и форсированием тока возбуждения, является инструментом регулирования и перераспределения потоков реактивной мощности и уровней напряжения в электрической сети. Выбор синхронных двигателей при проектировании и при реконструкции электросетей крупных потребителей обеспечивает повышение устойчивости работы энергосистемы, разгрузку линий электропередачи, улучшение качества электроэнергии, дает возможность минимизировать затраты на покупку электроэнергии.
Указанные особенности синхронных компенсаторов, а также возможность их запуска только от источников питания большой мощности ограничивают их применение на подстанциях энергосистем.
Чем ограничивается область устойчивой работы синхронного двигателя
К1 больше напряжения сети U К (рис. 2.25).
Под действием разности напряжений DU= E
Kl — U K в статоре СК возникает ток I K1, отстающий от вектора DU 1, на 90°. Компенсатор в этом режиме отдает в сеть реактивную мощность. В режиме недовозбуждения ток E K2 < U K , в статоре СК возникает ток I K2 , опережающий вектор DU 2на 90°, т.е. СК будет потреблять реактивную мощность из сети. Синхронные компенсаторы не несут активной нагрузки на валу, поэтому их конструкция облегчена. Компенсаторы выполняются тихоходными (750–1000 об/мин) с горизонтальным валом и явнополюсным ротором.
Рис. 2.25. Векторная диаграмма синхронного компенсатора в режимах перевозбуждения и недовозбуждения
На рисунке 2.26 показан синхронный компенсатор KSV с водородным охлаждением. Корпус компенсатора, его подшипники, масляный радиатор и масляный насос находятся в герметичном корпусе. Через изоляционные уплотнения 3 и 4.
на статор 7 подается напряжение 10,5 кВ, а на контактные кольца — питание от возбудителя. В нижней части корпуса расположены два масляных насоса 8, масляный бак и водяной маслоохладитель. Циркуляция водорода поддерживается под давлением 0,1-0,2 МПа вентиляторами 5, которые засасывают водород из корпуса и прогоняют его через внутреннюю часть корпуса компенсатора. Нагретый водород поступает во входные отверстия 12 вертикальных газоохладителей, где охлаждается.
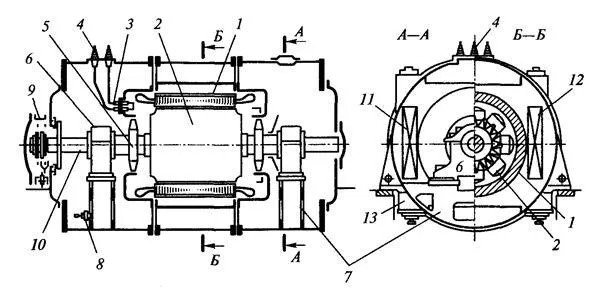
Рис. 2.26. Синхронный компенсатор типа КСВ:
— статор; 2 — ротор; 3, 4 — изолирующие уплотнения; 5 — вентилятор; 6 — подшипник; 7 — площадки подшипников; 8 — масляный насос; 9 — камера контактного кольца; 10 — вал; 11, 12 — выходные и входные отверстия в газоохладителе;
Синхронный компенсатор характеризуется номинальной мощностью, напряжением, током статора, частотой и номинальным током ротора. Шкала мощности определяется в соответствии с ГОСТ 609-84. Номинальное напряжение синхронного компенсатора на 5-10% выше номинального напряжения сети.
В зависимости от тока возбуждения синхронный компенсатор может работать в режимах перевозбуждения и недовозбуждения, вырабатывать или потреблять реактивную мощность. Регулирование тока возбуждения осуществляется специальными схемами АВР.
Синхронные компенсаторы малой мощности имеют схему независимого возбуждения электрической машины (см. рис. 2.9, a
) В более мощных машинах с водородным охлаждением (МВО) возбуждение осуществляется от специального бесщеточного возбудителя, встроенного в корпус компенсатора.
Схема АГП синхронных компенсаторов такая же, как и у генераторов.
Мощные СК (10000 кВА и выше) включаются в сеть через реактор для ограничения пусковых токов и посадки напряжения на шинах (рис. 2.27). Параметры реактора выбираются таким образом, чтобы в момент пуска напряжение на шинах подстанции не опускалось ниже (80-85 %
) u ном, а напряжение sc составляло (30-65%) u ном, но ток не превышал (2 -2,8).
Разновидности синхронных машин
Однофазные показывающие сельсины электровоза ВЛ8
Гидроэлектрогенераторы — это синхронные генераторы с явно выраженными полюсами, предназначенные для выработки электроэнергии при работе от гидротурбины (низкая скорость, 50-600 мин-1).
Турбогенераторы — неявно полярные синхронные генераторы, предназначенные для выработки электрической энергии при высоких скоростях вращения ротора 6000 (редко), 3000 и 1500 об/мин при работе от паровой или газовой турбины.
Синхронные компенсаторы — синхронные двигатели, предназначенные для генерирования реактивной мощности и работающие без нагрузки на валу (режим холостого хода). В этом случае через обмотку якоря протекает практически только реактивный ток. Синхронные регуляторы могут работать в режиме коррекции коэффициента мощности или в режиме стабилизации напряжения. Подача индуктивной нагрузки.
Машины с двойным питанием (особенно ACM) — синхронные машины, питающие обмотки ротора и статора токами разной частоты. Это создает асинхронный режим работы.
Ударные генераторы — синхронные генераторы (обычно 3-фазного тока). Предназначен для кратковременной работы в режиме короткого замыкания (КЗ).
Сельсин — синхронная машина малой мощности, используемая в качестве датчика угла поворота или в сочетании с другим сельсином для передачи угла поворота без прямого механического соединения.
Также доступны безредукторные, шаговые, индукторные, гистерезисные и бесконтактные синхронные двигатели.
Бесконтактные синхронные двигатели
Бесштыревой синхронный генератор ГТ40ПЧ6 (поз. 9) для авиационных двигателей НК-8.
Обычные синхронные двигатели имеют недостатки. Щеточные контактные кольца изнашиваются быстрее, чем другие части машины, из-за электрической эрозии и простого механического износа. Кроме того, искры от щеток могут привести к взрыву. По этой причине бесконтактные трехмашинные синхронные генераторы стали популярны сначала в авиационной промышленности, а затем и в других отраслях (в частности, автономные дизель-генераторы). В корпусе такого агрегата находятся три машины — возбудитель, возбудитель и генератор, роторы которых вращаются на общем валу. Возбудитель представляет собой синхронный генератор с возбуждением от вращающегося постоянного магнита на роторе, напряжение которого подается на блок управления генератором, где оно выпрямляется, регулируется и подается на обмотку статора возбудителя. Магнит поля статора индуцирует ток в обмотке возбудителя. Этот ток выпрямляется вращающимся выпрямительным блоком (ВВБ), расположенным на валу, и подается в обмотку возбуждения генератора. Генератор уже вырабатывает ток, который поступает к потребителю.



Такая схема обеспечивает как отсутствие других механических частей в двигателе, за исключением подшипников, так и автономную работу генератора — пока генератор вращается, подвозбудитель обеспечивает напряжение и схему, которые могут быть использованы для питания управления генератором.
Чем ограничивается область устойчивой работы синхронного двигателя
В соответствии с принципом обратимости, синхронные машины могут работать как в режиме двигателя, так и в режиме генератора. Если вал синхронного генератора, работающего параллельно с сетью электропитания, отключается от первичного двигателя без отключения цепей статора и ротора, синхронная машина работает в двигательном режиме. В этом случае трехфазные токи в обмотках статора синхронной машины генерируют вращающееся магнитное поле, которое взаимодействует с магнитным полем ротора, заставляя ротор вращаться с синхронной скоростью.
Чтобы понять, как работает современный двигатель, рассмотрим модель (рис. 19.1), состоящую из внутренней магнитной системы с разными полюсами, разделенными зазорами. Обе системы могут вращаться вокруг общей оси с помощью внутренней системы (ротора) на валу.
Когда к внешней магнитной системе прикладывается крутящий момент M, M, она начинает вращаться, и при подключении к трехфазной сети генерируется вращающееся поле, похожее на вращающееся поле обмотки статора. Благодаря магнитной связи между противоположными полюсами магнитной системы, вращение внешней системы полюсов передается внутренней системе. В результате ротор начинает вращаться в том же направлении, что и поле внешней системы.
Пренебрегая трением, можно предположить, что момент, действующий на вращение, равен нулю в заряде без нагрузки. Тогда полюса магнитной системы, вращающиеся с одинаковой частотой и в одном направлении, выравниваются относительно друг друга (рис. 19.1, а). При приложении к валу тормозной силы в виде противоположного момента М2 внутренняя система полюсов смещается относительно внешней системы на угол, равный нулю (рис. 19.1, б), величина которого определяется. цена противоположного момента.
В современных двигателях, в отличие от рассматриваемой модели, вращающееся поле создается не вращением магнитной системы, а трехфазными токами обмоток статора. Мощность, вырабатываемая на валу двигателя, компенсируется мощностью, предоставляемой сетью.
Таким образом, в современных двигателях, как и в генераторах, взаимодействие между токами статора и магнитным полем бегунка — это то, что создает электромагнитный момент (см. рис. 12.2), но в отличие от генератора, этот момент является двигательным.
Из-за изменения нагрузки на вал современного двигателя углы показывают изменение между вектором МП бегунка и вектором МП старой обмотки. Увеличение угла© курсора, т.е. вектора МП курсора генератора (курсора вала) происходит раньше вектора МП статора, тогда как у двигателей это сопровождается увеличением грузоподъемности вала. Угол © направлен в сторону, противоположную вращению бегунка (сравните рис. 12.2 и 19.1, b).
Это также иллюстрирует векторная диаграмма современного двигателя (рис. 19.2). Перед рассмотрением этой диаграммы вернемся к векторной диаграмме последних генераторов, работающих вдоль сети (см. рис. 12.1, б). Уменьшение крутящего момента MI капитального двигателя уменьшает угол © современного генератора. Когда этот момент уменьшается до значения, равного разгрузке генератора (Mi = M0), угол © = 0 и векторная диаграмма приобретает вид, показанный на рис. 12.1, а.
Крутящий момент ММ еще больше уменьшается, особенно за счет удаления оси последнего двигателя от основного двигателя и создания этой оси крутящего момента М2, так что последний двигатель переходит в режим двигателя. 2 снижается в цене и 3. Теперь перед током двигателя 113 находится напряжение сети UC.