Бегунок фазы имеет три фазные обмотки, почти идентичные обмоткам на статоре. Их концы соединены с макетом звезды, а оставшиеся свободно ведут к кольцу. Существуют также щетки, позволяющие вводить резисторы. Это помогает изменить активное сопротивление усиливающей цепи. Это уменьшает большие токи загрузки.
Электродвигатель переменного тока
Электрические двигатели уже давно зарекомендовали себя как лучший силовой агрегат для многих видов оборудования. Они есть в автомобилях и пылесосах, современных станках и обычных детских игрушках. Они встречаются практически везде, но различаются по типу, конструкции и эксплуатационным характеристикам.
Электродвигатели — это силовые агрегаты, способные преобразовывать электричество в механическую энергию. Существует два основных типа: двигатель переменного тока. Разница между ними заключается в типе источника питания, как следует из названия. В этой статье описывается первый вид — двигатель переменного тока.
Устройство и принцип работы
Движущей силой электродвигателей является электромагнитная индукция. В двух словах, электромагнитная индукция — это возникновение токов в проводниках в переменных магнитных полях. Источником магнитного поля переменного тока является неподвижный корпус двигателя с обмоткой UP-статора, который подключен к источнику переменного тока. В нем находится подвижный элемент — ротор, на котором генерируется ток. Согласно закону Ампера, на заряженные проводники магнитного поля начинает действовать электрическая сила — ЭДС, которая вращает вал ротора. Таким образом, электроэнергия, подаваемая на статор, преобразуется в механическую энергию для курсора. К вращающемуся валу можно подключать различные механизмы для выполнения полезных задач.
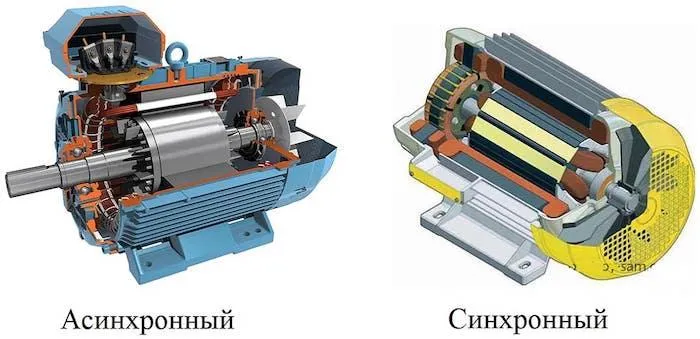
Двигатели переменного тока делятся на современные асинхронные и асинхронные двигатели. Они отличаются тем, что в первом случае магнитные поля ротора и статора вращаются с одинаковой скоростью, а во втором случае ротор вращается медленнее, чем магнитные поля. Методы строительства и эксплуатации различны.
Асинхронные двигатели
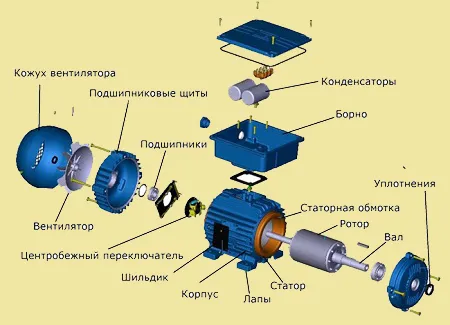
Конструкция асинхронных двигателей
Вращающееся переменное магнитное поле находится в статоре асинхронного двигателя, конец которого прикреплен к коробке передач. Если во время работы двигатель нагревается, на валу двигателя установлен охлаждающий вентилятор.

Бегунок асинхронного двигателя состоит из детали с валом. Он называется короткозамкнутым бегунком, поскольку состоит из металлических прутьев, замкнутых друг на друга с обеих сторон. Она похожа на клетку. Поэтому, часто называемый «белкой», медленное вращение курсора по сравнению с вращением магнитного поля является результатом потери мощности из-за подшипников. Кстати, если нет разницы в скорости, то нет и электромагнитного заряда, без которого не было бы ни электричества в курсоре, ни самого вращения.
Магнитное поле вращается благодаря постоянному изменению направления полюсов. Соответственно меняется направление тока обмотки. Скорость вращения асинхронного двигателя зависит от количества полюсов в магнитном поле.
Современные двигатели
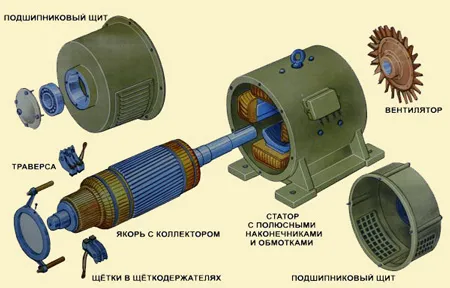
Строительство.
Современные конструкции двигателей несколько отличаются. Как следует из названия, в этом двигателе ротор вращается с той же скоростью, что и магнитное поле. Он состоит из корпуса с прикрепленной к нему обмоткой и ротора или якоря с такой же обмоткой. Концы обмотки выводятся наружу и крепятся к коллектору. Коллектор или контактное кольцо приводится в действие щеткой для тонера. Концы обмотки расположены таким образом, что одновременно может быть активирована только одна пара.
В отличие от асинхронных двигателей, ротор синхронного двигателя не индуцируется переменным магнитным полем, а приводится в действие щетками, которые заряжают обмотки. Направление тока в обмотке ротора изменяется параллельно направлению магнитного поля, поэтому выходной вал всегда вращается в одном направлении. В современных двигателях скорость вращения вала можно регулировать путем изменения величины напряжения. На практике для этой цели обычно используется розетка.
Краткая история создания
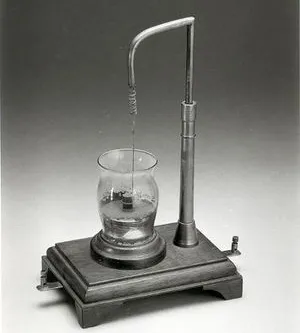
Английский ученый М. Фарадей впервые обнаружил возможность преобразования электричества в механическую энергию в 1821 году. Его опыт с помещением проволоки в ртутную ванну, снабженную магнитом, показал, что проволока, подключенная к источнику тока, начинает вращаться. Несмотря на то, что ртуть заменили на безопасную соленую воду, многие, вероятно, помнят этот простой эксперимент еще со школы. Следующим шагом в его исследовании этого явления стало создание колеса Барлоу — монопольного двигателя. Он не нашел никаких полезных применений, но наглядно продемонстрировал поведение заряженного проводника в магнитном поле.
На заре создания электродвигателей ученые пытались создать модели с ядрами, которые имели возвратно-поступательное, а не циркулирующее движение в магнитном поле. Он был предложен в качестве альтернативы поршневому двигателю. Первый электродвигатель в известном виде был создан в 1834 году русским ученым Б.-С. Якоби. Именно он предложил идею использования вращающегося оружия в магнитном поле и создал первые функциональные образцы.
Первый асинхронный двигатель на основе вращающегося магнитного поля появился в 1870 году. Явление вращающегося магнитного поля было создано независимо друг от друга двумя учеными, Г. Феррарисом и Н. Тесла. Последнему также принадлежала идея создания электродвигателя без выключателя. Его конструкция была использована для строительства нескольких электростанций с двухфазными двигателями переменного тока. Следующей успешной разработкой стал трехфазный двигатель, предложенный M.-O. Доливо-Добровольский. его первая действующая модель была представлена в 1888 году, за ней последовала серия более совершенных двигателей. Этот русский ученый не только объяснил принцип работы трехфазных двигателей, но и изучил возможности использования различных типов соединения фаз (треугольник и звезда) и различных напряжений тока. Он был изобретателем пусковой розетки, трехфазного трансформатора и разработал схему подключения двигателя и генератора.
Поэтому ротор и статор являются наиболее важными компонентами асинхронного двигателя переменного тока. Они проектируются с помощью CAD (системы автоматизированного проектирования). В следующих разделах более подробно описана конструкция ротора и статора.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ
- Количество рабочих фаз — одна или три (кроме моделей с шаговой системой)
- Питание — электрическое и на валу, и
- Схема соединения обмоток («звезда» или «треугольник»), и
- Категории защиты оборудования.
Однофазные машины запускаются либо вручную, либо оснащаются специальной пусковой обмоткой (фазосдвигающая цепь с конденсатором).
В трехфазных машинах вращающееся поле ЭДС создается тремя независимыми катушками, расположенными в статоре под углом 120° друг к другу. Их соответствующие ЭДС разделены одинаковым углом в электрическом пространстве.
1.Мощность потребляется из сети фазными обмотками двигателя в рабочем режиме.
2.Механическая мощность вала — это сила вращения, создаваемая ЭПТ, измеряется в ваттах и характеризует эффективность преобразования или общий КПД двигателя.
Схема соединения обмоток выбирается с учетом особенностей конструкции агрегата и условий его эксплуатации. В большинстве случаев схемы включения типа «звезда» используются в бытовом электрооборудовании и инструментах.
Класс защиты электродвигателей от проникновения механических частиц грязи и от влаги устанавливается в соответствии с EN 60034.
Это обозначается двумя буквенными IP, за которыми следует цифра. Первый соответствует уровню защиты от твердых частиц, второй — от проникновения влаги.
КОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА
- Специально разработанный ротор ;
- Статор с первичной обмоткой и обмоткой возбуждения.
- Коллекторный блок с набором щеток.
Основой ротора (якоря) является магнитопровод, изготовленный из листовой электротехнической стали, с катушками из медного провода между полюсами по определенной схеме.
Концы обмотки отводятся к коллекторному узлу, коммутаторной части системы (где они коммутируются). Обмотка якоря используется для соединения обмоток статора в гирляндную цепь. Создаваемое им магнитное поле взаимодействует с магнитным потоком в статоре, создавая необходимый крутящий момент.
Преимущества и недостатки.
К преимуществам коллекторных двигателей переменного тока относятся плавный пуск и простота схемы возбуждения, включенной последовательно с основной обмоткой. Следует отметить, что могут быть получены значительные значения крутящего момента. Они более надежны в эксплуатации и хорошо «держат» предельную нагрузку на вал.
- Более высокий уровень шума ;
- Более низкий КПД по сравнению с конструкциями без выпрямителей.
- Необходимость регулярного обслуживания коллекторного блока в связи с износом и загрязнением элементов (ламелей) коллекторного блока.
- Необходимость обновления и регулировки щеток ;
- Высокий уровень радиопомех.
К недостаткам коллекторных двигателей относятся недостаточная надежность рабочих узлов и короткий срок службы компонентов.
Область применения коллекторных двигателей определяется особенностями их конструкции.
При частоте сетевого напряжения 50 Гц частота вращения вала этих изделий достигает 9000-10 000 об/мин. Поэтому двигатели коллекторного типа широко используются в самых разных классах бытовой техники.
- Стиральные машины ;
- Электрические кофемолки, кофемолки и миксеры ;
- Электроинструменты (дрели, болгарки, сверла и т.д.).
Сегодня традиционные коллекторные двигатели по возможности заменяются современными бесщеточными.
Современные электронные удлинители и более низкие затраты делают их производство более выгодным. В то же время совершенствуются схемы управления на основе различных классов полупроводниковых приборов.
УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
Управление двигателями переменного тока основано на принципе, что скорость вращения вала зависит от напряжения, подаваемого на обмотку статора.
Для постоянных значений тока это означает, что мощность, передаваемая в цепь нагрузки (ротор), изменяется. Еще один параметр, который часто необходимо контролировать при эксплуатации двигателей этой категории, — направление вращения вала (реверс).
Обе возможности реализуются с помощью различных схем, основанных на том или ином типе компонентов.
- Транзисторы или релейные переключатели
- Тиристорные компоненты,.
- Электронные тиристоры (симисторы).
Транзисторы сегодня используются редко, в тридцатые годы их заменили более эффективными тиристорами.
Они могут использоваться для прямого изменения мощности, подаваемой в цепь нагрузки ротора. Для этого используются современные методы управления амплитудой или фазой импульса.
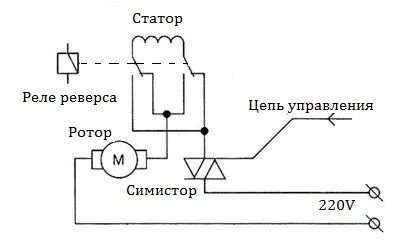
В качестве примера показана комбинированная система управления двигателем. Направление вращения ротора контролируется реверсивным реле, которое попеременно включает то один конец катушки статора, то другой конец сетевого напряжения.
Специальный электронный компонент, симистор, используется для достижения желаемой скорости вращения вала и мощности, подаваемой непосредственно на нагрузку. Диафрагма регулируется либо подачей соответствующего напряжения на управляющий электрод, либо серией квадратных импульсов.
В последнем случае частота повторения определяет время открытия прямого соединения симистора, что в конечном итоге определяет количество мощности, передаваемой в цепь управляемого ротора.
© 2014-2022 Все права защищены. Все материалы на этом сайте предназначены только для информационных целей и не могут быть использованы в качестве руководства или нормативных документов.