I Ф1=380 × 314 × 294 × 1 0-6 =35,1 A- I Ф2=70.2 A- I Ф3=140.4 A- I Ф4=280,8 А.
Компенсатор реактивной мощности схема: Как компенсировать реактивную мощность: виды компенсаторов, устройство, схемы
Страница 18 из 20
Увеличение активных нагрузок на промышленных предприятиях сопровождается соответствующим увеличением потребления реактивной мощности. Поэтому важно компенсировать это и распределять реактивную мощность как можно более эффективно. Особое значение имеют системы, позволяющие управлять генерируемой реактивной мощностью практически без инерции. Они включают использование реакторов с магнитной коммутацией и искусственно переключаемых вентилей, емкостных устройств, соединенных параллельно, и управляемой индукции. Основное преимущество этих компенсаторов заключается в том, что они не имеют вращающихся частей, и выработкой реактивной мощности можно управлять плавно с малой или нулевой инерцией.
Рисунок 45. Схема статической коррекции коэффициента мощности, состоящей из управляемого реактора и блока подъемных конденсаторов. На рисунке 45 показано управляемое ферромагнитное устройство, которое представляет собой устройство статической коррекции коэффициента мощности, состоящее из управляемого реактора с параллельно встроенным блоком повышающих конденсаторов. Регулируемый реактор представляет собой электромагнитное устройство, индуктивность которого непрерывно регулируется путем подачи постоянного тока на ферромагнитный сердечник по принципу магнитного усилителя. К одной из катушек дросселя подключен повышающий конденсатор, который также служит для устранения высших гармоник. Использование искусственной коммутации в системах статической компенсации, основанной на применении электронной техники, открывает новые возможности для быстрого управления реактивной мощностью и достижения высоких динамических характеристик систем компенсации реактивной мощности в электрических сетях. В настоящее время важно определить области, в которых наиболее эффективно могут быть использованы различные системы, регулируемые источники реактивной мощности (IRM) и их технико-экономическое сравнение с современными компенсаторами и регулируемыми конденсаторными установками.
Создание такого быстро управляемого ИРМ позволит существовать установкам, обеспечивающим возможность безынерционного изменения различных реактивных параметров электрических систем. Установки IRM могут быть эффективным средством обеспечения стабильного напряжения в сетях, питающих сильно колеблющиеся нагрузки на металлургических заводах с прокатными станами, наличие которых недопустимо снижает качество напряжения. Статический прибор IRM состоит из блока конденсаторов и специальной схемы управления индукцией с полупроводниковыми затворами. Общая реактивная мощность такого устройства, Qk, изменяется за счет переменной составляющей реактивной мощности реакторов, которая вычитается из постоянной составляющей реактивной мощности конденсаторного блока, Qc, в то время как напряжение сети Uc остается постоянным: Qk = Qc — QL. Емкости конденсаторного блока и реакторов выбираются соответствующим образом. В этом случае при закрытых клапанах в сеть подается максимальная мощность, соответствующая емкости конденсаторного блока.
Рис. 46. Схема управляемого источника статической реактивной мощности (СРМ) с искусственным стробированием. На рис. 46 показана принципиальная схема управляемого статического ИМС, в котором каждая фаза состоит из индуктора и двух управляемых затворов, соединенных параллельно. Переход схемы из одного режима в другой осуществляется путем изменения величины управляющего напряжения, подаваемого автоматическим регулятором АР на вход электронной схемы управления клапаном.
Транзисторный компенсатор реактивной мощности
Статические компенсаторы реактивной мощности
В экономических условиях рынка необходимо внедрение балансирующих устройств для снижения потерь тока при передаче, повышения надежности электроснабжения и увеличения пропускной способности транзитных соединений между системами.
До разработки статических тиристорных компенсаторов для регулирования напряжения, повышения статической и динамической устойчивости сетей и снижения перенапряжений использовались синхронные компенсаторы или массивы переключаемых конденсаторов и реакторов. Установка шунтирующих реакторов и конденсаторов в энергосистеме помогла улучшить параметры реактивной мощности сети, но не позволила быстро и непрерывно регулировать реактивную мощность (RPM).
В современных энергосистемах компенсационные устройства для основного источника питания приобретают все большее значение для постоянного поддержания требуемого баланса основного источника питания. Статические устройства коррекции коэффициента мощности (ККМ) — это устройства, отвечающие высоким требованиям к быстрому и плавному регулированию. Статические тиристорные компенсаторы все чаще используются в энергосистемах для регулирования напряжения на стороне нагрузки 1. Важность надежного и эффективного управляемого статического коэффициента мощности (СКМ) очевидна 2. Определение оптимальных параметров статического тиристорного компенсатора обсуждается в статье 3. Однако для статического тиристорного компенсатора 3 номинальное напряжение тиристорного коммутатора равно номинальному напряжению шин подстанции 4, к которым подключен статический тиристорный компенсатор.
Автор 1 использует в предлагаемой схеме управляемого ИРМ схему управляемой части статического тиристорного компенсатора 4, но номинальное напряжение тиристорного коммутатора в ИРМ может быть установлено во много раз ниже, чем в статическом тиристорном компенсаторе. Для того чтобы зафиксировать особенности выбора параметров оборудования ИРМ, проводится сравнительный анализ установившихся параметров регулируемого ИРМ и статических тиристорных компенсаторов 1 и определяется зависимость от угла открытия тиристора a. Были определены диапазоны регулирования реактивной мощности ИРМ 35, 110 и 220 кВ. Возможно многофункциональное использование статических тиристоров PFC в электрических сетях, в частности, для снижения коммутационных перенапряжений в воздушных линиях 5. Электрическое проектирование статических тиристорных компенсаторов и их оптимизация должны проводиться с учетом требований по снижению коммутационных перенапряжений, если это касается конкретного использования статического тиристорного компенсатора в электрической сети.
Для улучшения динамических характеристик статических тиристоров PFC с цепями компенсации фильтра требуется надежное переключающее устройство для переключения тиристоров во время сильных переходных процессов. В качестве переключающих устройств могут использоваться тиристорные ключи, что в некоторой степени увеличивает стоимость статических тиристоров PFC. Работа нагрузок, содержащих в своем составе нелинейную нагрузку, сопровождается искажением кривых тока и напряжения, которое, согласно ГОСТ 13109-87, вызывается несинусоидальным напряжением kHC. Эти искажения влияют на работу сетей и потребителей, вызывая дополнительные потери мощности и тока в линиях электропередачи и оборудовании, согласование токов и напряжений, сбои в работе компьютеров, средств автоматизации и т.д.
Наличие специальных тиристорных быстродействующих пускателей, которые работают с опережением по времени преобразования фазных конденсаторов и срабатывают при изменении cosφ, увеличивает время их безаварийной работы в конденсаторной системе RBM.
Теория и практика
Реактивная энергия и мощность потребляются чаще при использовании трехфазного асинхронного двигателя, поэтому на этом этапе требуется больше компенсации. По последним данным, 40% потребляется двигателями (10 кВ и выше), 30% — трансформаторами, 10% — инверторами и выпрямителями и 8% — освещением.
Для снижения этого процента используются конденсаторные установки или системы. Однако существует множество подтипов этих устройств. Что такое конденсаторные установки и как они работают?
Видео: Что такое коррекция коэффициента мощности и для чего она нужна?
Для экономии энергии необходимы энергосберегающие системы, компенсирующие энергию и реактивную мощность конденсаторных батарей и современных двигателей. Эти устройства обычно оснащены реле, но также может использоваться контактор или тиристор. Дуговые компенсационные реле используются в домашних хозяйствах. Но на заводах, в трансформаторах (где есть несимметричные нагрузки) тиристоры подходят гораздо больше.
В некоторых случаях можно использовать комбинированные устройства, т.е. устройства, работающие одновременно через линейный трансформатор и реле.
Как может помочь использование модулей:
- Подстанция позволит снизить скачки напряжения,
- Подстанция уменьшит скачки напряжения; электросеть станет безопаснее для электрооборудования; исчезнут проблемы с балансировкой мощности и питания в холодильном оборудовании и сварочных аппаратах,
- Они также очень просты в установке и эксплуатации.
Как установить конденсаторные устройства
Предварительно требуется схема цепи и документы ПУЭ, на основании которых принимается решение о компенсации энергии и реактивной мощности с помощью ДСП. Тогда необходим экономический расчет:
- Сумма энергопотребления всех приборов (это духовки, холодильники, торговые автоматы, холодильные установки и т.д.),
- сумма входного тока в сеть,
- расчет потерь в цепях до и после подачи питания на приборы,
- частотный анализ.
Следующим шагом является выработка части электроэнергии непосредственно в точке ввода с помощью генератора. Это называется центральной балансировкой. Это также можно сделать через настройки cos, electric, schneider, tg.
Но существует также индивидуальная однофазная коррекция коэффициента мощности (или кросс-фазная коррекция), цена которой значительно ниже. В этом случае сглаживающее устройство (конденсатор) устанавливается непосредственно у каждого потребителя электроэнергии. Это оптимальное решение для управления трехфазным двигателем или приводным устройством. Однако у этого типа компенсации есть существенный недостаток — он не регулируется, поэтому его также называют нерегулируемым или нелинейным.
Статические компенсаторы или тиристоры работают за счет взаимной индукции. В этом случае для переключения используются два или более тиристоров. Это самый простой и безопасный метод, но у него есть существенный недостаток — гармоники генерируются вручную, что значительно усложняет процесс установки.
Продольная компенсация
Продольная компенсация осуществляется методом варистора или разрядника.
Продольная компенсация реактивной мощности
Сам процесс обусловлен наличием резонанса, вызванного согласованием индуктивных нагрузок друг с другом. Эта техника и теория компенсации мощности используется, например, в инерционных и тяговых двигателях, в технологии стальных или гармонических машин и также называется искусственной.
Техническая сторона компенсации
Существует большое количество производителей и типов конденсаторных модулей:
- Тиристорные регуляторы,
- тиристорные регуляторы, регуляторы из железного сплава (Чешская Республика),
- резисторы (производство Санкт-Петербург), ребра жесткости из стального сплава (Санкт-Петербург, Чехия), резисторы (Санкт-Петербург, Россия),
- Низкое напряжение,
- резонансные реакторы (Германия),
- модульные — новейшие и самые дорогие на данный момент,
- контакторы (Украина).
Их стоимость варьируется от компании к компании — более подробную информацию см. на форуме по коррекции коэффициента мощности.
Полная мощность (S) указывает на количество оборудования в сети и равна произведению фактических напряжений и токов:
Продольная компенсация реактивной мощности
Коррекция коэффициента мощности также может быть выполнена различными способами. Типичные системы перекрестной компенсации используют конденсаторы для уменьшения эквивалентной характеристики элемента питающей сети на номинальной частоте (рис. 2). Таким образом, последовательно соединенный конденсатор C генерирует реактивную мощность, которая компенсирует часть реакции сети. Это происходит из-за резонанса напряжений на конденсаторе и индукторе, которые вращаются в противоположных направлениях (180°). Разрядник и варистор используются для предотвращения разрушения конденсатора C от перенапряжения.

Рисунок 2 — Продольная компенсация с защитой
Технологии
Традиционно для компенсации реактивной мощности используются фиксированные конденсаторы или механически регулируемые конденсаторы, индукционные катушки или синхронные компенсаторы. Однако в последние десятилетия появились два новых семейства генераторов реактивной мощности с силовой электроникой: статические тиристорные компенсаторы и статические преобразователи с самоподключением.
Для обеспечения точного управления полной реактивной мощностью регулирование компенсатора было основано на тиристорах, как в современных компенсаторах, которые имеют преимущество быстрого времени отклика и более низкой стоимости. Компенсаторы состоят из стандартных генераторов реактивной мощности (реакторов и конденсаторов), управляемых тиристорами для обеспечения быстрого переключения реактивной мощности. Эти компенсаторы можно разделить на две основные категории: конденсаторы с тиристорным управлением (TCC) и реакторы с тиристорным управлением (TUR).
В TKC конденсаторы со ступенчатым регулированием активируются индивидуально с помощью двухсторонних тиристорных переключателей. Каждый однофазный отсек состоит из двух основных частей — конденсаторов и пары тиристорных переключателей. Конденсатор может быть включен с минимальной задержкой при включении тиристора, если напряжение конденсатора и напряжение сети одинаковы. Несмотря на привлекательную теоретическую простоту конденсаторов с тиристорным переключателем, их популярность омрачается некоторыми практическими недостатками: Коррекция коэффициента мощности не является непрерывной, и для каждого конденсатора требуется отдельный тиристорный переключатель. Поэтому строительство экономически нецелесообразно.
В TUR используется двунаправленный переключатель с парой противоположно соединенных тиристоров, соединенных последовательно с индуктором L и шунтирующим конденсатором C (рис. 3). Поскольку для управления используется фазовый угол, получается непрерывный диапазон потребления реактивной мощности. Если угол наклона тиристора увеличивается с 90° до 180°, ток дросселя уменьшается. Это эквивалентно увеличению индуктивности, т.е. уменьшению реактивной мощности, потребляемой дросселем. Основным недостатком такой конфигурации является генерация гармоник, что требует реализации более сложной топологии (с пассивными фильтрами, треугольным соединением или двенадцатиимпульсной конфигурацией).
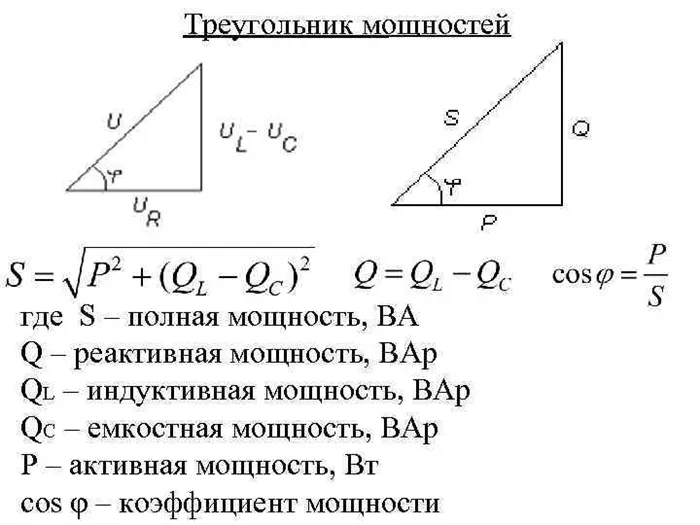
Рисунок 3 — Реакторы с тиристорным управлением (TCR)
Тиристоры также используются для продольной компенсации. Последовательные компенсаторы с тиристорным управлением (TCR) — это технология, которая устраняет некоторые проблемы в динамических системах передачи электроэнергии (рис. 4). TCCA являются отличным средством демпфирования при объединении систем с большим током. Они также уменьшают проблемы подсинхронного резонанса — явления, связанного с взаимодействием крупных генерирующих агрегатов в энергосистеме и компенсацией системы передачи.
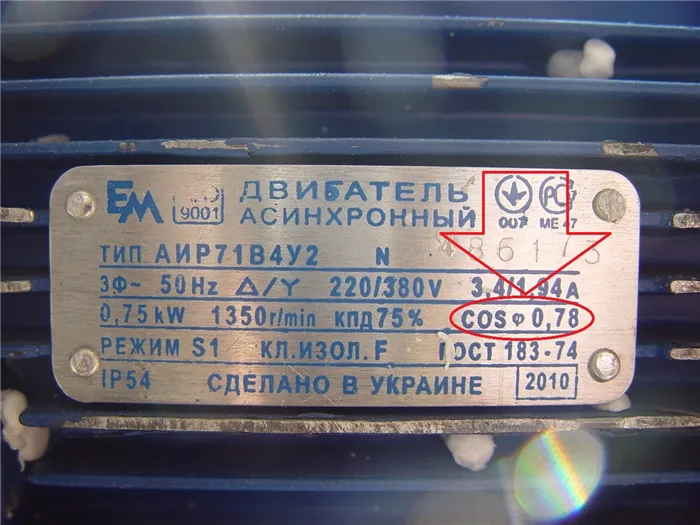
Рисунок 4 — Продольный компенсатор с тиристорным управлением (TPR).
Самокоммутируемые преобразователи
С развитием силовых полупроводников (биполярных транзисторов с изолированным затвором, IGBT) внимание переключилось на переключаемые устройства коррекции коэффициента мощности. Возможны несколько подходов с использованием источника тока и источника напряжения. В инверторе источника тока используется регулируемый реактор постоянного тока, а в источнике напряжения — регулируемый конденсатор постоянного тока. Для самокоррекции коэффициента мощности также используется трансформатор напряжения (Рисунок 5).

Рисунок 5 — Саморегулируемый преобразователь напряжения с IGBT транзистором
Основными преимуществами коррекции коэффициента мощности с помощью автотрансформаторов являются значительное уменьшение размеров, стоимости и гармонических искажений. Саморегулирующиеся компенсаторы для стабилизации сетей электропередачи улучшают регулирование напряжения, обеспечивают правильный коэффициент мощности, а также устраняют дисбаланс нагрузки. Кроме того, они могут использоваться для реализации продольной и последовательной компенсации. На рисунке 6 показаны возможности поперечных компенсаторов реактивной мощности, которые реализуются путем самопереключения в трансформаторе напряжения. Реактивная мощность компенсируется путем изменения амплитуды выходного напряжения Vмодкоторый изменяется с помощью широтно-импульсной модуляции (ШИМ) (рис. 6(a)). С Vмодбольше, чем напряжение на компенсаторе Vкомпбольше, чем V comp, компенсатор генерирует реактивную мощность (Рисунок 6(b)), а при Vмод меньше Vcomp, система коррекции коэффициента мощности потребляет мощность (Рисунок 6(c)). Принцип работы аналогичен принципу работы синхронной машины. Ток компенсатора может быть опережающим или запаздывающим, в зависимости от относительной амплитуды Vкомп и Vмод. Напряжение на конденсаторе VDкоторый подключен к цепи постоянного тока инвертора, остается постоянным и соответствует заданному значению V, определяемому схемой управления.

Рисунок 6 — Ток и напряжение источника, компенсатор поперечной реактивной мощности с самоподключением; (a) — топология компенсатора; (b) — ток и напряжение для компенсации напряжения смещения (Vмод >Vкомп); (c) ток и напряжение для компенсации задержки (Vмод комп).
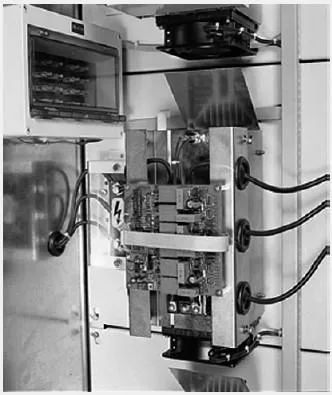
Для коммутации третьего сегмента подходит устройство CM200DU-24H, для коммутации второго сегмента — устройство CM100DU-24H, для первого — CM50DU-24H. Основные параметры выбранных IGBT-модулей приведены в таблице 1.
Компенсация мощности искажения
Гармоники тока, генерируемые нелинейными нагрузками, могут вызвать серьезные проблемы в системах электроснабжения. Гармоники — это токи с частотами, которые кратны основной частоте сети и вызывают искажения мощности. Высшие гармоники тока, накладываясь на основную, приводят к искажению формы сигнала тока. Искажение тока, в свою очередь, влияет на форму волны напряжения сети и оказывает неприемлемое воздействие на нагрузки сети. Увеличение полного значения реального тока при наличии высших гармоник в системе приводит к перегреву всех устройств в распределенной энергосистеме, снижению коэффициента мощности, снижению электрического и механического КПД нагрузок, ухудшению работы выключателей и завышению требуемой мощности автономных электростанций.
Высшие гармоники тока, генерируемые ИБП как объектом с нелинейными входными характеристиками, могут вызвать серьезные проблемы электромагнитной совместимости (ЭМС) в системах бесперебойного питания. Природа возникновения и влияние гармонических составляющих с частотами, кратными частоте сети, описаны в Литературных заметках 1 и 2. Следует отметить, что искажение синусоидального тока также влияет на форму напряжения питания других нагрузок, подключенных к тому же фидеру. Наиболее важными высокочастотными гармониками во входном токе трехфазных систем ИБП с 6-периодным выпрямителем являются 5-я и 7-я гармоники (250 и 350 Гц), а в системах с 12-периодным выпрямителем наиболее значимыми являются 11-я и 13-я гармоники (550 и 650 Гц). Таким образом, ИБП, как объект гарантированной электрической сети, является генератором более высоких гармоник, чем другие объекты системы (сеть или генератор ДГУ). В зависимости от точки подключения к распределительной сети и процента линейных нагрузок, подключенных к той же сети, ИБП может искажать форму волны сетевого напряжения и влиять на другие нагрузки. Максимально допустимые значения гармонических составляющих напряжения в точке общего подключения к сети с номинальным напряжением 380 В, в соответствии с требованием 7, не должны превышать 9 % для пятой гармоники и 5,25 % для одиннадцатой гармоники. Максимально допустимое значение коэффициента искажения синусоидальности сети 380 В не должно превышать 12 %. Это имеет эффект увеличения фактического значения тока, потребляемого из сети, что приводит к увеличению нагрузки на оборудование электрораспределительной сети.
Основные методы подавления гармоник в системах гарантированного электроснабжения включают в себя:
- Реализация пассивного фильтра 5-й гармоники в трехфазных системах ИБП с 6-периодным выпрямителем,
- Использование активных фильтров гармоник в трехфазных системах.
Применение пассивных фильтров
Использование последовательно включенных входных фазовых реакторов в некоторых случаях не позволяет снизить гармонические искажения тока до желаемых пределов. В этом случае целесообразно использовать пассивные LC-фильтры, настроенные на определенный порядок гармоник. Подключение фильтра ко входу выпрямителя с 6 полупериодами при нагрузке 100 % снижает искажение тока до значения 8-10 %. В системе без фильтра коэффициент искажения может достигать 30 % и более. На рисунке 2d показана реализация трехфазного LC-фильтра, используемого в трехфазных системах ИБП.
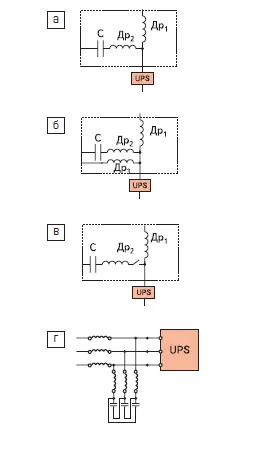
Рис. 2. Пассивные фильтры: a) некомпенсированный LC-фильтр; b) компенсированный LC-фильтр; c) некомпенсированный LC-фильтр с переключателем; d) 3-фазный вариант LC-фильтра.
Существуют следующие типы пассивных фильтров 2:
- LC-фильтр без компенсации,
- LC-фильтр без компенсированного LC-фильтра,
- Некомпенсированный LC-фильтр с переключателем.
Некомпенсированный фильтр содержит последовательный индуктор Dr1 и перекрестный контур, состоящий из последовательного индуктора Dr2 и емкости C, которые настроены на определенную гармонику (рис. 2a). Когда фильтр настроен на 5-ю гармонику, сопротивление перекрестного контура близко к нулю, и ток, получаемый от источника, не содержит этой гармоники. Недостаток такого фильтра заключается в следующем: при использовании в качестве основного источника тока дизель-генераторной установки (ДГУ) с ограниченной установленной мощностью этот фильтр может обеспечить относительно высокое значение емкостной составляющей тока нагрузки (10-30%).
Когда ИБП подключен к ДГУ и выпрямитель запускается плавно, активная мощность, поглощаемая нагрузкой, равна нулю, а генератор ДГУ заряжается только за счет сопротивления емкостного фильтра. Значительная емкостная составляющая тока, потребляемого генератором, может привести к неисправности системы генератора и отключению ДГУ. Поэтому возможность использования некомпенсированных LC-фильтров должна быть проанализирована с точки зрения настройки характеристик генератора и параметров фильтра.
Компенсированный фильтр содержит дополнительную поперечную индуктивность Dr3, которая вносит вклад в индуктивный характер фильтра по отношению к генератору (рис. 2b). Это снижает емкостную составляющую потребляемого тока и облегчает работу генератора в пусковом и установившемся режимах. Однако присутствие Dr3 приводит к снижению коэффициента мощности всей системы.
Некомпенсированный коммутационный фильтр практичен, когда в системе используется DGU с ограниченной мощностью, пропорциональной мощности ИБП. Перекрестный фильтр включается автоматически только тогда, когда ИБП достигает своей номинальной мощности (рис. 2c), поэтому не требуется установка ДГУ больших размеров и не снижается коэффициент мощности системы.
Применение активных фильтров гармоник
Активный фильтр гармоник (AFG) 2 подключается параллельно нелинейной нагрузке (рис. 3) и в различных источниках также называется «активный кондиционер гармоник, ACG».

Рисунок 3. Схематическое изображение интеграции активного кондиционера гармоник.
Принцип работы AFG основан на анализе гармонических токов нелинейной нагрузки и генерации таких же гармонических токов в распределительной сети, но в противоположной фазе. Следовательно, более высокие гармоники тока гасятся в точке подключения AFG. Это означает, что они не передаются от нелинейной нагрузки в сеть и не искажают напряжение первичного источника тока.
Нелинейный ток нагрузки содержит основной ( 1) и высшие гармоникиn ) гармоники:
AFG содержит высшие гармоники, которые противоположны току нагрузки:
В результате ток, получаемый от источника, практически синусоидален, поскольку содержит только основную (первую гармонику):
Таким образом, источник обеспечивает только основную часть тока нагрузки, в то время как AFG по существу охватывает весь диапазон высших гармоник от 2-й до 25-й. AFG может быть установлен в любой точке распределительной сети и компенсировать гармоники от одной или нескольких нелинейных нагрузок. Модели AFG, предлагаемые компанией MGE UPS SYSTEM под названием SineWave, могут компенсировать рабочие гармоники от 20 A до 120 A 2.
На рисунке 4 показаны кривые тока системы AFG, работающей с нелинейной нагрузкой, такой как ИБП с трехфазным мостовым выпрямителем.
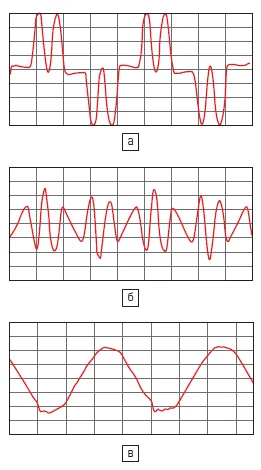
Рисунок 4. Кривые тока в системе с AFG: a) ток нагрузки; b) ток ACG; c) ток источника.
Связь между фактическими значениями токов нагрузки и источника определяется следующим выражением:
В качестве первого приближения можно предположить, что фактические значения тока AFG, необходимого для компенсации высших гармоник, генерируемых нелинейной нагрузкой в распределительной системе, определяются следующей зависимостью:
Более высокое значение тока, вытекающее из выражения (19), можно объяснить тем, что на практике AFG может компенсировать гармоники вплоть до 25-й гармоники.
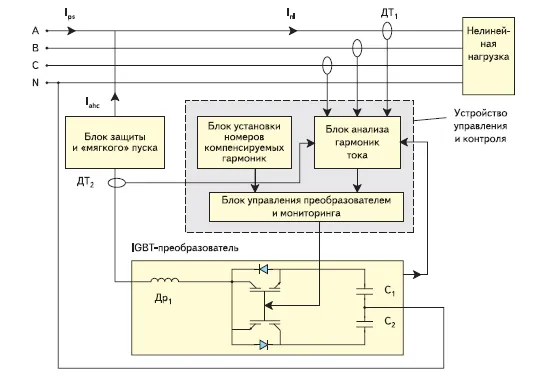
Рисунок 5. Принципиальная схема АФГ (однофазная цепь показана условно).
Диаграмма AFG показана на рис. 5. АФГ включает следующие компоненты: IGBT-трансформатор, блок управления и контроля, блок защиты и плавного пуска и датчики тока. Трансформатор AFG содержит трехфазный преобразователь из IGBT транзисторов, активированных с тактовой частотой 16 кГц, двух конденсаторов C1, C2 и сетевых катушек в каждой фазе (Dr1). Блок управления и контроля состоит из блока анализа тока гармоник, блока установки числа гармоник и блока управления и контроля инвертора.
В качестве первого приближения можно предположить, что фактические значения тока AFG, необходимого для компенсации высших гармоник, генерируемых нелинейной нагрузкой в распределительной системе, определяются следующей зависимостью:
Основные компоненты УКРМ
Конденсаторы используются для компенсации индуктивной составляющей реактивной мощности. Иногда они объединяются в целые батареи и оснащаются различными коммутационными устройствами. Это необходимо для автоматического переключения конденсаторов с целью увеличения или уменьшения их конечной емкости. Кроме того, необходим измеритель Cl.l. для контроля коэффициента мощности cosf и других параметров УКРМ. В настоящее время эти системы управления основаны на микропроцессорах и выполняют всю работу без вмешательства человека.

Емкостная составляющая компенсируется аналогичным образом. Уже здесь современные двигатели или специальные дроссели (катушки, реакторы) выступают в качестве компенсирующих устройств. Емкостная составляющая характерна для длинных кабелей и воздушных линий, а не для самих промышленных установок.
Виды компенсаторов и их принцип действия
Обычно в качестве компенсирующих устройств используются либо конденсаторные батареи, либо двигатели. Можно использовать как один компенсатор, так и несколько компенсаторов, соединенных параллельно.
В течение дня баланс сил в сети может измениться, и RBMC должен реагировать соответствующим образом. В этом отношении компенсаторы могут быть:
- нерегулируемые — без возможности замены компонентов,
- автоматический — компенсатор сам отслеживает cosf, производит расчеты и решает, сколько конденсаторов добавить в цепь,
- ручное управление — человек сам анализирует cosf на основе показаний приборов и осуществляет соответствующее переключение.
В зависимости от условий эксплуатации различают следующие типы распределительных устройств
- Контактор — только статическое включение
- Тиристор — работа в режиме реального времени
- Вакуумные прерыватели — для напряжений выше 1 кВ.
Определение емкости конденсаторов
При проектировании УКРМ следует обратить внимание на расчет емкости и мощности конденсаторных систем. Это важно, поскольку при неправильном выборе этих параметров установка может принести больше вреда, чем пользы энергосистеме. Формула для расчета необходимой мощности конденсатора выглядит следующим образом.
Вот:
- C — мощность конденсаторной установки, F,
- U — напряжение сети, В,
- f — частота, Гц,
- Q — реактивная мощность конденсатора, вар,
- p — 3.14.
В свою очередь, переменная Q определяется следующим выражением.
Где:
- P — активная мощность потребителя,
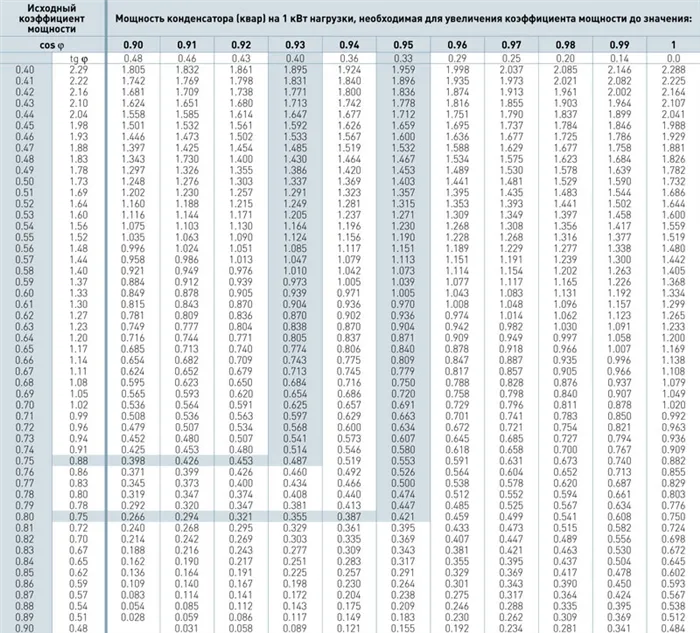
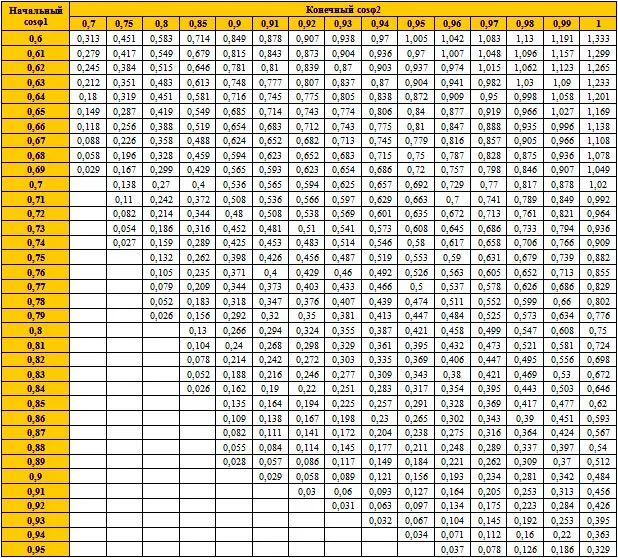
- K — коэффициент вариации, выбирается из таблицы.
Дополнительная информация. В Интернете полно ресурсов с калькуляторами для онлайн расчета различных параметров компенсатора.
Это важно: в интернете есть предложения купить иллюзорную чудо-коробку. Он подключается к розетке и тем самым избавляет дом от излишней реактивной мощности. Отзывы свидетельствуют о том, что внутри этого устройства находятся только светодиоды. Поэтому он никак не способствует энергосбережению.
Постановка задачи
На рисунке 1 показана схема подстанции с коррекцией коэффициента мощности (конденсаторные панели).
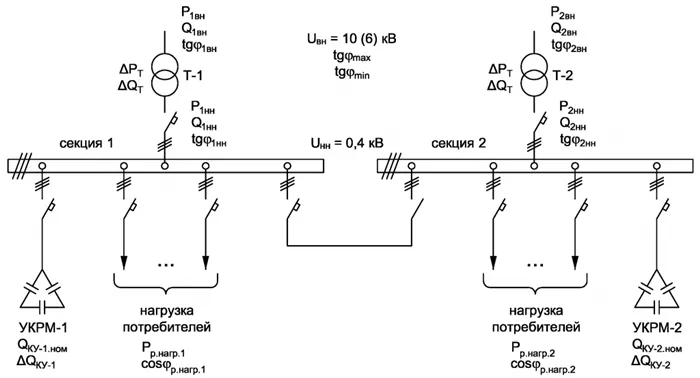
Рисунок 1: Схематическое изображение трансформаторной подстанции.
При нормальной работе трансформаторной подстанции разъединитель обычно разомкнут. Каждая секция шины может рассматриваться как изолированная и рабочие параметры могут быть рассчитаны отдельно. Для упрощения расчетов мы предполагаем, что режимы энергопотребления в обоих сегментах симметричны и имеют следующие характеристики:
- Pп.р.а.р.1 = PП.А.Р.А.2. = Pr.onr. — расчетная активная мощность нагрузки,
- cosϕп.р.а.р.1 = cosϕП.А.Р.А.2. = cosϕr.onr. — Коэффициент мощности расчетной нагрузки,
- QPE-1.nom = Q1.ном DK-1.ном DK-2.ном = QPM.nom — Номинальная мощность блока коррекции коэффициента мощности (RCCU),
- ΔQТЭЦ-1 = ΔQТЭЦ-2 = ΔQКУ — Мощность управляющего каскада РБМК,
- UНН — Номинальное напряжение стороны низкого напряжения (НН),
- P1HH = P2HH = PНН = Pr.onr.— Номинальная активная мощность на низковольтных шинах,
- Q1HH = Q2HH = QНН — Оценка реактивной мощности на низковольтных шинах,
- tgϕ1HH = tgϕ2HH = tgϕНН — расчетный коэффициент реактивной мощности на низковольтных шинах,
- ΔPТ — потери активной мощности в трансформаторе,
- ΔQТ — потери реактивной мощности в трансформаторе,
- UВН — номинальное напряжение высоковольтной стороны (ВН),
- tgϕmax (tgϕmin) — максимальное (минимальное) значение номинального коэффициента реактивной мощности на шинах ВН,
- P1BH = P2VH = PВН — Номинальная активная мощность на шинах высокого напряжения,
- Q1BH= Q2VH = QВН — Проектирование реактивной мощности на высоковольтных рельсах,
- tgϕ1BH = tgϕ2VH = tgϕВН — расчетный коэффициент реактивной мощности на шинах ВН.
Назначение: Расчет номинальной реактивной мощности (QPM.nom) и этап управления (ΔQКУ) УКР.
Расчет мощности УКРМ
Коэффициент реактивной мощности на стороне ВН определяется следующим образом:
Потребляемая активная мощность на шинах ВН представляет собой сумму активной мощности нагрузки и потерь активной мощности в трансформаторе:
Реактивная мощность, потребляемая на шинах ВН, представляет собой сумму реактивной мощности нагрузки и потерь реактивной мощности в трансформаторе за вычетом расчетной мощности компенсатора:
Мы хотим выразить реактивную мощность нагрузки через известные значения (см. рис. 1):
Потери активной и реактивной мощности в трансформаторе зависят от передаваемой мощности и рассчитываются по формулам (7) и (8):
где ΔPxx — потери мощности холостого хода (в соответствии с техническим паспортом), кВт,
ΔQμ — потери реактивной мощности холостого хода трансформатора, квар,
ΔPквар. (ΔQквар.) — активные (реактивные) потери нагрузки на трансформатор, кВт (квар),
ΔPк — потери мощности короткого замыкания трансформатора (данные прохода), кВт,
SНН — полная потребляемая мощность на низковольтных шинах, кВ*А:
SТ — полная мощность трансформатора, кВ*А,
Iхх — ток разомкнутой цепи трансформатора, %,
Uк — напряжение короткого замыкания трансформатора, %.
Следует отметить, однако, что расчеты по уравнениям (7) — (9) являются приближенными, поскольку на данном этапе мы имеем QНН поскольку расчетная реактивная мощность компенсатора QQU.pсм. формулу (4). В этом случае это возможно:
- предположим, что QQU.p= 0 и выполнить расчет без балансировочного устройства,
- предположим, что QQU.p = Qr.onr. и выполнить расчет с полной компенсацией реактивной мощности на низковольтных шинах (этот вариант рекомендуется из-за меньшей погрешности расчета первой итерации расчета потерь в трансформаторе).
Подстановка выражений (3), (4) и (5) в (2) дает выражение для расчета коэффициента реактивной мощности на высоковольтных шинах, где вторым неизвестным является значение реактивной мощности системы компенсации QКУ:
Поскольку максимальный коэффициент реактивной мощности на высоковольтных шинах является номинальным, должно выполняться следующее условие:
Выполнение условия (11) является необходимым в соответствии с требованиями законодательства, но недостаточным, так как коэффициент реактивной мощности может иметь отрицательное значение. На самом деле, если (10) QQU.p настолько велика, что доля счетчика отрицательна, перекомпенсация реактивной мощности QВН< 0 (генерацию в сеть высокого напряжения) и tgϕВН < 0. Перекомпенсация реактивной мощности также нежелательна, как и недокомпенсация, так как в сети опять появляются дополнительные потери мощности и энергии в электрической сети и возрастают капитальные затраты на её строительство. Таким образом, наряду с максимальным значением коэффициента реактивной мощности должно задаваться его минимальное значение tgϕmin. В отсутствие нормативных требований к tgϕmin его стоимость может быть определена с помощью следующих оценок:
- Если производство реактивной мощности в сети HT не разрешено, tgϕmin = 0;
- если заданный уровень потерь мощности и энергии в сети не должен быть превышен и установка должна работать в номинальных условиях (допускается перекомпенсация), tgϕmin = -tgϕmax.
Выбор ступени регулирования УКРМ
Конденсаторная батарея содержит ограниченный набор конденсаторов. Конденсаторы могут иметь одинаковую или разную емкость и делятся на группы. Каждая группа имеет свой коммутационный аппарат (контактор) для включения в цепь. Микропроцессорный блок контроля и управления измеряет условия тока и напряжения и выбирает комбинацию имеющихся групп конденсаторов для достижения требуемого коэффициента реактивной мощности. Очевидно, что управление реактивной мощностью в RBMC является дискретным. Минимальное значение переменной величины реактивной мощности устройства управления реактивной мощностью называется ступенью управления ΔQ.КУ. Чем меньше ступень управления, тем сложнее и дороже управление RBM, поскольку увеличивается количество групп конденсаторов и коммутационных устройств, но тем точнее оно поддерживает определенный коэффициент реактивной мощности.
Поэтому при выборе RBM, помимо номинальной мощности, необходимо определить значение ступени регулирования. Шаг управления должен быть достаточно мал, чтобы поддерживать коэффициент реактивной мощности в заданном диапазоне, см. (12), не увеличивая при этом без необходимости размер и стоимость УКР.
Для пояснения, значения QКУ, QТЭЦ.min и QТЭЦ.max на числовой оси Q для текущего состояния нагрузки (не расчетного) в фиксированный момент времени (см. рис. 2, а).
Текущий режим нагрузки отображается значениями:
- Pквар.(Qквар.) — активная мощность (реактивная мощность) нагрузки,
- cosϕквар. — Коэффициент мощности нагрузки,
- QКУ — реактивная мощность, вырабатываемая ТЭЦ,
- QТЭЦ.min и QТЭЦ.max — это предельные значения реактивной мощности RBMC для текущего состояния нагрузки.
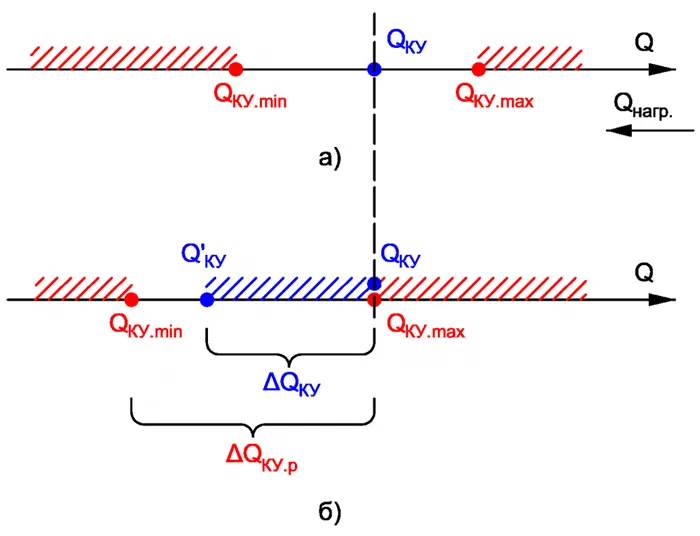
Рисунок 2. Представление реактивной мощности РБМК в режиме тока.
a — до переключения ступени управления; b — во время переключения ступени управления.
Значение QКУ лежит между QТЭЦ.min и QТЭЦ.maxтак, чтобы коэффициент реактивной мощности tgϕВН находится в допустимом диапазоне значений. Если реактивная мощность нагрузки Qквар. превышает значения QТЭЦ.min и QТЭЦ.max начинают уменьшаться, см. (5), (16) и (17). Таким образом, они смещаются влево по оси Q до тех пор, пока QТЭЦ.maxне достигнет значения QКУ (см. рис. 2, б). При дальнейшем снижении Qквар. Q значениеКУ превышает допустимый диапазон. В этот момент RBM уменьшает генерируемую реактивную мощность QКУ со ступенью управления ΔQКУ на Q’КУ. Значение управляющего каскада, конечно, не должно быть больше, чем разница между QТЭЦ.max и QТЭЦ.min. Аналогичные оценки могут быть сделаны, если реактивная мощность нагрузки Qс нагрузкой ..
Таким образом, расчетное значение регулирующего каскада компенсирующего устройства определяется выражением:
Подстановка выражений (16) и (17) в (21) дает формулу для расчета этапа управления УР: