Самый захватывающий вариант получения квадрокоптера – индивидуальный расчет конфигурации и подборка соответствующих ему комплектующих, с монтажом всего этого в одну конструкцию. Приобрести же необходимые элементы можно, к примеру, на торговой площадке E-Bay или AliExpress, сделав заказ через интернет. Использование дронов на законных основаниях
Квадрокоптер для человека
В большинстве случаев квадрокоптер ассоциируется у рядового человека с развлечениями, возможностью эффектной съемки с воздуха, решением ряда задач органами МЧС, полиции, лесоохранных и других организаций. Изредка в интернете появляется информация о попытке в крупных городах организовать доставку различных товаров на дронах. В каждом из этих случаев максимальный вес полезного груза, поднимаемого на квадрокоптере не превышает пяти килограммов, но что если его значительно увеличить и, например, организовать перевозку людей?
Подобное решение может радикально изменить весь рынок пассажирских перевозок, позволяя ускорить движение транспортных средств в крупных городах, создать сферу «воздушных такси» для полетов на малые расстояния. Дополнительно подобная техника решит ряд задач с эвакуацией людей из зон бедствия, возможность безопасного вывоза из труднодоступных мест больных и раненных, доставкой грузов и так далее.
Сложности проектирования и изготовления дронов для полетов человека
С теоретической точки зрения особых проблем с конструированием квадрокоптеров для перевозки человека своими руками не возникает, но на практике есть ряд следующих сложностей и проблем:
Наличие мощных аккумуляторных батарей
На сегодня отсутствуют конструктивные решения, обеспечивающие при малом весе батареи высокую емкость, долговечность и отдачу тока, что ведет к резкому утяжелению всей конструкции для полетов человека по воздуху. В реальности современные прототипы для перевозки людей могут двигаться по воздуху со скоростью 130 км/час не более 20-25 минут, что признается пока неудовлетворительным показателем.

Многие эксперты сходятся на необходимости поиска принципиально новых принципов работы батарей, что необходимо не только для полетов дронов, но и для наземного электротранспорта, повысив длительность поездки без зарядки на электроавтомобиле.
Законодательные моменты
Во многих странах мира действуют очень жесткие правила по использованию воздушного пространства, что обусловлено борьбой с терроризмом, условиями обеспечения безопасности полетов, сохранением тайны личной жизни и другими моментами.
Появление реальных коптеров для перевозки людей автоматически потребует разработки нового законодательства, а это время.
Уровень безопасности
Развитие нештатных ситуаций на высоте и столкновения могут привести к серьезным травмам и летальным исходам, поэтому необходимо внедрение соответствующих компенсаторных антиаварийных механизмов, внедрение ПО для исключения человеческого фактора, что предупредит столкновения во время полета.
Высокая стоимость
Отсутствие эффекта масштаба и технические проблемы, про которые уже шла речь выше, автоматически повышают цену на подобные дроны. По оценкам экспертов, Scorpion 3 российского производства, который имеет эффектный вид, но далеко не лучшие технические характеристики, обойдется покупателю примерно в 150 000 долларов, то есть про массовое использование подобных квадрокоптеров на сегодня просто нереально.

В итоге на сегодня конструкторы и стартапы специализируются на поиске оптимальных вариантов создания больших дронов для людей в теоретической сфере, периодически предлагая миру свои разработки и прототипы. Именно они смогут в будущем стать базой для выпуска первых серийных моделей, которые будут использоваться на практике.
Основные прототипы квадрокоптеров для полета человека
На сегодня существует несколько прототипов больших дронов, которые смогут осуществлять перевозки пассажиров. Одним из достойных вариантов остается Scorpion 3, созданный российским стартапом. Это уже третий вариант гибрида квадрокоптера и мотобайка, который имеет следующие характеристики:
- максимальная высота полета – 3 метра;
- максимальный вес – 250 кг;
- скорость движения – до 50 км/ч;
- продолжительность движения – 27 минут.
Еще одной и весьма серьезной попыткой создать городской воздушный транспорт для человека стал проект Ehang-184 от одноименной компании из США. Этот дрон обеспечивает комфортные и безопасные условия во время полета, значительно мощнее, что подтверждают следующие характеристики:
- максимальная высота подъема – 3.5 км;
- предельно допустимый вес – 200 кг;
- максимальная скорость – 100 км/ч;
- продолжительность полета – 23 минуты.

Весьма интересной с конструктивной точки зрения стала летающая доска от компании Zapata Racing. Подъем в воздух осуществляется с помощью четырех двигателей мощностью в 250 лошадиных сил, а для управления используется пульт дистанционного управления. В качестве источника энергии дрон использует авиационный керосин, находящийся в баке. Последний имеет вид ранца и находится за спиной пилота. Максимальная скорость подобного прототипа составила 55 км/ч, высота подъема 30 метров, а продолжительность полета не превышает 4 минут.

Еще одной интересной новинкой остается гибридный квадрокоптер от компании Top Flight Technologies, который может находиться в воздухе уже несколько часов, а это возможность перемещения на большие расстояния без дозаправки. Единственным исключением становится только ограничение максимального веса на уровне 15 кг, хотя уже совсем скоро производитель планирует довести этот параметр до 100 кг.
В качестве привода дрона используется гибридная силовая установка, которая вырабатывает энергию для электродвигателя мощностью 10 кВт. Для работы установки имеется бак на 18,9 литров топлива, а также литий-полимерная аккумуляторная батарея емкостью 6000 мАч. Максимальная скорость аппарата составляет 64 км/ч.

Интересно, что управлять дроном можно на расстоянии до 3,2 км, а снимать телеметрические показатели на удалении в пределах 15 километров.
Также рама может быть оснащена складными лучами, но это уже очень дорого, и не очень нужно. Можно попробовать реализовать это самостоятельно.
Сфера применения
Использовать quadrocopter можно и для серьезных целей. Оснащенный видеокамерой и передатчиком, он может передавать изображения с воздуха отслеживаемых объектов. К примеру, местонахождение голов скота на пастбище или состояние крыш и высоких памятников.
В его силах разведывать ледовые или сплавные заторы рек, передавать информацию о пробках и ситуации на дорогах. квадрокоптер используется и при лесных пожарах, давая обзор направления движения огня. В общем, везде, где есть необходимость получения панорамной картинки с высоты – он первый помощник. Включая сферы спасения жизни и поиска людей.

Из остальных очевидных методов применения дрона – переноска им по воздуху каких-либо грузов. Летательному аппарату не страшны плохие дороги или их полное отсутствие, а удаленное управление позволяет использовать его в любую погоду без риска для жизни пилота. Квадрокоптер с грузом
Есть и не очевидные способы применения квадрокоптеров. К примеру, в некоторых крупных торговых центрах летательные аппараты подобного типа производят замену ламп освещения под потолком. Захват выполняется в специальный держатель, после чего дрон вращается, выкручивая светильник, и транспортирует его на землю. В него устанавливают целую лампу, которая перемещается вместе с аппаратом по воздуху обратно и вкручивается. В результате – нет риска для персонала, а работа выполнена.
Самодельный квадрокоптер
Можно, конечно, купить дрон в сборе, но это не так интересно, как создать его своими руками, пусть уже и из готовых комплектующих, поставляемых наборами от производителя. К тому же, далеко не каждая готовая сборка будет соответствовать нуждам покупателя.

Самый захватывающий вариант получения квадрокоптера – индивидуальный расчет конфигурации и подборка соответствующих ему комплектующих, с монтажом всего этого в одну конструкцию. Приобрести же необходимые элементы можно, к примеру, на торговой площадке E-Bay или AliExpress, сделав заказ через интернет. Использование дронов на законных основаниях
Один из нюансов, учитываемый при изготовлении самодельного квадрокоптера, – ограничения, введенные законодательно на сверхлегкие летательные аппараты. К которым относятся и дроны.
В сущности, они касаются только документальной регистрации квадрокоптеров весом свыше 250 грамм. Если аппарат имеет большую массу, но меньшую 30 килограмм, то ему требуются разрешительные бумаги от Федерального агентства воздушного транспорта. Получить их можно и по почте, отправив фотографию беспилотного летательного аппарата и его характеристики в Росавиацию.
Какие есть варианты?

Итак, рассмотрим все возможные варианты приобретения или самостоятельного изготовления маленького летательного аппарата, годного как в качестве игрушки, так и для выполнения вполне серьезных задач. Квадрокоптер в полете
Ready to fly (готовый к полету)
Под определение попадают все квадрокоптеры, продаваемые в собранном состоянии. После покупки, для их использования достаточно подать питание на узлы аппарата и пульт радиоуправления. Самый простой способ приобщения к пилотированию.
Almost Ready to Fly (почти готовый к полету)
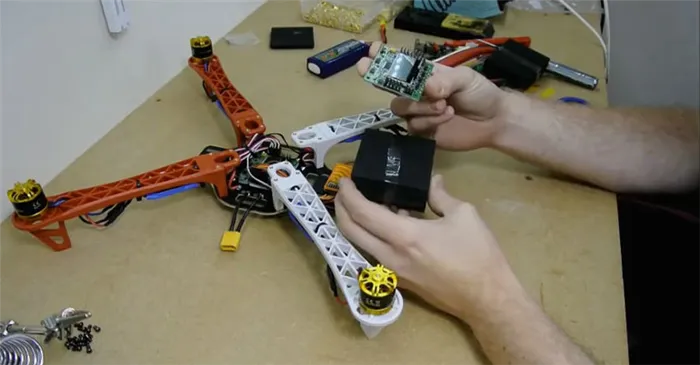
Товарная номенклатура подобных моделей весьма велика. Производитель может представлять как все необходимые детали в наборе, так и только некоторые части дрона. К примеру, раму или контроллер работы двигателей. Сборка и покупка недостающих полностью осуществляется силами владельца такого комплекта.

Приобретение подобного квадрокоптера рекомендуется начинающим пользователям. Он позволит ввести человека в основы создания летательного аппарата, при этом достаточно прост в сборке. Один из вариантов комплектов сборки
Полная сборка с нуля
Один из самых интересных вариантов, с относительно низкими затратами труда и времени. При выборе компонентов летательного аппарата производят расчеты в зависимости от желаемых характеристик и доступной номенклатуры в продаже.
Имеется в виду, к примеру, что для большого квадрокоптера нужны и габаритные, а также мощные запчасти. Их характеристики непосредственно зависят от планируемого веса дрона. Чем крупнее рама – тем больше масса аппарата, а значит, он должен быть оснащен более высоко оборотистыми двигателями, крупными пропеллерами, а также соответствующей системой питания всей силовой и обычной электроники на борту.
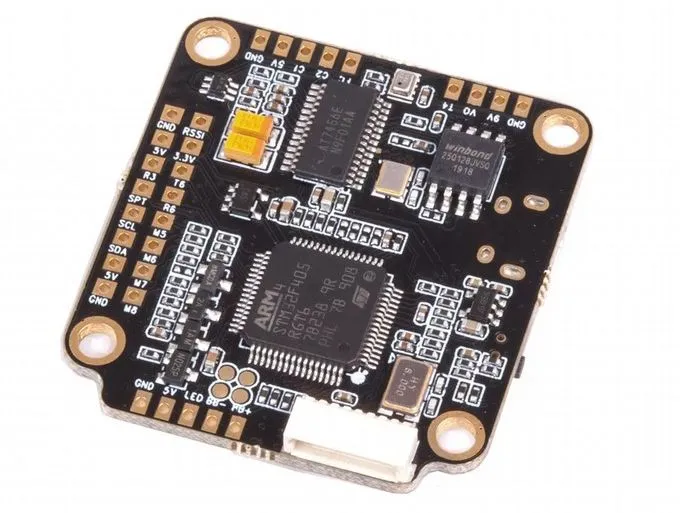
Важной деталью служит и выбор контроллера, который управляет всем этим хозяйством. Он задает скорость вращения винтов, не допуская перекосы аппарата во время полета. К его функциям относится и управление движением дрона, в зависимости от команд оператора на земле. Один из видов полетных контроллеров
Не лишним будет контроль характеристик передатчика пульта и устанавливаемого приемника в аппарат. Чем они мощнее, тем на большем расстоянии можно управлять квадрокоптером.
Ну и в конце, навесное оборудование. Без него дрон – не более чем летающая игрушка. А вот смонтировав на его раму камеру с передатчиком, можно найти квадрокоптеру более практичное применение.
Опять же, важна дальность беспроводного функционирования подвеса, его потребляемая мощность (а значит и запас хода батарей всего аппарата). Управляемая камера, с настраиваемым увеличением и яркостью, также даст свой плюс к использованию дрона.
Самодельный дрон из подручных материалов

Полностью самодельная конструкция квадрокоптера
- Несущая рама. Собственно, «корпус», к которому крепятся двигатели с подъемными винтами, аккумуляторы, системы управления, контроллер и подвесное оборудования. Может быть как покупной, так и изготовленной самостоятельно из дерева, ПВХ труб, пластмассы или алюминия. Единственные к ней требования – легкость и прочность.
Человека он, конечно, не поднимет, но даст понять принципы пилотирования, на которых строится авиация, а также возможность управлять, пусть маленьким, но летательным аппаратом.
Пошаговая инструкция по сборке
Давайте условимся на том, что ты прочитал нашу статью про выбор набора для сборки квадрокоптера ,и воспользовался ценнейшем советом – брать раму с платой распределения. Если нет, то провода подключаем сразу к модулю управления.

Для примера рассмотрим сборку из следующих комплектующих:
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления квадрокоптером KK2.1.5 kk21evo
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A
- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver (в комплекте с приёмником и передатчиком)
Размазываем компоненты по столу ровным слоем, и начинаем.
Этап первый. Сборка
- Примерно прикидываешь необходимую длину проводов контроллера, прибавляешь небольшой запас «на криворукость» и обрезаешь их до нужной длины
- Припаиваешь коннекторы к выходам регуляторов, чтобы потом проще было подключать моторы
- Припаиваешь регуляторы к плате разводки
- Припаиваешь коннектор аккумуляторного блока к плате разводки
- Прикручиваешь двигатели на лучи коптера. При установке моторов постарайся не сорвать резьбу
- Если коннекторов на двигателях нет, то припаиваешь и их
- Привинчиваешь лучи с двигателями к плате
- Крепишь регуляторы к лучам дрона. Не важно чем, но удобнее всего пластиковыми хомутами
- Подключаем провода регуляторов к двигателям в произвольном порядке. Если будет нужно – потом изменим
- Закрепляешь на корпусе модуль управления (предварительно сфотографировав тыльную часть. Пригодится). Снова хоть на жвачку, но советую пока использовать мягкий двухсторонний скотч
- Подключаешь регуляторы оборотов к контроллеру. В те порты, которые отмечены (+ — пусто), обычно подключается белым проводом к экрану
- Остатками скотча закрепляешь приёмник как можно ближе к блоку управления, и подключаешь нужные каналы к нужным портам. Используй документацию своего приёмника и фото тыльной стороны платы, чтобы разобраться какая пачка проводов за что отвечает
- Подключишь питание устройства от батареи, через коннектор
- Profit! Ты собрал свой квадрокоптер
Этап второй. Отладка

- Запускаешь двигатели (тут обычно всё по-разному, так что снова смотри документацию)
- Немного прибавляешь газ, и смотришь в какую сторону вращаются пропеллеры. Они должны вращаться так, как указано в схеме, которая прилагается к контроллеру. Иначе управление будет инвертироваться. Если что-то не так, то просто переворачиваешь коннектор, который соединяет двигатель и контроллер
- Когда всё вращается правильно – прикручиваешь верхнюю деталь рамы. Не заталкивай её на своё место. Если она встаёт туго, значит что-то пошло не так. Ослабь нижние винтики, а после установки затяни всё равномерно
- Закрепляешь блок с аккумуляторами
- Монтируешь адаптеры для пропеллеров на моторы
- Устанавливаешь пропеллеры, учитывая направление вращения моторов. Приподнятая часть лопасти должна смотреть в направлении вращения
- Готово.Твой коптер готов пережить первое включение!
Заключение
Напоследок хочется внести в этот текст немного морали. Любое подобное занятие, будь то проектирование, или просто сборка – является мощнейшим образовательным инструментом. Главное, это просто начать. Ты начнёшь понимать многие тонкости, и научишься концентрировать внимание на важных моментах. Это относится не только к сборке коптеров.
Тебе придётся научиться искать информацию, гуглить, и разбираться в массе вещей. Они тебе не пригодятся в жизни, но ими ты не слабо прокачаешь интеллект. Дерзай, учись, развивайся, и не бойся экспериментировать!
Кстати, расскажи в комментах о том, что ты думаешь об этой теме. Также можешь подписаться на наши группы (кнопки внизу). Тебе не сложно — мне приятно. Удачи, пилот, и да прибудет с тобой подъёмная сила.
Более прочный материал — дюраль (Д16Т). Практически не гнется, достаточно пружинистый, и его применяют в авиации. Профили из него в ОБИ не продаются, но можно поймать на Митинском рынке на третьем этаже, на рынке ТВЦ «Строй» тоже были.
Настройка
Теперь необходимо произвести настройку квадрокоптера, чтобы уже при первом полете он случайно не разбился или не вышел из строя.
- Для начала требуется произвести запуск моторов. Тут бывает по-разному, поэтому лучше сначала ознакомиться с документацией к двигателям.
- Нажимаем на газ и наблюдаем, куда крутятся винты. Они должны вертеться именно по схеме, что идет в комплекте с контроллером. Если они крутятся в противоположном направлении, то это будет означать инверсию управления. Если что-то идет не так, как требуется, следует перевернуть коннектор, объединяющий мотор с контроллером.
- Если все работает, как требуется, то теперь следует прикрутить верхнюю часть рамы. Тут нужно быть предельно осторожным и не пробовать втолкнуть ее туда. Если она встала очень туго, следует обратить внимание на крепления, ослабить болты снизу, после чего затянуть все осторожно.
- Производим закрепление блока с батареями, осуществляем монтаж пропеллерных адаптеров на моторы.
- Осуществляем монтаж пропеллеров, принимая во внимание вращательную сторону. Приподнятая часть лопасти должна смотреть туда, куда производится вращение.


На этом настройка дрона будет закончена, и квадрокоптер будет готов к первому полету.
Рекомендации
Если говорить о рекомендациях, которые можно дать по сборке рассматриваемого устройства собственноручно, то тут следует все рассчитать максимально точно, если вы решили собирать устройство сами. Размеры всех деталей должны быть правильными, чтобы одна часть не мешала другой и не нарушала работу всего квадрокоптера.
А также не будет лишним обзавестись максимально подробной и четкой схемой и инструкцией по сборке дрона, чтобы устройство функционировало, действительно, так, как требуется.

Кроме того, следует серьезное внимание уделить подбору комплектующих, чтобы они максимально подходили и были высокого качества для повышения долговечности дрона. Особое внимание требуется также уделить аккумуляторам, которые должны быть довольно емкими для того, чтобы устройство могло максимально длительно находиться в воздухе на одном заряде аккумуляторной батареи.
О том, как сделать квадрокоптер своими руками, смотрите далее.
Компоненты выбираем, руководствуясь необходимым результатом. Не нужно брать самое лучшее, если в этом нет необходимости. Возможности своей сборки ты можешь приблизительно рассчитать при помощи калькулятора.
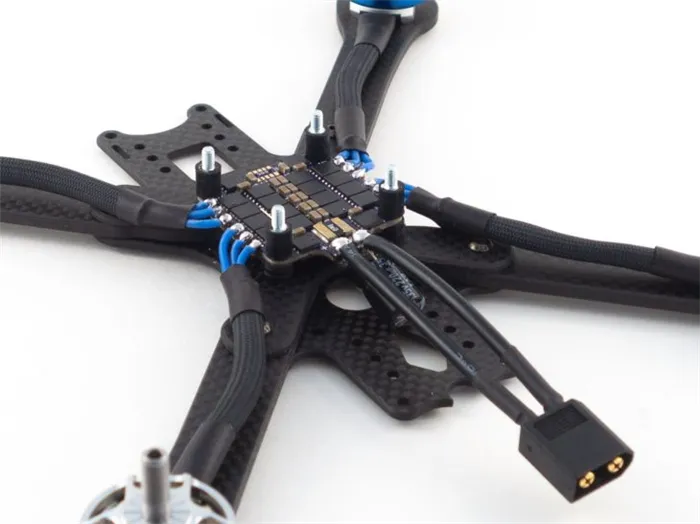
Сборка рамы
Рама идет в комплекте с подробной инструкцией, поэтому особо добавить нечего. Гайки без пластинок антискольжения, поэтому их нужно фиксировать при закручивании.
Обратите внимание на заостренные концы на лучах, они должны быть направлены на внешнюю сторону, чтобы случайно не прикрутить их в обратную сторону.
Для монтажа башни из полетного контроллера и регулятора оборотов (FC и ESC) вместе с рамой идут винты на 15 мм. Также, чтобы отделить раму от регулятора оборотов, в комплекте идут резиновые антивибрационные биты, их нужно вставить между платой и рамой. Как вы поняли, они защитят от вибраций полетный контроллер, так как там установлен гироскоп. Далее, ставите специальные опоры, на которые потом установите полетный контроллер.
Сейчас полетный контроллер ставить еще не нужно! Поставите позже.


Моторы
Хоть это и необязательно, но я использую оплетку для проводов.
Это прибавляет такой брутальности вашему дрону. Можете использовать, например, оплетку диаметром 6 мм, так как 4 мм будет маловата, ссылка будет в конце статьи.
- Отрежьте 4 куска шнура по 7 см и оплавьте концы, чтобы они не распушились. Наденьте оплетку на провода и наденьте на края по куску (2 см) термоусадки, чтобы закрыть концы.
- Прикрутите двигатели к лучам рамы с помощью винтов М3 х 6 мм, предварительно обмазав резьбу синим фиксатором резьбы.
Фиксаторы резьбы продаются в автомагазинах.
- Теперь начните припаивать провода моторов к площадкам на регуляторе оборотов. Старайтесь припаять так, чтобы контактная площадка была полностью в припое. Начинайте паять с дальнего края, к себе.
- Если провода длинные, укоротите их, чтобы они не торчали и потом припаивайте.
- После того, как провода будут припаяны, подвиньте термоусадку к краю и усадите ее зажигалкой или феном.


Провод питания
Контроллер полета идет в комплекте с конденсатором и его тоже нужно припаивать. Конденсатор позволяет сглаживать скачки напряжения и предотвращает помехи на видео.
Убедитесь в правильной полярности контактов (плюс к плюсу, минус к минусу), примерьте его у контактов питания на плате регулятора оборотов, укоротите ножки и залудите (нанесите припой). Теперь возьмите кабель питания и при необходимости тоже залудите. Разместите конденсатор с нижней стороны платы, а кабель питания сверху, чтобы они не мешали друг другу. Припаяйте.
Для такой постройки вы можете скачать чертежи квадрокоптера. Кстати, эта конструкция рассчитана на полеты с фотоаппаратом, именно по этому у нее такие длинные «ноги».
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Немного про радиоаппаратуру. Сейчас практически все передатчики для летающих моделей работают на частоте 2,4 ГГц. Они достаточно дальнобойные, и этот частотный диапазон не так зашумлен, как, например, 900 МГц. Для полета вообще-то достаточно четырех каналов: газ, рыскание, тангаж, крен. Ну а восьми каналов точно хватит и на что-нибудь еще.
Для полетов с камерой обзаведись подвесом, который будет удерживать камеру параллельно горизонту при маневрах, а также поможет управлять наклоном камеры. Большинство контроллеров имеют выходы для стабилизации подвесов с сервоприводом, а также выход для переключателя управления кнопкой спуска камеры.
Комплект обычно состоит из самого пульта и приемника. На приемнике находятся ручки управления и дополнительные кнопки. Обычно выбирают аппаратуру Mode2, когда левый стик управляет газом и поворотом, а правый — наклонами коптера. Все ручки, кроме газа, подпружинены и возвращаются в начальное положение при отпускании. Также стоит обращать внимание на количество каналов. Для беспилотника потребуется четыре канала управления и один канал для переключения режимов полета, кроме того, могут потребоваться дополнительные каналы для управления камерой, для настройки или для особых режимов полетного контроллера. При выборе пульта стоит также учитывать возможность смены радиомодуля, чтобы в будущем его можно было легко обновить.