Элементы 1, 2, 4 формируют оптико-механический подшипниковый узел. Оптический диск (лимб) 4 может быть стеклянным, металлическим, пластиковым. В зависимости от производителя бывают конструкции, где элементы 3 и 5 поменяны местами. Механический редуктор 6 встречается только у многооборотных абсолютных преобразователей.
Назначение и виды энкодеров
Энкодер (преобразователь угловых перемещений) – это электронное устройство, позволяющее с необходимой точностью измерить различные параметры вращения какой-либо детали, как правило, вала электродвигателя или редуктора.
Измеряемыми параметрами могут быть: скорость вращения, угловое положение по отношению к нулевой метке, направление вращения. Фактически энкодер является датчиком обратной связи, на выходе которого цифровой сигнал меняется в зависимости от угла поворота. Этот сигнал обрабатывается и далее подается на устройство индикации или на привод.
Применение энкодеров
Энкодеры широко применяются в промышленном оборудовании в ситуациях, когда необходима точная информация об объекте, который вращается или перемещается. Это может быть лента транспортера с какими-либо деталями или грузами, система измерения длины и проч. Энкодер позволяет цифровым способом узнать точную позицию детали или угол её поворота.
Существуют два вида энкодеров – инкрементальный и абсолютный.
Инкрементальный энкодер по конструкции проще абсолютного и используется в подавляющем большинстве случаев. Данное устройство можно представить как диск с прорезями, который просвечивается оптическим датчиком. При вращении диска датчик включается или выключается в зависимости от того, находится ли он над прорезью или нет. В результате на выходе энкодера формируется последовательность дискретных импульсов, частота которых зависит от разрешения устройства (см. ниже) и частоты его вращения.

Для того, чтобы определять начальное положение (точку отсчета), используется нуль-метка (выход Z, Zero), которая формируется один раз на полный оборот. Для определения направления вращения у энкодеров обычно имеются два выхода (А и В), на которых импульсы сдвинуты по фазе на четверть периода. По разнице фаз можно однозначно определить, в какую сторону вращается вал.
Основным минусом инкрементального энкодера является необходимость непрерывной обработки и анализа сигналов — для этого требуется контроллер и соответствующая программа. Кроме того, чтобы узнать положение инкрементального энкодера после подачи на него питания, необходимо провести инициализацию для поиска нуль-метки.
Абсолютный энкодер имеет более сложное устройство, но позволяет определить угол поворота в любой момент времени, даже в неподвижном состоянии механизма сразу после включения питания. На выходе абсолютного энкодера действует параллельный код Грея, разрядность которого определяет разрешение, а значит и точность показаний датчика.
Основная характеристика датчиков поворота — разрядность. Разрядность энкодера — это количество импульсов за один оборот. Ее также называют разрешением. Как правило, разрешение составляет 1024 за один оборот.
Устройство и виды энкодеров

Как вы уже узнали, энкодер – это поворотный датчик. Самый простой датчик оснащён ручкой, способной совершать поворот, как по стрелке часов, так и против неё. От поворотного угла и направления зависит выдаваемый цифровой сигнал, который информирует либо о том, какое положение приняла ручка, либо её стороне поворота. Обычно у таких энкодеров ручка применяется ещё в виде кнопки.
Датчики поворотного угла подразделяют по следующим критериям:
- Принцип выдачи данных: инкрементный и абсолютный;
- Принцип работы: оптический, магнитный и механический;
Инкрементальный энкодер принцип работы

Имея более простую конструкцию, преобразователь формирует импульсы, благодаря которым устройство приёма информации определяет нынешнее положение объекта, подсчитывая счётчиком число импульсов. Сразу после приведения данного вида ДУПа в действие положение интересующего объекта (вала) неизвестно. Для подключения системы отсчёта непосредственно к отсчётному началу такие датчики оснащены нулевой меткой. Через них валу необходимо пройти после соответствующего включения устройства.
Из недостатков данного вида датчиков можно выделить то, что определить пропуск импульсов от преобразователя не представляется возможным. Это соответственно является причиной накопления ошибки при выявлении поворотного угла объекта (пока он не пройдёт нуль-метку). Для выявления направления поворота используется пара измерительных каналов – косинусный и синусный. В них одинаковые импульсные последовательности перемещены ровно на 90 градусов относительно обоих каналов.
Датчики поворота используют наиболее часто на станкостроительных заводах, в системах точного перемещения, робототехнических комплексах, в измерительных устройствах, где требуется точная фиксация поворотов, наклонов, вращений.
Особенности настроек и подключения
Монтажом энкодеров должен заниматься только профессиональный мастер. Они монтируются обычно на том валу, с которого считывается информация. Применяются переходные муфты для компенсации различия размеров. Корпус энкодера необходимо как можно более прочно закрепить.
Если же речь идет о монтажных работах на полом валу, то требуется прибегнуть к иному методу. В этом случае вал включается внутри датчика и монтируется внутри полой втулки. При этом сам корпус считывающего устройства закреплять не следует.
Если брать самый элементарный случай подключения, то, по возможности, следует подключить выход преобразователя к входу счетного устройства, и запрограммировать его на определенные параметры скорости.
В основном, преобразователи применяются совместно с контроллерами. К преобразователю необходимо присоединить нужные выходы. После этого программой будет автоматически определено, какое положение объект занимает в данный момент времени, какова его скорость, каким ускорением он обладает.
Характеристики
Каждая разновидность энкодера имеет свои особенности и характеристики:
- Величина импульсов, которая производится в момент одного оборота диска в процессе работы. Может варьироваться от 1 до 5 тысяч импульсов.
- Для абсолютных энкодеров важна такая характеристика, как разрядность бит или их количество.
- Тип вала, используемого в устройстве, может отличаться — он бывает с прямой осью или полый.
- Учитывается разновидность используемого фланца на валу под шпонку.
- Сигнал при выходе может отличаться.
- Уровень напряжения питания.
- Используемый тип разъема и длина кабеля.
В зависимости от сложности устройства и возможности выдерживать различные нагрузки, отличается и сфера применения. Простые датчики имеют минимальное оснащение и используются в несложных механизмах. Высокоточные устройства с высокой производительностью, защитой от температурного воздействия или взрывов применяются в промышленности и сложных технических устройствах.
В основном, преобразователи применяются совместно с контроллерами. К преобразователю необходимо присоединить нужные выходы. После этого программой будет автоматически определено, какое положение объект занимает в данный момент времени, какова его скорость, каким ускорением он обладает.
Общие плюсы и минусы
Прежде, чем рассмотреть разные типы энкодеров, стоит сказать об общих преимуществах и недостатках этих датчиков.
- Доступная цена.
- Простой монтаж и использование.
- Высокая точность измерений.
- Универсальность — возможность применения на широком спектре приборов и оборудования.
- Возможность определить направление вращения объекта.
- Возможные ошибки в измерениях, если выбран прибор неправильного типа или нарушена технология установки.
- Схема подключения зависит от типа и сферы применения.
- В некоторых видах энкодеров нужно постоянно преобразовывать код Грея.
- Ограниченная разрешающая способность. Чтобы повысить точность измерений, нужно добавлять дополнительные каналы.
Типы приборов
Устройства бывают нескольких типов. Типы энкодеров: инкрементальные и абсолютные, оптические и механические. Далее будет рассмотрено, что такое энкодер инкрементального типа, а затем обозрены другие типы.
Инкрементальные энкодеры
Они распространены больше всего. В инкрементальном варианте вращательное движение вала преобразовывается в электрические импульсы. Его конструкция состоит из диска с прорезями и оптических датчиков.
Конструкция датчиков поворота данного типа, не позволяет им сообщать свое абсолютное состояние, а только величину изменения положения. Простой образец инкрементального устройства — шайба регулировки громкости автомобильной магнитолы.
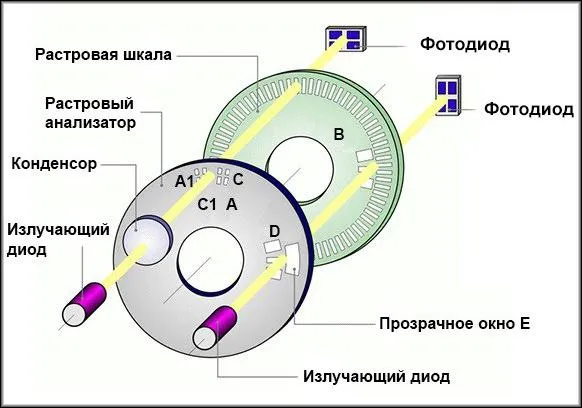
Этот вид работает следующим образом. У него есть начальная нуль-метка, или выход Z, и два дополнительных выхода — A и B. Датчик создает две линии сигналов со смещенными на четверть фазы импульсами относительно друг друга. Разница импульсов указывает на направление вращения, а их количество — на угол поворота.

Разновидность инкрементальных энкодеров — сдвоенные, или квадратурные. Они состоят из двух датчиков, которые срабатывают со смещением в полшага. Квадратурные считают количество импульсов и учитывают направление.
У инкрементальных два главных минуса. Во-первых, нужно постоянно обрабатывать и анализировать сигнал, для чего используют контроллер и специальную программу. Во-вторых, они требуют синхронизации с нулевой меткой после включения. Для этого требуется инициализация для поиска выхода Z.
Абсолютные энкодеры
Датчики такого типа устроены более сложно. Но они позволяют определить величину угла поворота сразу после включения, не требуя синхронизации с нулевой меткой.
В основе конструкции поворотный круг, разделенный на одинаковые по размеру пронумерованные секторы. После включения устройства определяется номер сектора, на котором оно находится. Такое решение позволяет сразу зафиксировать положение, угол и направление вращения.
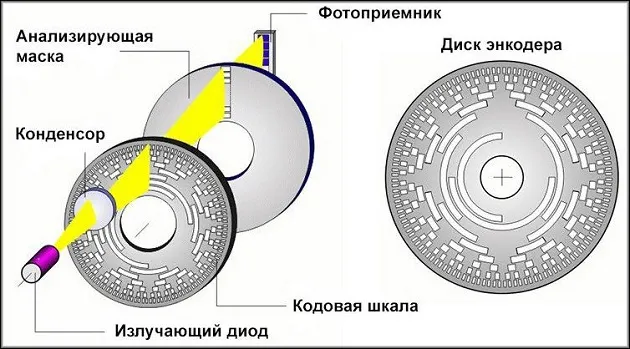
Принцип работы абсолютного энкодера основан на использовании кода Грея для определения текущего положения и других параметров. В них не требуется синхронизация с нулевым значением.
Единственный существенный недостаток этого типа угловых датчиков — необходимость все время переводить код Грея в двоичный код для регистрации положения датчика.
Многооборотные датчики поворота
Абсолютные энкодеры могут быть однооборотными и многооборотными.
Однооборотные показывают абсолютное значение после одного оборота. После этого код возвращается к начальному значению. Такие датчики используют в основном для измерения угла поворота.
Если нужно измерять обороты в системах с линейным перемещением, используют многооборотные энкодеры. В них есть дополнительный передаточный механизм, благодаря чему они регистрируют, помимо угла поворота, количество оборотов.
Оптические энкодеры
Диск оптического энкодера изготавливают из стекла. Отличие этого типа угловых датчиков, в наличии оптического растора, перемещающегося при вращении вала. При этом он создает поток света, который регистрирует фотодатчик.
Единственный существенный недостаток этого типа угловых датчиков — необходимость все время переводить код Грея в двоичный код для регистрации положения датчика.
Виды энкодера
Основные типы, которые на слуху у всех специалистов, занимающихся автоматизацией:
- абсолютные (absolute) – всегда знают свое положение
- инкрементные (incremental) – относительные, считают только при включенном питании и вращении.
С развитием технологии, абсолютные энкодеры занимают все более прочные позиции на рынке. Если раньше соотношение было 70 на 30 и даже 80 на 20 % в пользу икнрементальных, то теперь их позиции равны. А в некоторых отраслях абсолютные преобладают.
Отдельно здесь можно выделить многооборотные энкодеры. Которые не только «запоминают» позицию внутри оборота, но и знают на каком обороте находятся. Количество оборотов зависит от используемого многооборотного модуля. У редукторного механического модуля количество регистрируемых оборотов как правило ограничено 12 (4096) или 14 битами (16384). У модуля со встроенной в энкодер батарейкой – до 18 (262144) и более бит. Многооборотный модуль, построенный на сенсорах Виганда, считает до 31 (2147483648) бит оборотов.
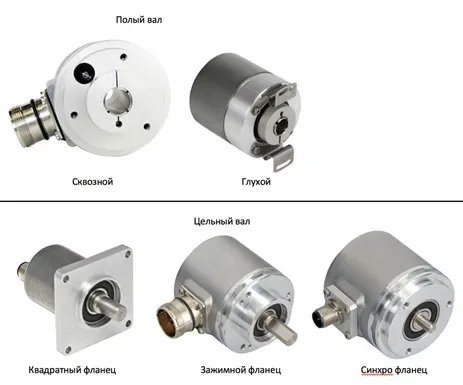
По конструкции выделяют угловые преобразователи следующих типов:
- С полым валом (hollow shaft):
- Сквозным (thru hollow)
- Глухим (тупиковым)(blind hollow).
- Cинхро фланцем (synchro flange)
- Зажимным (clamping)
- Квадратным (square)
- Пилотным (pilot).
Самое полное портфолио энкодеров на рынке вы найдете на сайте f-enco.ru
Применение энкодера
Области применений сегодня настолько обширны, что преобразователь перемещений можно встретить в принтере, метро, самолете, трамвае, строительном кране, лифте, даже на продвинутом дачном участке в качестве датчика открывания ворот. Ниже представлен далеко не полный список применений, где датчики обратной связи получили наибольшее распространение:
- Автоматизация производств
- Упаковка
- Текстильное производство
- Производство продуктов питания и напитков
- Промышленные роботы