В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как уменьшить обороты электродвигателя шкивами
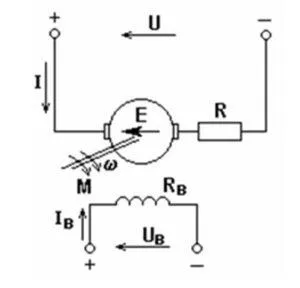
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность – введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов. Это происходит ввиду насыщения обмотки.
Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
Читайте также: Резка керамогранита: как и чем резать в домашних условиях, плитка для пола и фигурная нарезка, плиткорезом
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
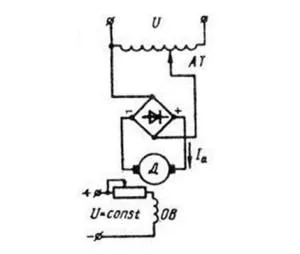
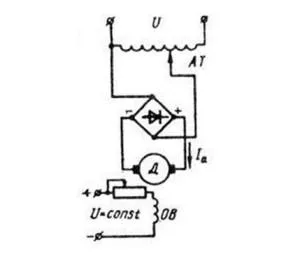
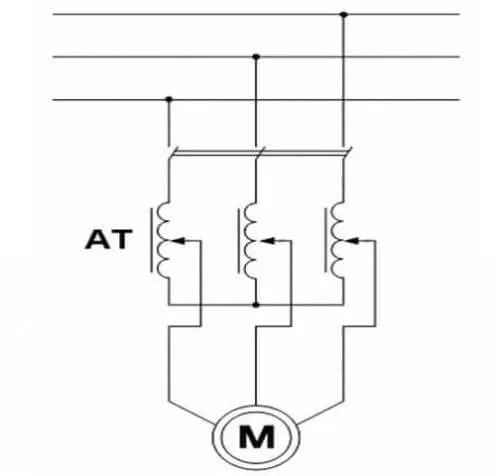
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Простейший вариант
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность – введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов. Это происходит ввиду насыщения обмотки.
Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
В цепи якоря
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
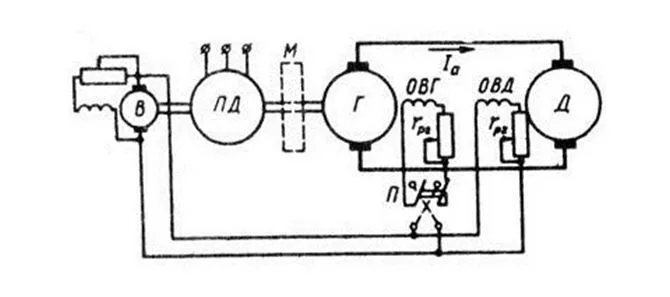
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
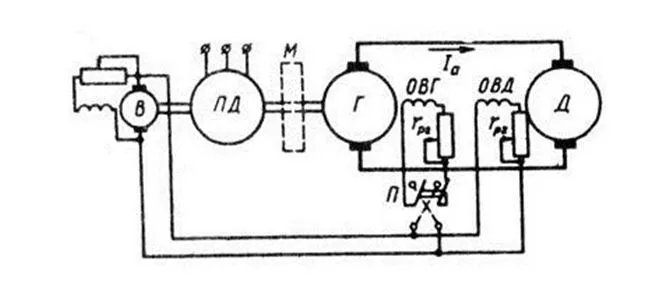
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
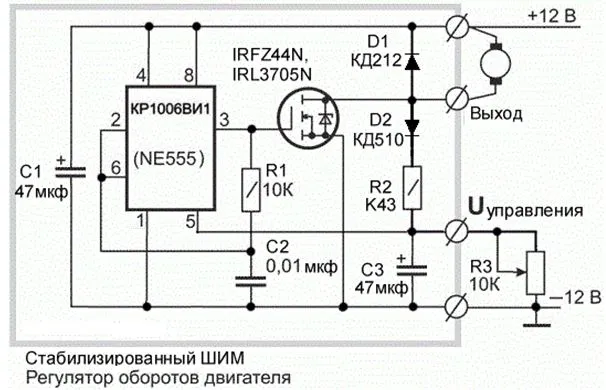
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убрать крутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
Есть еще один вариант, только это уже не для 12, а для 24в питания.
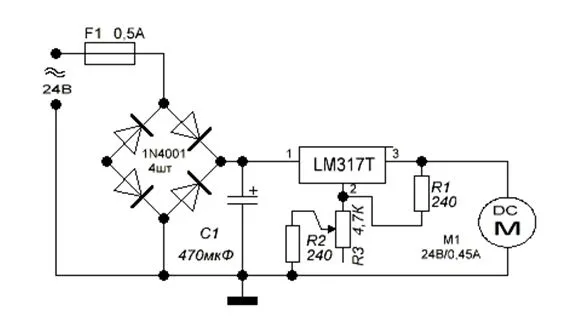
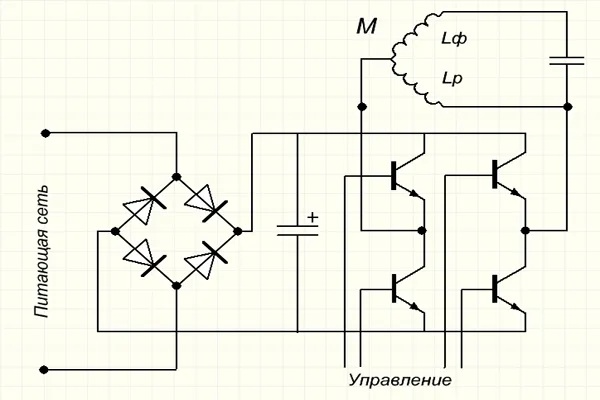
Двигатель постоянного тока, питание – переменное, так как стоит диодный мост. При желании можно мост выбросить и запитывать постоянкой от своего блока питания.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
В цепи якоря
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
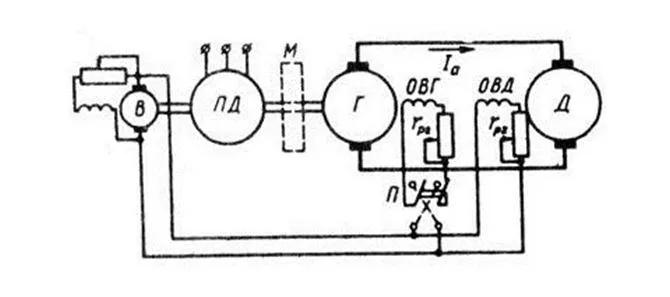
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
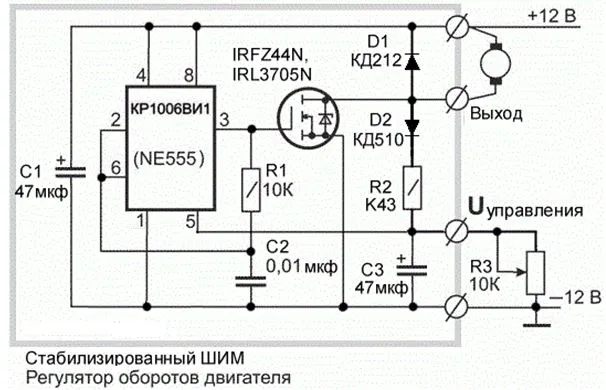
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убратькрутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
Есть еще один вариант, только это уже не для 12, а для 24в питания.
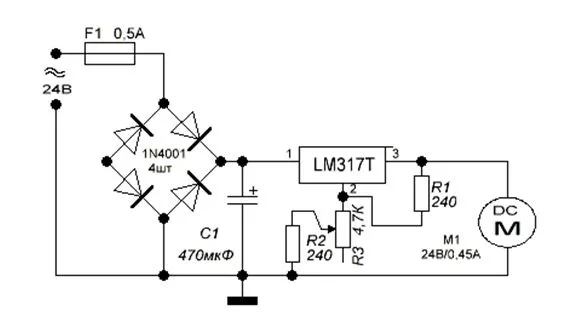
Двигатель постоянного тока, питание – переменное, так как стоит диодный мост. При желании можно мост выбросить и запитывать постоянкой от своего блока питания.
От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения.
Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
Двухфазный двигатель
Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Есть две возможности контролирования числа оборотов:
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
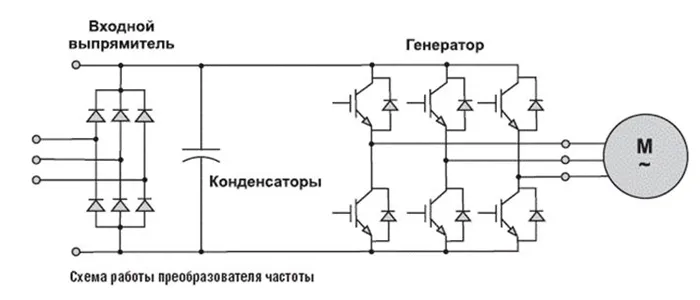
Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
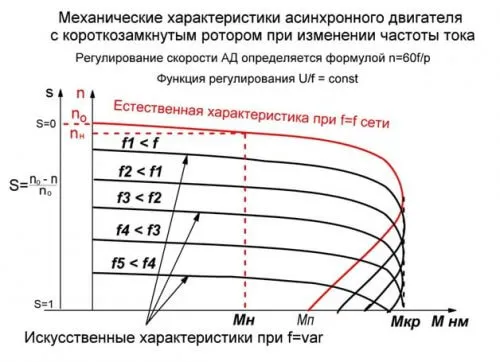
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
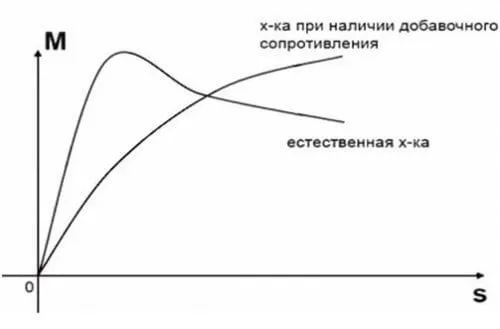
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.

В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
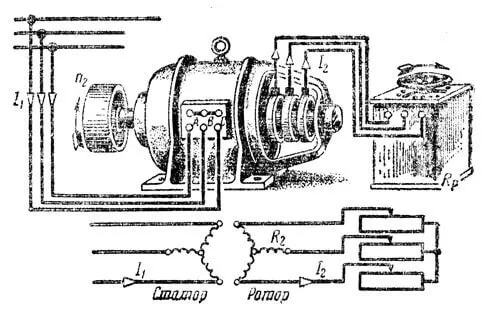
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
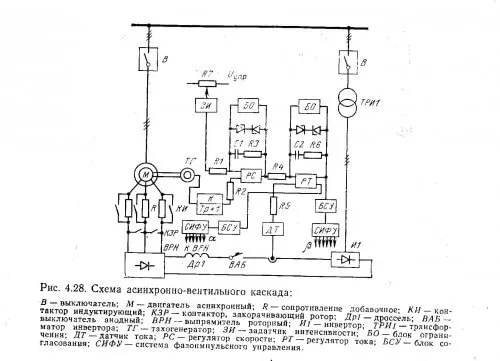
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина – не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие – массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование – основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
Читайте также: Как сверлить каленый металл. Как просверлить каленую сталь, методы. Сверление отверстий в металле — правила и технология
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей – INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя – в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Контроллер оборотов двигателя с Aliexpress
На известной торговой площадке можно приобрести недорогой и эффективный регулятор оборотов электродвигателя. При использовании такого прибора также не происходит снижение мощности мотора. Контроллер выполнен в прочном пластиковом корпусе, на передней панели которого находится кнопка включения с индикатором, а также переключатель реостата. К розетке реостат подсоединяется с помощью обычной штепсельной вилки.
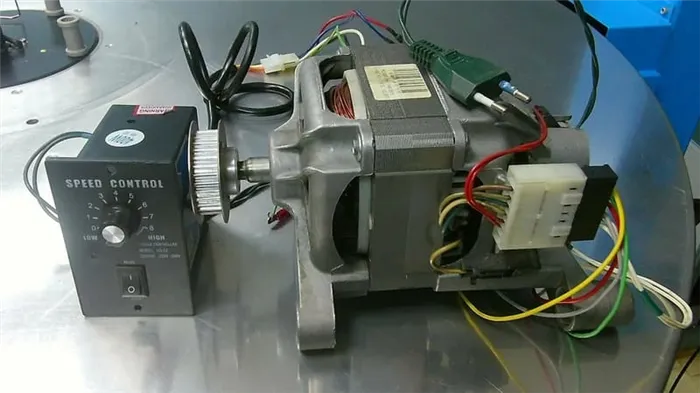
На задней панели регулятора оборотов имеется шлейф проводов, в котором одна пара – это «фаза» и «ноль» и вторая пара идёт к таходатчику электронного двигателя. Если через контроллер подсоединить к двигателю от стиральной машины только 2 основных провода, то мотор будет работать при максимальных оборотах. Для того чтобы появилась возможность регулировать обороты потребуется обязательно соединить провода, идущие от таходатчика.
Подключать к такому устройству можно не только двигатели от стиральной машины, но и моторы, снятые со старых дрелей и других ненужных электроинструментов. Главное при подготовке к работе правильно осуществить монтаж электрической системы. Работа по соединению регулирующего устройства с двигателем должна осуществляться в такой последовательности:
- Соединить провода, идущие от контроллера с мотором. При этом важно не перепутать назначение каждого проводника.
- Включить вилку устройства в сеть.
- Перевести положение реостата в положение «0».
- Нажать кнопку включения.
- Плавным движением реостата выбрать оптимальный режим вращения ротора.
Если регулятор оборотов будет использоваться только с одним потребителем электроэнергии, то после окончания работ достаточно выключить устройство на передней панели, а также отключить его от сети.
Многие самодельные мастера при подключении контроллера этого типа сталкиваются с одной проблемой. Провода, идущие от реостата, оформляются в разъём, который не подходит к штатному гнезду двигателей большинства моделей стиральных машин. Решается эта проблема перепайкой подходящей штекерной колодки, которую можно приобрести в специализированных магазинах либо снять со стиралки, с который был удалён двигатель.
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:

- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
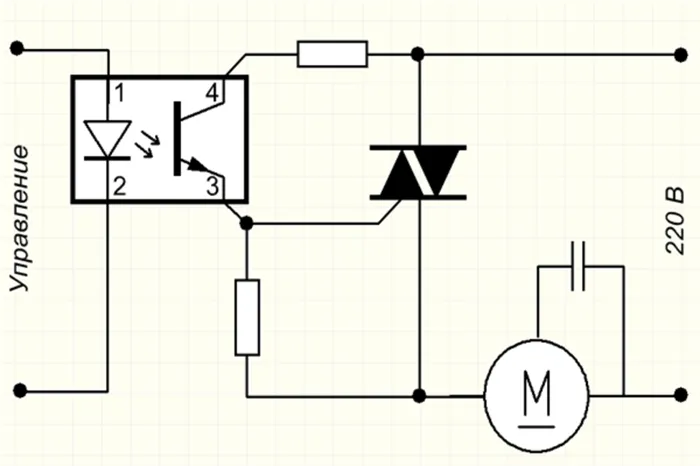
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
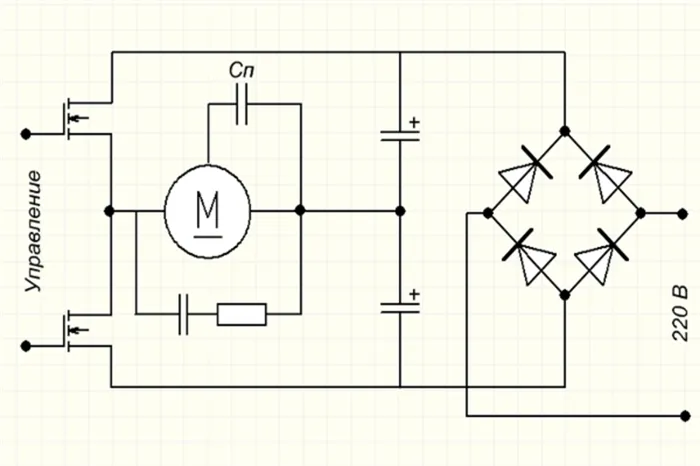
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
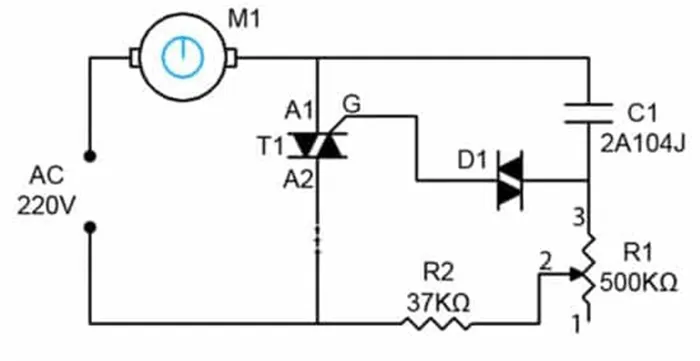
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
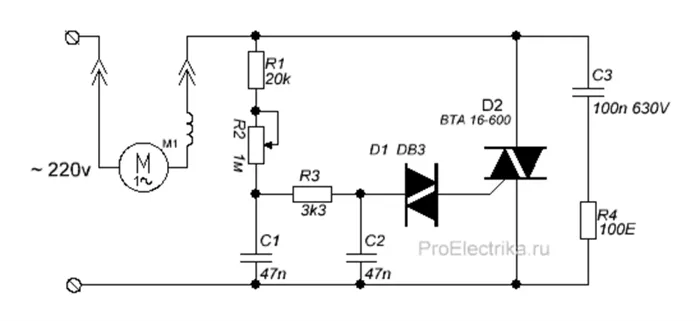
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.