Что касается переключателей, подключите +5В к одному концу, а кабель, идущий к другому входу Arduino, к другому концу. Мой джойстик имеет общую линию +5 В для всех переключателей. Я подключил только 2 кнопки, но потом добавил еще одну, когда это стало необходимо.
Как сделать манипулятор на 3D-принтере: пошаговая инструкция
Роботизированные контроллеры — это большой класс высокотехнологичных устройств, которые могут воздействовать на объект, перемещая, вращая или иным образом манипулируя им. С развитием робототехники эти устройства становятся все более популярными, а ассортимент, предлагаемый производителями, значительно расширился. Однако собрать робота можно и дома, особенно если у вас есть 3D-принтер.
- Что такое робот-манипулятор?
- Как сделать манипулятор на 3D-принтере: пошаговая инструкция
- Какие материалы и инструменты нужны?
- Как собрать манипулятор на принтере своими руками?
- Настройка робота
- Как двигать манипулятором?
Что такое робот-манипулятор?
Роботизированная рука — это устройство, используемое в производстве для манипулирования объектом. В большинстве случаев манипуляторы имеют параметры, аналогичные параметрам человеческих рук. Они могут быть полностью автономными или являться частью сложной роботизированной системы. Их части можно отличить по наличию различных механических узлов, отвечающих за выполнение вращательных или поступательных движений.
Использование роботов в производстве приводит к значительной оптимизации процессов, снижению затрат и повышению качества за счет уменьшения ошибок, допускаемых человеком на производственной линии. Еще одно очевидное преимущество робототехники в производстве — сокращение ненужных отходов сырья и травм работников.
Использование операторов может не только повысить уровень производства, но и увеличить прибыльность за счет снижения затрат и некачественной продукции.
Независимо от назначения робота, конструкция манипуляторов схожа и напоминает строение человеческой руки.

- плечо, представляющее собой статичную основу, на которую прикрепляются прочие детали и узлы;
- запястье;
- локоть;
- кисть.
Яркими представителями этой категории являются:
- LEGO Mindstorms. Представляет собой серию учебной техники, предназначенную для понимания принципов роботостроения в полном объеме – от этапа сборки, до программирования и последующего тестирования.
- Роботизированная система Vegebot, предназначенная для автоматизированного сбора урожая в сельскохозяйственной деятельности. Робот может самостоятельно убрать урожай с поля, подстроившись под тип овощей.
- KUKA LBR Med – робот-манипулятор, предназначенный для работы в медицинской отрасли. В его основу лег предельно чувствительный робот модели LBR iiwa. Предназначение этого робота – помощь в операционной.

Цена манипуляторов промышленных роботов зависит от их назначения, но редко бывает меньше 150 000 рублей.
Как сделать манипулятор на 3D-принтере: пошаговая инструкция
Какие материалы и инструменты нужны?
Для сборки манипулятора робота с помощью 3D-принтера необходимы следующие компоненты:
- Серво-моторы, например DYNAMIXEL AX-12A или SG 90 или 3 995(946). Количество зависит от планируемой мощности и предназначения робота. Их стоимость – от 6500 рублей за 1 штуку.
- 3D-принтер и пластиковая нить к нему.
- Плата Arduino Uno.
- Плата расширения Arduino Power Shield (цена – от 4000 рублей).
- Лабораторный источник питания (от 3500 рублей).
Он также необходим для сборки манипулятора робота:
- болты М6 25 мм и гайки с прорезиненной подставкой соответствующего размера;
- болты М4 40 мм;
- болты М4 30 мм;
- болты М4 20 мм;
- гайки М4 (с защитой от раскрутки);
- болты М3 20 мм и гайки с прорезиненной подставкой соответствующего размера;
- болты М3 10 мм;
- болты М4 20 мм;
- ось М4 60 мм с нарезкой;
- ось 32 мм с нерезкой;
- подшипник 606zz;
- шилд или макетка с соединительными проводами.
Как собрать манипулятор на принтере своими руками?
Сборка роботизированной руки должна начинаться с печати компонентов руки на 3D-принтере. Для этого необходимо разработать 3D-модели или загрузить готовые STL-файлы, собрать напечатанные детали и установить серводвигатели.
После сборки манипулятора необходимо установить блок управления. Это необходимо:
- Установить Robot Operating System (ROS) – программу с открытым кодом, которая представляет собой совокупность инструментов и библиотек, позволяющих создавать приложения для управления роботизированной техникой.
- Для эффективной работы с ROS необходимо создать URDF-модель. Она нужна для полноценного управления рукой-манипулятором с использованием пакета MoveIT. Построение модели – ответственная задача, которая требует сосредоточенности и серьезных временных затрат. Все созданные ранее STL-файлы необходимо собрать в единый файл формата XML, опытным путем подобрав подходящие коэффициенты смещения деталей относительно друг друга. Когда процесс будет завершен, из URDF-файла будет создана конфигурация для работы с модулем MoveIT, которая позволит программировать движения робота и управлять устройством.
Настройка робота
Для установки пользователю необходим компьютер или ноутбук. Если используется компьютер, необходимо установить дополнительную карту беспроводного подключения. Если соответствующий модуль не установлен, точка доступа не будет найдена.
Следующий шаг — предварительная настройка серводвигателей. Это необходимо сделать до того, как они будут установлены на манипуляторе робота. Это связано с тем, что в их конструкции предусмотрены «слепые зоны». Поэтому перед присоединением их необходимо запрограммировать под углом 90 градусов, чтобы кран мог двигаться как вправо, так и влево. После этого серводвигатель захвата должен быть перезапущен, лезвия захвата закрыты, а затем заблокированы.
Как двигать манипулятором?
Движение робота обеспечивается платами Arduino UNO и Power Shield. Один из двигателей робота должен быть подключен к Power Shield и источнику питания путем соединения разъема данных двигателя с контактами 3 и 4 на плате. Это терминал данных серводвигателя, который используется одновременно для приема команд и для ответа устройства (связь с двигателем организована по асинхронному последовательному полудуплексному протоколу связи).
Необходимые компоненты
- Плата Arduino Nano (купить на AliExpress).
- Сервомотор MG-995 (5 шт.) (купить на AliExpress).
- Потенциометр (5 шт.) (купить на AliExpress).
- Перфорированная плата.
- Скелет роботизированной руки и крепления.
Примечания: Скелет этой роботизированной руки был полностью напечатан с помощью 3D-принтера. Если у вас есть доступ к 3D-принтеру, вы можете распечатать все части руки из файлов, приведенных ниже. Если у вас нет доступа к 3D-принтеру, вы также можете сделать раму этого манипулятора из акрилового волокна или дерева. В простейшем случае каркас такого манипулятора можно сделать из обычных листов картона, как это было сделано для простейшего манипулятора робота на базе платы Arduino.
3D печать и сборка роботизированной руки
Сначала мы пытались разработать этот манипулятор самостоятельно, но потом обнаружили, что на Thingiverse уже есть несколько отличных проектов подобных манипуляторов для роботов, и решили не «изобретать велосипед». Мы обнаружили, что манипулятор робота Ashing V2.0 отлично работает с серводвигателями MG995, что делает его идеальным для нашего проекта.
Поэтому перейдите по ссылке выше на Thingiverse и загрузите оттуда файлы моделей для этой руки. Рука состоит в общей сложности из 14 3D-печатных деталей, STL-файлы для всех деталей можно загрузить по указанной ссылке. Мы использовали программное обеспечение Ultimaker Cura 3.2.1 для редактирования STL-файлов и 3D-принтер Tarantula от TEVO для печати компонентов манипулятора.
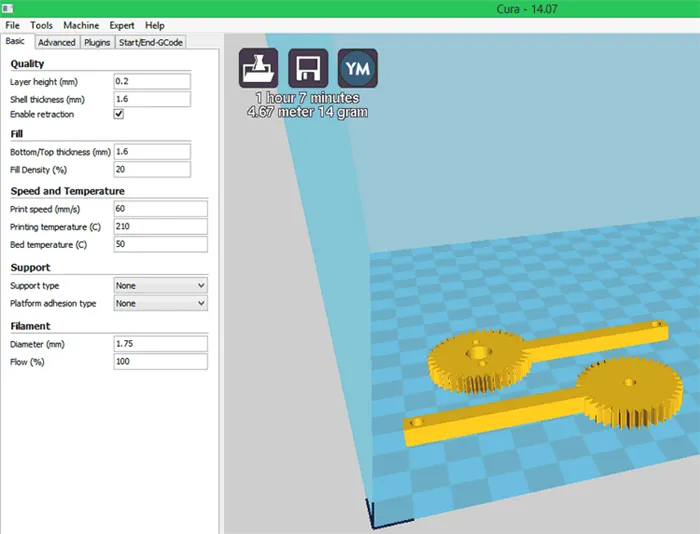
Конструкция всех частей этой руки настолько проста, что их можно напечатать практически на любом 3D-принтере. Нам потребовалось около 4,5 часов, чтобы напечатать все части руки. Инструкции по сборке манипулятора можно найти на этой странице, поэтому мы не будем вдаваться в подробности в нашей статье.
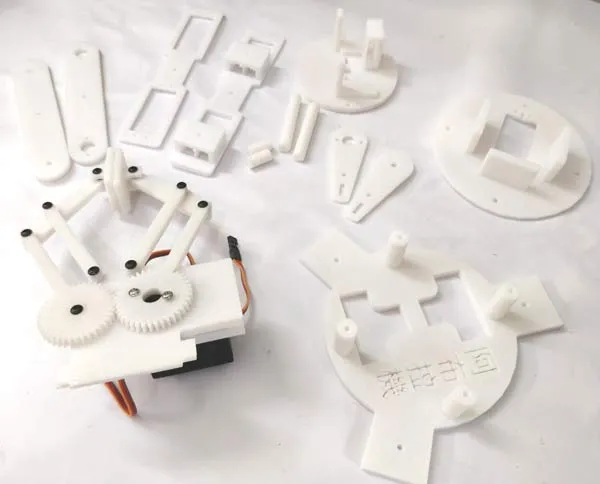
Единственное, на что мы хотели бы обратить внимание, это то, что вам может понадобиться вручную потянуть (отшлифовать) края некоторых деталей, чтобы зажать сервопривод на месте — обычно крепления сервоприводов разработаны таким образом, что сервоприводы вставляются с небольшим усилием, чтобы они лучше держались. Для сборки компонентов этой роботизированной руки вам понадобится 20 винтов диаметром 3 мм.
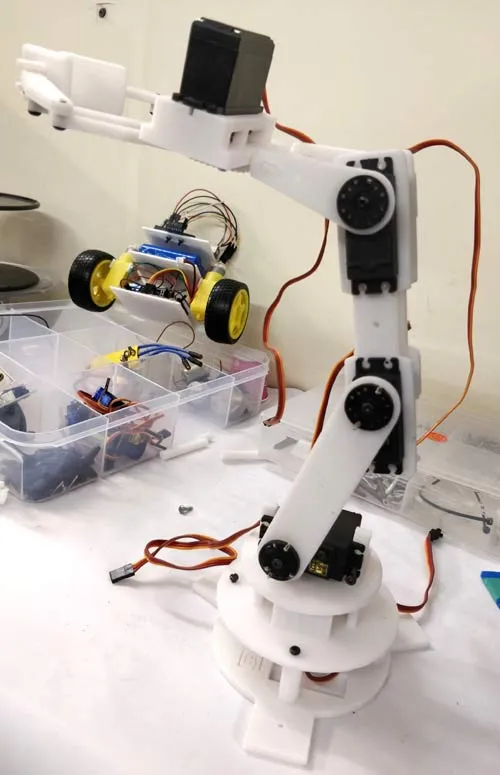
Прежде чем окончательно затянуть винты, убедитесь, что ничто не мешает серводвигателям вращаться в нужном направлении. Вам нужно будет подключить три серводвигателя с внешней стороны руки. Если вам нужно расширить их, вы можете использовать гнездо к гнезду. Следите за тем, чтобы кабели не перекручивались и не мешали кронштейну. После сборки манипулятора робота мы получили манипулятор следующего типа:
Работа схемы
Схема манипулятора робота на Arduino показана на следующем рисунке.
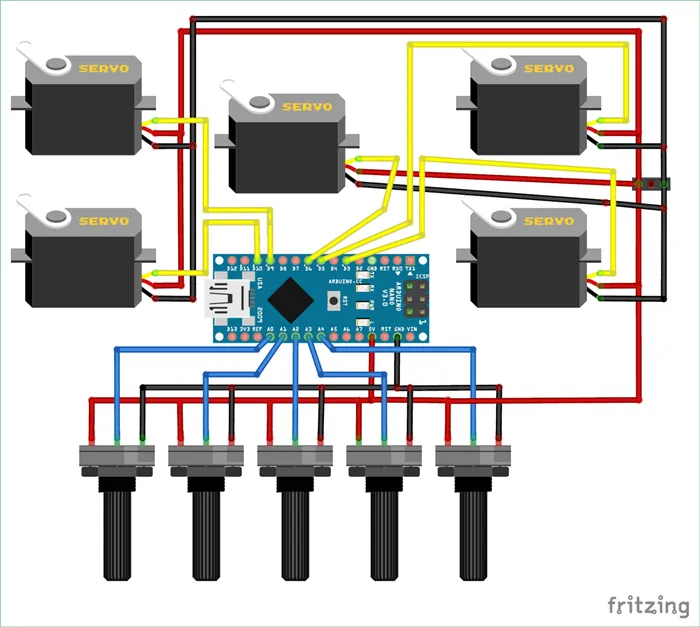
Поскольку серводвигатели MG995 работают с напряжением питания 5 В, вы можете подать на них питание через соответствующий разъем на плате Arduino. Управляющие контакты серводвигателей подключаются к цифровым контактам на плате Arduino, где могут генерироваться сигналы ШИМ (широтно-импульсной модуляции). Потенциометры подключаются к аналоговым контактам на плате Arduino для управления серводвигателями.
В любой момент времени в движении будет находиться только один серводвигатель, поэтому потребляемый ток не превысит 150 мА, а контроллер питания платы Arduino легко справится с такой нагрузкой. В нашем проекте питание самой платы Arduino осуществлялось от ПК через USB-кабель.
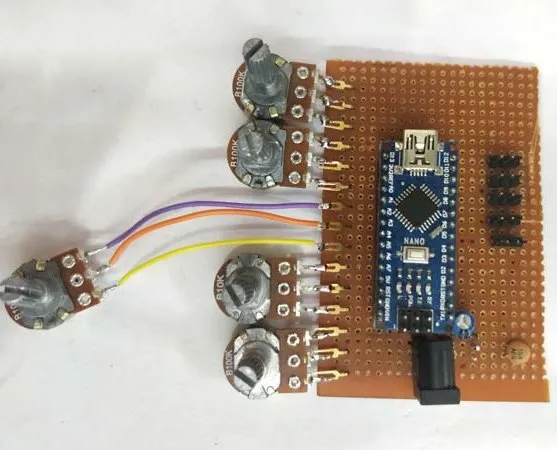
После пайки и сборки компонентов на перфорированной плате получается конструкция, показанная на следующем рисунке. Мы также добавили в проект разъем для подключения аккумулятора на случай, если впоследствии вам понадобится подать на него питание.
Если у вас нет опыта работы с серводвигателями, рекомендуем прочитать статью о подключении серводвигателя к плате Arduino.