Если вы оснастите свой проект робомобиля недорогим цифровым мини-вольтметром, вы сможете контролировать состояние заряда батареи во время движения. Контроль состояния заряда батареи особенно важен при использовании литий-ионных или литий-полимерных батарей.
TB6612FNG Hookup Guide
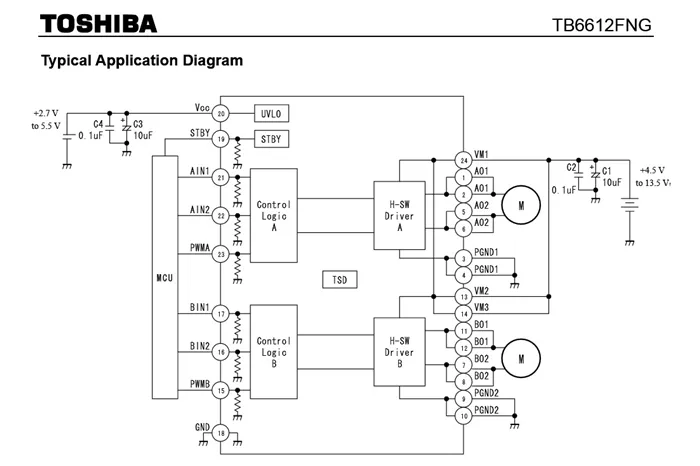
TB6612FNG — это простой и экономичный способ мониторинга двигателей. TB6612FNG может управлять двумя двигателями с постоянным током до 1,2 А. Внутри микросхемы находятся два стандартных H-моста на чипе, которые позволяют не только управлять направлением и скоростью двигателей, но и останавливать и тормозить их. В данном руководстве подробно описано использование карты разветвителя TB6612FNG. Библиотека для этого драйвера также работает на материнской плате RedBot, поскольку в ней используется тот же чип драйвера двигателя.
SparkFun Motor Driver — Dual TB6612FNG (with Headers)
Закрытие заказов — поставка главной ИС задерживается до июля 2022 года.
SparkFun Motor Driver — Dual TB6612FNG (1A)
Управление до двух выходов двигателя постоянного тока с постоянным током 1,2 A. Используйте до двух входных сигналов и четыре режима работы: CW…
SparkFun RedBot Mainboard
Материнская плата SparkFun RedBot — это платформа для разработки робототехники, которая работает с Arduino IDE…..
Required Materials
Чтобы выполнить пример драйвера двигателя в этом руководстве, вам понадобятся следующие основные компоненты:
Suggested Reading
Прежде чем приступить к работе с данным руководством, просмотрите все пункты следующего списка, которые покажутся вам незнакомыми.
Electric Power
Обзор электрической мощности, скорости передачи энергии. Мы поговорим об определении мощности, ваттах, уравнениях и номинальной мощности. 1,21 Гигаватт Весело учить!
Polarity
Знакомство с полярностью электронных компонентов. Узнайте, что такое полярность, какие компоненты ее имеют и как ее распознать.
Alternating Current (AC) vs. Direct Current (DC)
Узнайте о различиях между переменным и постоянным током, истории, различных способах получения электроэнергии с помощью переменного и постоянного тока, а также о примерах применения.
Motors and Selecting the Right One
Learn all about different kinds of motors and how they operate.
Selecting the Right Motor Driver
Прежде чем приступить к работе, давайте поговорим о том, как найти подходящий драйвер двигателя для ваших нужд.
Прежде всего, необходимо четко определить тип используемых двигателей и изучить их технические характеристики. Не стоит выбирать драйвер двигателя для недостаточно мощного двигателя. Также помните, что существуют различные типы двигателей (шаговые двигатели, двигатели постоянного тока, бесщеточные двигатели), поэтому вы должны быть уверены, что ищете правильный драйвер двигателя.
Вам необходимо определить драйвер двигателя и убедиться, что диапазон тока и напряжения совместим с вашим двигателем (двигателями).
Во-первых, необходимо убедиться, что ваш драйвер двигателя может работать с номинальным напряжением ваших двигателей. Хотя обычно можно эксплуатировать двигатели немного выше их номинальных значений, это сократит срок службы двигателей и
Второй фактор — энергопотребление. Ваш драйвер двигателя должен быть способен обеспечить такой ток, который будут потреблять ваши двигатели. Как правило, следует ориентироваться непосредственно на ток срыва двигателя (ток, потребляемый при удержании двигателя в неподвижном состоянии). Двигатель потребляет максимальный ток, когда он находится в состоянии покоя. Даже если вы не собираетесь застопорить двигатель в своем проекте, это безопасное значение. Если ваш драйвер двигателя не может выдержать такой большой ток, пришло время найти новый драйвер двигателя (или двигатель). Вы также заметите, что в драйверах двигателей часто указывается максимальный постоянный ток и максимальный пиковый ток. Эти характеристики должны соблюдаться в зависимости от условий эксплуатации и нагрузки на двигатель.
В данном руководстве рассматривается драйвер двигателя TB6612FNG, который имеет диапазон питания от 2,5 В до 13,5 В и может обеспечивать постоянный ток 1,2 А и пиковый ток 3,2 А (на канал). Если TB6612FNG не соответствует спецификациям вашего проекта, ознакомьтесь с другими предлагаемыми нами платами драйверов двигателей.
Big Easy Driver
Big Easy Driver, разработанная Брайаном Шмальцем (http://www.schmalzhaus.com/), представляет собой плату драйвера шагового двигателя для биполярного…
SparkFun Servo Trigger
SparkFun Servo Trigger — это небольшая плата для робототехники, которая упрощает управление серводвигателями RC в хобби. Когда внешний …
SparkFun AutoDriver — Stepper Motor Driver (v13)
Плата SparkFun AutoDriver основана на драйвере шагового двигателя STMicro L6470 dSPIN. С помощью этого мощного чипа вы можете управлять…
SparkFun Servo Trigger — Continuous Rotation
SparkFun Continuous Rotation (CR) Servo Trigger — это небольшая плата для робототехники, которая упрощает управление серводвигателями RC хобби…..
Как и в случае с любой другой платой, есть и другие моменты, которые необходимо учитывать, такие как логическое напряжение, которое используется платой для связи с микроконтроллером, и тепловыделение. Хотя эти вещи определенно нужно учитывать, их относительно легко исправить с помощью таких вещей, как смещение уровня и теплоотводы. Однако, если ваш двигатель пытается потреблять больше тока, чем может выдержать ваш драйвер, вы мало что можете с этим поделать.
Board Overview
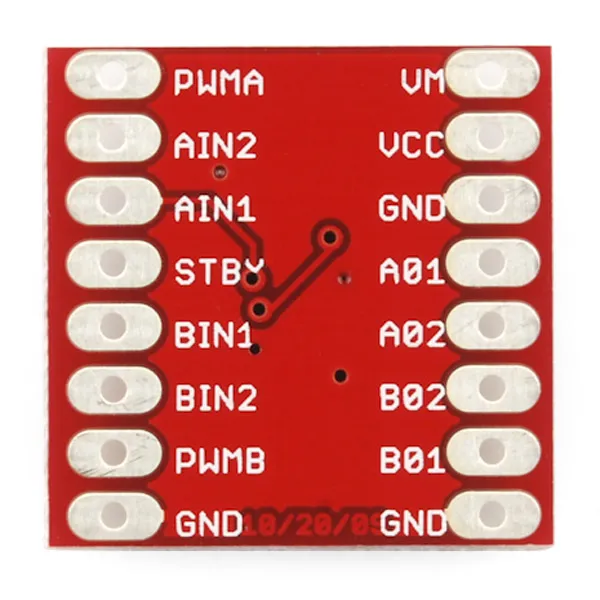
Давайте обсудим распиновку разъема TB6612FNG. В основном, есть три типа контактов: питание, вход и выход, все они обозначены на обратной стороне платы.
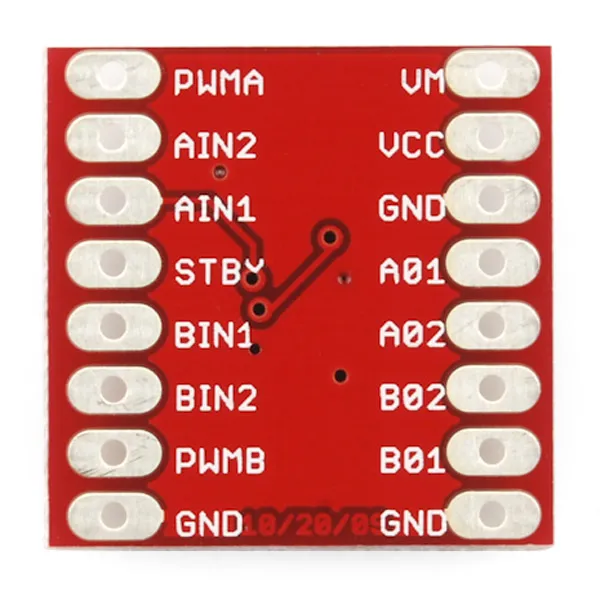
Описание каждого контакта и его функции приведено в таблице ниже.
| Штыревая этикетка | Функция | Питание/вход/выход | Примечания |
|---|---|---|---|
| VM | Motor Voltage | Power | This is where you provide power for the motors (2.2V to 13.5V) |
| VCC | Logic Voltage | Power | This is the voltage to power the chip and talk to the microcontroller (2.7V to 5.5V) |
| GND | Ground | Power | Common Ground for both motor voltage and logic voltage (all GND pins are connected) |
| // Если после сборки робота двигатели вращаются в неправильном направлении, например, при беге вперед, проще изменить значения этих констант, чтобы // избежать повторного припаивания кабелей к двигателям. Значения этих констант могут быть равны 1 ил и-1. | Standby | Input | Allows the H-bridges to work when high (has a pulldown resistor so it must actively pulled high) |
| AIN1/BIN1 | Input 1 for channels A/B | Input | One of the two inputs that determines the direction. |
| AIN2/BIN2 | Input 2 for channels A/B | Input | One of the two inputs that determines the direction. |
| PWMA/PWMB | PWM input for channels A/B | Input | PWM input that controls the speed |
| A01/B01 | Output 1 for channels A/B | Output | One of the two outputs to connect the motor |
| A02/B02 | Output 2 for channels A/B | Output | One of the two outputs to connect the motor |
Теперь краткий обзор того, как управляются отдельные каналы. Если вы используете Arduino, вам не нужно слишком беспокоиться об этом, так как библиотека сделает все это за вас. Если вы используете другую платформу управления, вам следует обратить на это внимание. Если выходы установлены на High/Low, двигатель будет работать. Если они установлены в положение Low/High, двигатель будет работать в противоположном направлении. В обоих случаях скорость контролируется входом ШИМ.
| В1 | В2 | PWM | Выход1 | Выход2 | Функция |
|---|---|---|---|---|---|
| H | H | H/L | L | L | Short brake |
| L | H | H | L | H | CCW |
| L | H | L | L | L | Short brake |
| H | L | H | H | L | CW |
| H | L | L | L | L | Short brake |
| L | L | H | OFF | OFF | Stop |
Помните, что STBY должен быть высоким, чтобы двигатели могли двигаться.
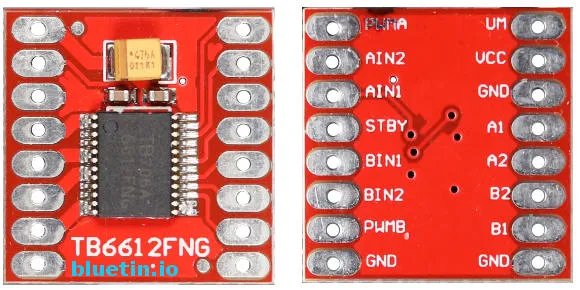
TB6612FNG Motor Driver
Технические характеристики
- Motor supply voltage 2.5 V to 13.5 V.
- Supply voltage (VCC): 2.7 V to 5.5 V
- Output current: 1.2 A average and 3.2 A peak.
- Function modes: CW, CCW, short brake and stop.
- Including built-in thermal shutdown and low voltage detection circuits.
- Standby power-save mode with an internal pull-down resistor.
- Module dimensions: 21mm x 20.5mm.
Следующие электрические схемы и примеры кодов содержат много информации о драйвере двигателя TB6612FNG, а спецификация на этот драйвер восполнит недостающие детали.
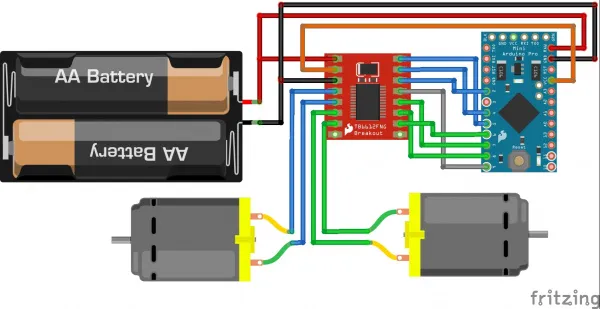
TB6612FNG DC Motor Connection
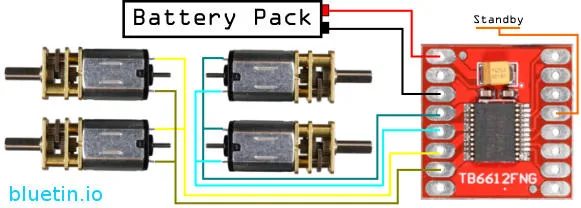
TB6612FNG может поддерживать четыре микромощных металлических редукторных двигателя средней мощности в роботизированном транспортном средстве с приводом на четыре колеса. Однако для согласования других двигателей постоянного тока с этим драйвером используйте номинальный ток срыва из спецификации двигателя постоянного тока.
Вы можете включить двигатели постоянного тока, подключив клемму ожидания драйвера двигателя к источнику питания Vcc. Кроме того, если вы используете микроконтроллер с непредсказуемым состоянием выводов при запуске, вы можете использовать режим ожидания для «ручного» включения драйвера двигателя после инициализации состояния выводов.
TB6612FNG Arduino Connection
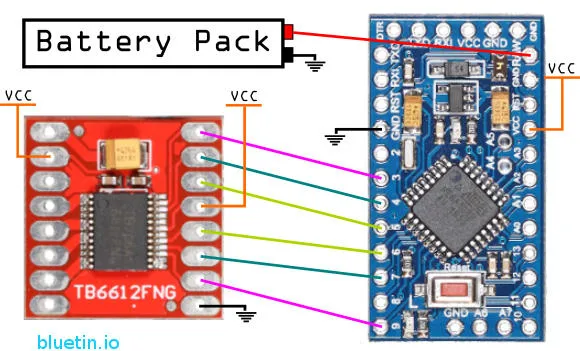
Совместимые платы Arduino могут быть подключены непосредственно к драйверу двигателя. Однако остерегайтесь соединений с ШИМ, так как эти соединения требуют определенных выводов Arduino для обеспечения ШИМ.
По умолчанию контакты на платах Arduino (ATMEGA) установлены как входы. Поэтому можно подключить вывод режима ожидания драйвера TB6612FNG к VCC. Для управления драйвером двигателя контакты Arduino должны быть сконфигурированы как выходы.
Arduino 3.3 Вольт
Драйвер двигателя TB6612FNG может работать с напряжением 3,3 вольта. Поэтому вы можете использовать 3,3-вольтовую версию Arduino Pro Mini. Для этой установки подходит батарейный блок с двумя последовательно соединенными Li-Ion/Li-Po 3,6-вольтовыми батареями или шестью NI-MH 1,2-вольтовыми элементами. Вы можете добиться полного разряда батареи и при этом иметь достаточный запас для падения напряжения регулятора Arduino на 3,3 вольта.
Arduino 5 вольт
При конфигурации батарейного блока, как описано выше, падение напряжения на встроенном 5-вольтовом регуляторе Arduino уменьшается. Поэтому, в зависимости от типа встроенного регулятора, вам может потребоваться зарядить аккумуляторную батарею раньше, чтобы не повлиять на работу 5-вольтового регулятора. Кроме того, если батареи слабые, двигатели постоянного тока могут вызвать значительное падение напряжения в энергосистеме. Такое падение напряжения может привести к перезагрузке платы Arduino.
TB6612FNG and Arduino Power Supply
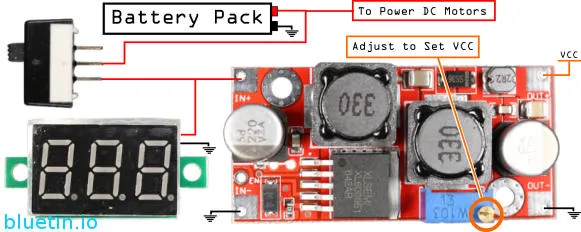
Приведенная выше схема обеспечивает стабильное VCC от батарейных массивов с широким диапазоном напряжения. Если в цепи используется смесь 5 и 3,3 вольт, сначала установите повышающий преобразователь постоянного тока на 5 вольт. Затем, после установки напряжения 5 вольт, добавьте регулятор на 3,3 вольта, например, AMS1117. Это позволит вам запустить Arduino и TB6612FNG при напряжении 5 вольт и радиомодуль NRF24L01 при напряжении 3,3 вольта.
Related Articles
GPIO PWM ШИМ для управления двигателем постоянного тока моста Raspberry Pi H-Bridge — Ссылка.
L298N H-Bridge DC Motor Driver Module Quick Start Guide — Ссылка.
Buying Featured Items
Цена покупки сильно варьируется в зависимости от того, как скоро вам понадобятся предметы. Поэтому проверьте Amazon, Ebay, Adafruit и ваши местные магазины электроники.
DISCLAIMER: Этот пост может содержать партнерские ссылки. Это означает, что я получу небольшую комиссию, если вы нажмете на любую из ссылок на товар. Это помогает поддерживать сайт и позволяет мне разрабатывать такие функции, как эта. Большое спасибо за вашу поддержку!
BANGGOOD
- DC-DC Boost Buck Adjustable Step Up Step Down Converter XL6009 Module – Link.
- TB6612FNG Dual DC Motor Driver Module – Link.
- 0.28 Inch 2.5V-30V Mini Digital Volt Meter – Link.
- Arduino compatible Pro Mini 5 volts – Link.
- PCB Panel Mini Vertical Slide Switch – Link.
- 40pcs FR-4 2.54mm Double Sided Prototype PCB – Link.
TB66121FNG H-Bridge
Теперь давайте посмотрим на наш «лучший» модуль H-Bridge.
TB6612FNG H-Bridge — это небольшой и недорогой двухканальный контроллер H-Bridge, в котором для достижения высокой производительности используются МОП-транзисторы.
Made with MOSFETs
МОП-транзисторы имеют большое преимущество перед биполярными транзисторами или BJT.
Типичный BJT имеет падение напряжения около 0,7 вольт во включенном состоянии, а поскольку H-мост требует протекания тока через два BJT, общее падение напряжения составляет 1,4 вольта. При низких напряжениях это может иметь большое значение. Если подать на Н-мост напряжение 6 вольт, выходное напряжение для двигателя составит всего 4,6 вольт. В этом примере почти 25% напряжения теряется в Н-мосте.
Энергия этого напряжения должна куда-то деваться, и она рассеивается в виде тепла. По этой причине большинство Н-мостов на основе BJT требуют большого теплоотвода.
В МОП-транзисторе нет постоянного падения напряжения. Вместо этого МОП-транзистор имеет очень низкое сопротивление, когда он включен, обычно доли ома. Даже когда два МОП-транзистора «открыты» в конструкции Н-моста, общее сопротивление очень мало. Если вы используете для питания длинные тонкие кабели, сопротивление в них может быть даже больше, чем в Н-мосте.
Результатом является чрезвычайно низкое, практически пренебрежимо малое падение напряжения. Это означает, что почти все напряжение сети поступает на двигатель. А поскольку падение напряжения очень низкое, необходимо рассеивать очень мало тепла.
Если вы хотите узнать больше о работе с МОП-транзисторами и транзисторами с биполярным переходом, прочитайте статью и видео Arduino High-Current Interfacing — Transistors & MOSFETs .
TB6612FNG Specifications
TB6612FNG имеет следующие характеристики (характеристики относятся к каждому из двух H-мостов в корпусе):
- Motor supply voltage of 2.5 to 13.5 volts DC.
- Logic supply voltage of 2.7 to 5.5 volts DC.
- Output current of 1.2 amperes continuous, 3.2 amperes peak.
- Built-in thermal shutdown.
- Standby power mode.
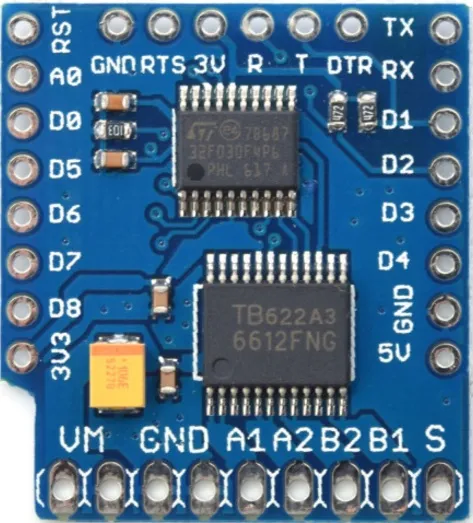
Это устройство представляет собой микросхему поверхностного монтажа, доступную во многих популярных модулях, экранах для Arduino и HAT для Raspberry Pi.
Распиновка типичного модуля TB6612FNG показана ниже:
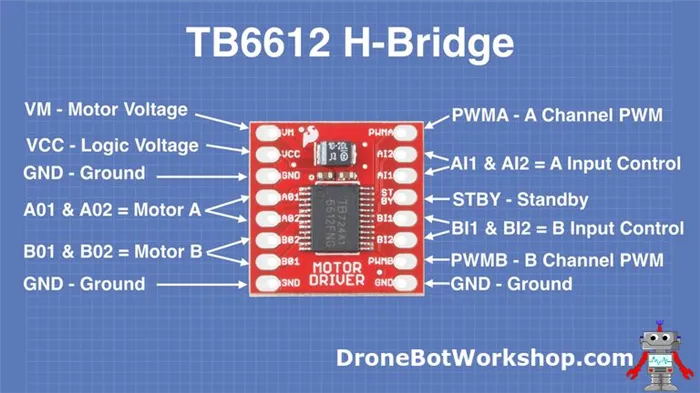
При компоновке модуля обратите внимание, что все входные контакты находятся на одной стороне, а все выходные и контакты питания — на другой. Стоит отметить, что этот двухмостовой модуль H-моста не имеет теплоотвода, хотя при желании вы можете установить небольшой теплоотвод на микросхему поверхностного монтажа.
Controlling the TB6612FNG
TB6612FNG может работать в четырех режимах:
- Clockwise Rotation
- Counterclockwise Rotation
- Short Brake
- Stop
Для управления перемычкой H используйте клеммы AI1 (или маркированные «AIN1» на некоторых моделях) и AI2 (AIN2) для выхода двигателя A; клеммы управления входом B аналогично используются для выхода двигателя B.
В следующей таблице показано, как это работает:
| Input 1 (AI1 or BI1) | Input 2 (AI2 or BI2) | Функция |
| HIGH | HIGH | Short Brake |
| LOW | LOW | Stop |
| HIGH | LOW | Clockwise |
| LOW | HIGH | Counterclockwise |
TB6612 vs. L298N
Ключевая фраза в последнем абзаце — «во многих случаях». В некоторых случаях, например, при использовании двигателей с высоким напряжением, TB6612FNG не может быть использован. Но для многих конструкций, в том числе с 6- и 12-вольтовыми двигателями, это идеальная замена, обеспечивающая лучшую производительность.
Посмотрите на технические характеристики TB6612FNG и L298N рядом друг с другом.
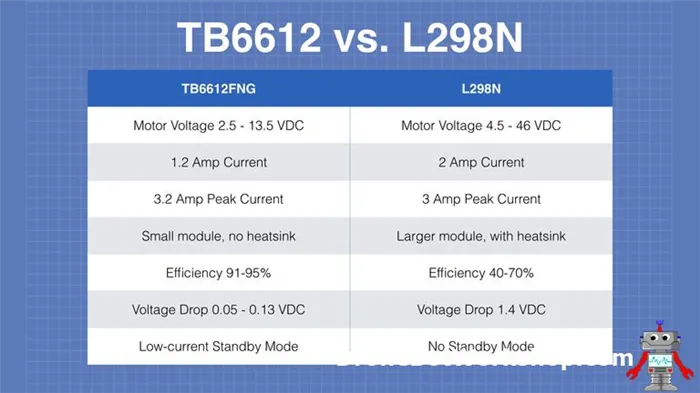
Если у вас есть двигатель, которому требуется напряжение более 13,5 вольт, то TB6612FNG исключается. Однако, если ваш двигатель низковольтный (например, 3 вольта), то о L298N не может быть и речи.
Хотя L298N может обрабатывать почти в два раза больше постоянного тока, чем TB6612FNG, по пиковому току они примерно равны, причем TB6612FNG даже имеет небольшое преимущество.
Но после этого TB6612FNG становится явным победителем.
- It is much smaller, in fact, most TB6612FNG modules are less than a quarter of the size of L298N modules.
- No heatsink, making it even smaller. However, it is a good idea to allow some airflow around the device.
- The efficiency is where the TB6612FNG really shines. There really is no contest here, something to strongly consider when building a battery-powered device.
- Virtually all of your motor supply voltage will get to the motor when you use the TB6612FNG. The L298N will drop 1.4-volts, as it uses BJTs.
- The TB6612FNG has a low-current standby mode that the L298N does not have.
Я думаю, что перейду на TB6612FNG для своих новых разработок, хотя у меня есть ящик, полный блоков L298N!
TB6612FNG with Arduino
Поскольку TB6612FNG использует схему управления, аналогичную L298N, вы можете легко использовать свои старые скетчи для работы с новым контроллером. Именно так я поступил с первой демонстрацией.
Если вы хотите сравнить, посмотрите эксперимент «Два двигателя с потенциометрами» в моей статье о L298N. Вы определенно должны увидеть сходство между ними.
TB6612FNG Hookup
Для этого эксперимента вам понадобятся следующие компоненты:
- An Arduino, I used an Arduino Uno but any Arduino will work.
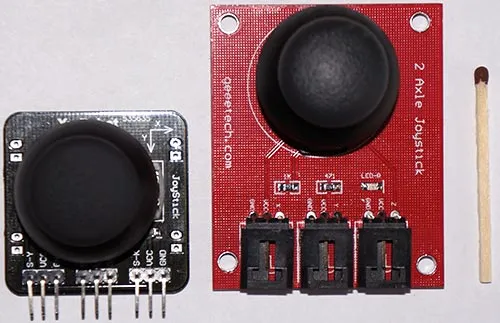
- Two potentiometers to control speed. I used 10K linear pots, any linear pot with a value over 5K will suffice.
- A TB6612FNG dual H-Bridge motor controller.
- Two small DC motors. I used two 6-volt motors, the yellow ones you get with those small robot car kits.
- A power supply for the motors. As I used 6-volt motors my supply was 6-volts, consisting of 4 type AA batteries.
Подключение осуществляется следующим образом: Подключение осуществляется следующим образом: Подключение осуществляется следующим образом: Проводка выглядит следующим образом
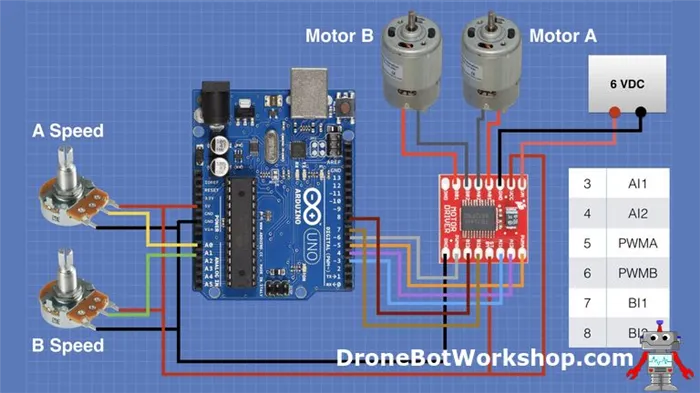
Для подключения TB6612FNG к Arduino используйте таблицу сбоку от схемы соединений. И не забудьте подключить кабель STBY (режим ожидания) к +5 вольтам, иначе ничего не будет работать.
TB6612FNG Arduino Sketch
После того как вы все подключили, нужно запустить скетч, чтобы все заработало. Это можно проиллюстрировать следующим рисунком:
АРДУИНО УПРАВЛЕНИЕ ДВИГАТЕЛЕМ | БИБЛИОТЕКА
В интернете есть несколько программ (скетчей) для обеспечения работы Arduino с чипом TB6612FNG, но мы не ищем легких путей, чтобы заставить его работать. Нам нужна универсальная программа на все случаи жизни и вспомним подключение библиотеки в нашей незабвенной ArduinoIDE. Решая задачу, вы изучаете язык C++.
Библиотека — это универсальная программа, уже написанная кем-то для нас, с готовыми функциями для решения конкретной задачи. Все, что нам нужно сделать, это загрузить библиотеку в ArduinoIDE и указать ей, куда ее загрузить. И, конечно, если вы пишете программу (скетч) самостоятельно, включите библиотеку в файл с расширением .h, например, так: #include
- для начала загружаем библиотеку от компании SparkFun Electronics по этой ссылке, или качаем последнюю версию из их же репозитория на GitHub, в любую папку на Вашем компьютере, главное не забыть в какую, в дальнейшем понадобится.
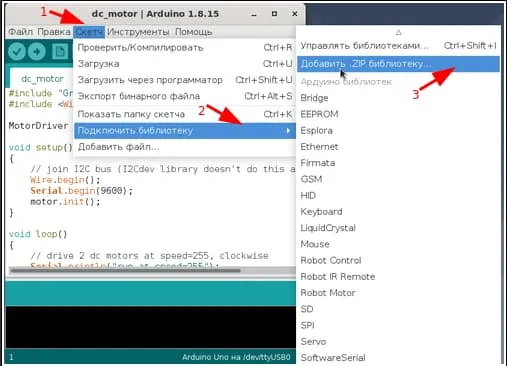
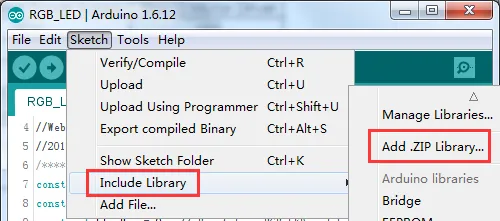
2. Запускаем ArduinoIDE. Жмем: Скетч (1) ->Подключить библиотеку (2) ->Добавить библиотеку ZIP … (3).
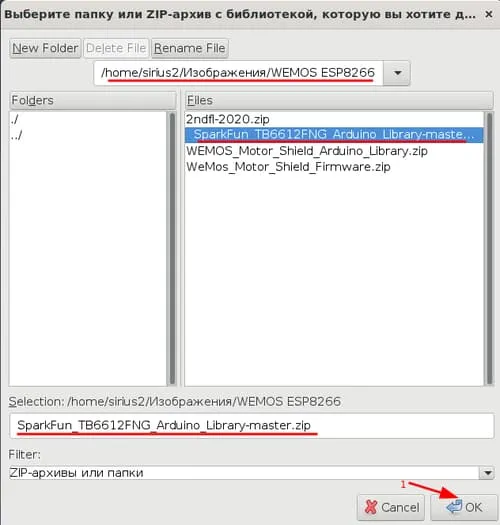
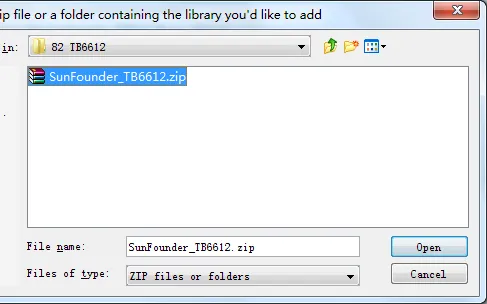
В левой части окна (Folder) найдите папку, в которую вы загрузили библиотеку из SparkFun Electronics (см. пункт 1.). В правой части (Files) найдите и отметьте zip-файл (.ZIP): SparkFun_TB6612FNG_ Arduino_ Library_master.zip и нажмите OK (стрелка 1). 4.
4. в нижней части следующего окна (черная область для сообщений) прочитайте сообщение: Добавлена библиотека. Активируйте меню «Подключить библиотеку».
5. Проверяем меню «Подключить библиотеку». Жмем: Скетч (1) ->Connect Library (2) — в открывшемся длинном списке почти в самом конце находим библиотеку драйверов двигателей SparkFun TB6612FNG (3).
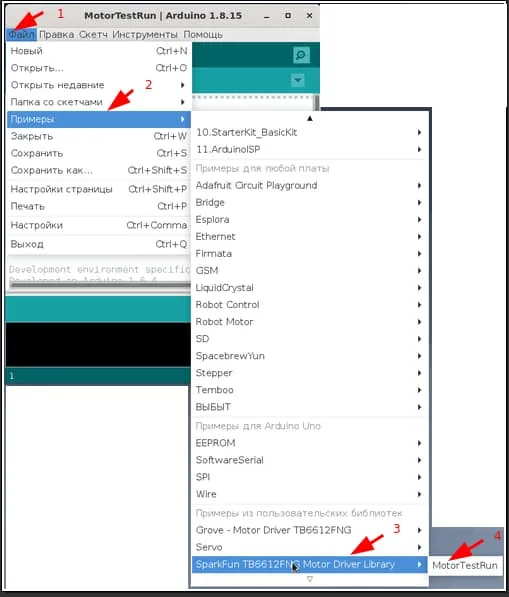
6. Запускаем пример программы (скетча) от SparkFun TB6612FNG Мотор Driver. Жмем: Файл (1) ->Примеры (2) ->в раскрывшемся длинном списке, почти в самом конце, обнаруживаем библиотеку SparkFun TB6612FNG Мотор Driver Library (3) ->и пример MotorTestRun (4).
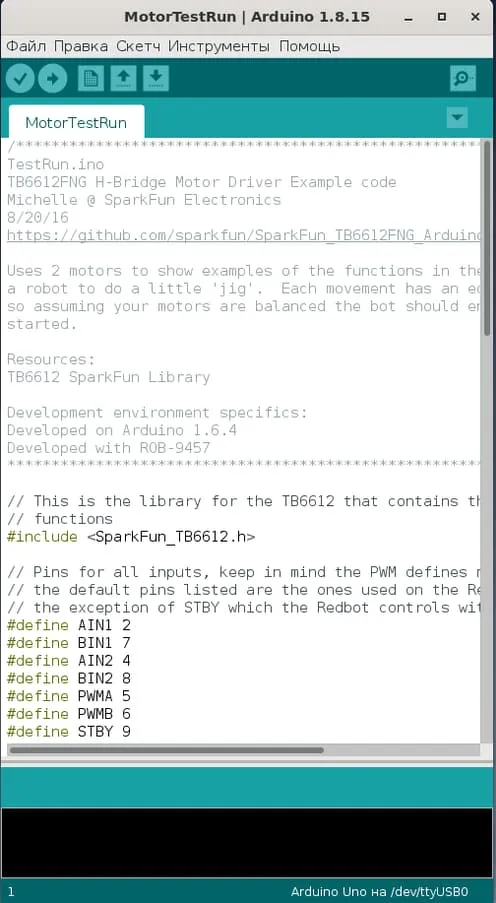
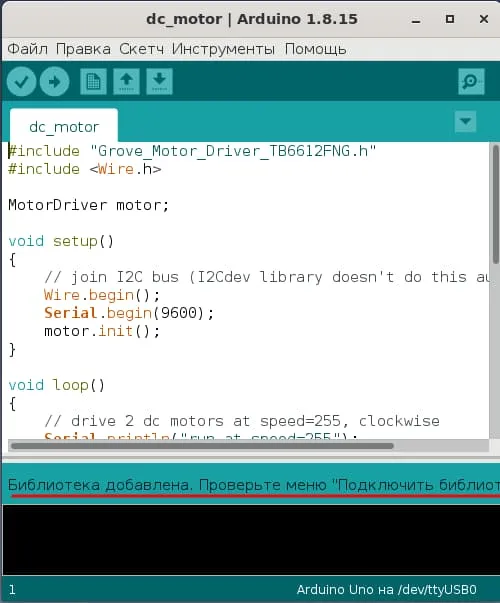
7. получаем пример программы (скетч) SparkFun MotorTestRun. Он состоит из изменяемых входных данных и функций из библиотеки SparkFun_TB6612.h
АРДУИНО УПРАВЛЕНИЕ ДВИГАТЕЛЕМ | ПРОГРАММА (СКЕТЧ)
TestRun.inoКод примера драйвера двигателя с H-мостом TB6612FNGМишель @ SparkFun Electronics8/20/16https://github.com/sparkfun/SparkFun_TB6612FNG_Arduino_LibraryЭта программа тестирует 2 двигателя, чтобы показать примеры библиотечных функций. Ваш робот будет совершать каждое движение вперед и назад по заданному графику. Если ваши двигатели сбалансированы, робот должен закончить движение в том же месте, откуда он стартовал.Ресурсы:TB6612 Библиотека SparkFunОсобенности среды развертывания:Разработана на Arduino 1.6.4.// Соедините библиотеку SparkFun_TB6612.h, которая содержит класс двигателя и все остальное.******************************************************************************/// Функции для этого классавключают.#SparkFun_TB6612определить..h>// #DEFAULTSPEED// Определите контакты для всех входов и выходов (не забудьте сравнить разные номера контактов на схеме и в программе) // Самое главное, чтобы входы PWMA PWMB на чипе TB6612FNG были подключены к PWM выходам Arduino, // они обычно имеют точку в дополнение к номеру "255" от их имени. Эти контакты управляют скоростью вращения двигателей. ~определить.#DEFAULTSPEEDопределить.2#DEFAULTSPEEDопределить.7#DEFAULTSPEEDопределить.4#DEFAULTSPEEDопределить.8#DEFAULTSPEEDопределить.5#DEFAULTSPEEDопределить.6#DEFAULTSPEED// Если после сборки робота двигатели вращаются в неправильном направлении, например, при беге вперед, проще изменить значения этих констант, чтобы // избежать повторного припаивания кабелей к двигателям. Значения этих констант могут быть равны 1 ил и-1.9constintсмещениеАconst=1;intсмещениеА// Инициализируйте двигатели. Создайте ОБЪЕКТЫ motor1 и motor2 класса Motor CLASS, написанного в библиотеке SparkFun_TB6612.h=1;Двигательдвигатель1Двигатель=двигатель1(определить.,определить.,определить.,const,// Если после сборки робота двигатели вращаются в неправильном направлении, например, при беге вперед, проще изменить значения этих констант, чтобы // избежать повторного припаивания кабелей к двигателям. Значения этих констант могут быть равны 1 ил и-1.);двигатель1Двигатель=двигатель1(определить.,определить.,определить.,// Инициализируйте двигатели. Создайте ОБЪЕКТЫ motor1 и motor2 класса Motor CLASS, написанного в библиотеке SparkFun_TB6612.h,// Если после сборки робота двигатели вращаются в неправильном направлении, например, при беге вперед, проще изменить значения этих констант, чтобы // избежать повторного припаивания кабелей к двигателям. Значения этих констант могут быть равны 1 ил и-1.);Настройка//ничего нет()недействительный>Настройка// Примените метод drive() к объекту motor1 с аргументами: Скорость о т-225 до 225 // и Продолжительность (этот аргумент необязателен) вращения в миллисекундах. Отрицательная скорость заставляет двигатель // вращаться в противоположном направлении. // Тормозите с помощью функции brake(). И подождите 1 секунду с помощью delay().()Мотор1Двигатель.Мотор1(255,1000);Двигатель.Мотор1(-255,1000);Двигатель.Замедление();// Примените те же действия к объекту motor2.(1000);двигатель2Двигатель.Мотор1(255,1000);Двигатель.Мотор1(-255,1000);Двигатель.Замедление();// Примените те же действия к объекту motor2.(1000);продолжитьдвигатель1(Двигатель,Двигатель,150);// Примените те же действия к объекту motor2.(1000);назаддвигатель1(Двигатель,Двигатель,-150);// Примените те же действия к объекту motor2.(1000);ТормозЗамедление(Двигатель,Двигатель);// Примените те же действия к объекту motor2.(1000);слевадвигатель1(Двигатель,Двигатель,100);// Примените те же действия к объекту motor2.(1000);Мотор1(Двигатель,Двигатель,100);// Примените те же действия к объекту motor2.(1000);ТормозЗамедление(Двигатель,Двигатель);// Примените те же действия к объекту motor2.(1000);>SparkFun_TB6612.cpp.В 2014 году у компании WeMos Electronics возникла простая идея: на основе микроконтроллера ESP8266 от Espressif Systems они разработали небольшой совместимый модуль для основного микроконтроллера и различных периферийных устройств, расположенных в виде стека, контакты которого совместимы по всему периметру. Компания WeMos Electronics продолжила разработку нескольких серий модулей, отличительными особенностями которых являются размер модуля, его цвет или, как в первой серии, углубление в плате для совмещения выводов питания 3,3 В, как в модуле контроллера двигателя TB6612FNG, показанном ниже. Микроконтроллер STM32 используется для управления TB6612FNG без использования более 7 выводов ESP8266 на модуле. Он взаимодействует с модулем ESP8266 по шине I2C и использует только 2 вывода ESP8266, позволяя другим модулям использовать доступные выводы ESP8266.
Все модули
Подробнее об этом устройстве читайте в нашей следующей статье:МОДУЛЬ WEMOS.
Все модули WeMos, которые мы купили, можно найти здесь (кликабельно):
Размер: 42 x 32 мм
Features
>Uses the TB6612FNG motor driver chip with a maximum output current of 1.2A.>Firm and convenient wiring, with anti-reverse port for both motor connection and signal input.>Simple control: control two motors simultaneously — MA and MB for direction of the motor, and PWMA and PWMB for rotational speed.>Dual power supply. VCC for the module: 2.7-5.5 V, VM for the motor: 15V (Max).>Small and lightweight, with 3mm mounting holes, suitable for smart cars.>Built-in thermal shutdown circuit and low-voltage detection.>Привод 2 двигателей для ускорения и замедления. Аксессуар ы-1 x TB6612 драйвер двигател я-1 x Arduino Un o-1 x двигател ь-1 x 18650 корпус батаре и-2 x Li-on 18650 батаре и-несколько кабелей-перемычек
I Drive 2 motors with Arduino
Добавьте библиотеку .ZIP.
Step 1. Install the library Open the Arduino software, and select Sketch ->Include Library ->Выберите загруженный zip-файл и откройте его. SunFounder_TB6612.zip
Выберите загруженный zip-файл, а затем загрузите этот пример.
Step 2. Open the Example Open File ->Examples –>Sunfounder TB6612 Motor Driver ->Шаг 3 Проводка Подключите независимый источник питания к устройству, как показано ниже:
Подключите Arduino UNO к модулю:
| Independent Power Supply | TB6612 Motor Driver |
| VCC | VM |
| GND | GND |
Подключите двигатель к модулю:
| Arduino UNO | TB6612 Motor Driver |
| 5V | VCC |
| GND | GND |
| 5 | MA |
| 6 | определить. |
| 9 | MB |
| 10 | определить. |
Вот как выглядит проводка:
| двигатель1 | TB6612 Motor Driver |
| Black wire | A1 |
| Red wire | A2 |
| Black wire | B1 |
| Red wire | B2 |
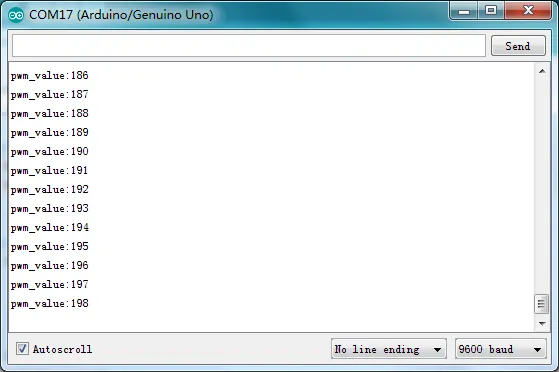
После загрузки примера двигатель ускоряется для поворота и замедляется вперед, затем повторяется обратный ход. Вы можете открыть последовательный монитор, чтобы увидеть изменение выходного значения ШИМ — разные значения от маленького до большего, а затем снова от большего до маленького. Существует положительная корреляция между скоростью двигателя и значением ШИМ.
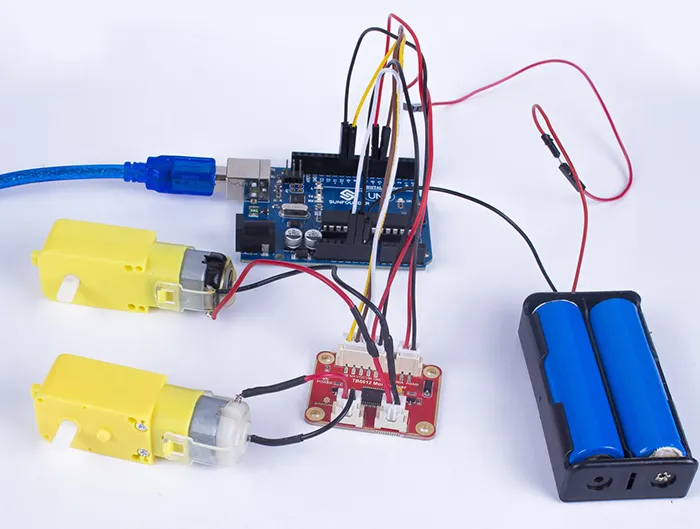
Шаг 1. Подключение Поскольку двигатель потребляет большое количество энергии, вам потребуется обеспечить устройство независимым источником питания, чтобы серводвигатель имел достаточный ток. Подключите независимый источник питания к устройству, как показано ниже: