Выходные контакты двух ИС L293D выведены на стороны экрана через 5-полюсные винтовые клеммы, а именно M1, M2, M3 и M4. К этим клеммам подключены четыре двигателя постоянного тока и два шаговых двигателя.
Motor Drive Shield L293D
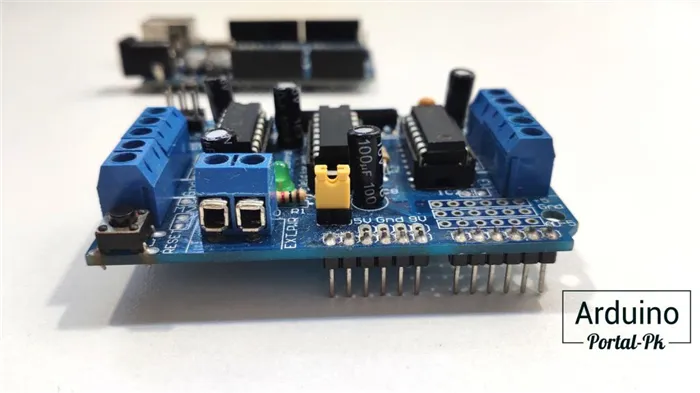
Motor Drive Shield L293D — это плата расширения для контроллеров серии UNO, предназначенная для питания и управления двигателями и сервоприводами. Он очень подходит для проектов с движущимися объектами, таких как робототехника, управление машинами, закрытие/открытие и других проектов, в которых используются двигатели и сервоприводы. Плата позволяет управлять четырьмя моторами или двумя сервоприводами. Он оснащен разъемом для подключения внешнего источника питания.
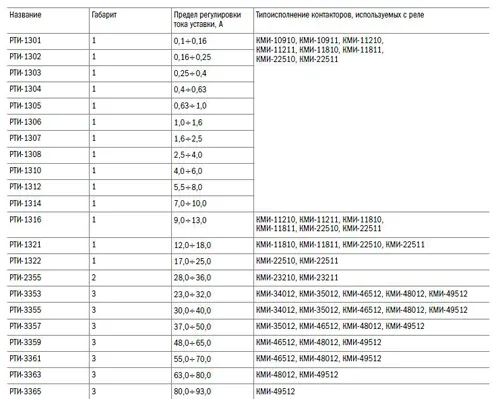
Предупреждение. При использовании этой платы не используйте цифровые выводы 2 и 13 контроллера в своих программах! В зависимости от предполагаемого использования двигателей могут использоваться другие контакты. В следующей таблице показаны используемые контакты
| Контакт платы шины | Занятые контакты контроллера |
|---|---|
| SER1 (сервопривод 1) | Цифровой контакт 9 |
| SER2 (сервопривод 2) | Цифровой контакт 10 |
| M1 (двигатель 1) | цифровой терминал 11 |
| M2 (двигатель 2) | цифровой терминал 3 |
| M3 (двигатель 3) | цифровой терминал 5 |
| M4 (двигатель 4) | цифровой терминал 6 |
| Шаговый двигатель | Цифровые контакты 4, 7, 8, 12 |
Примеры подключения и использования
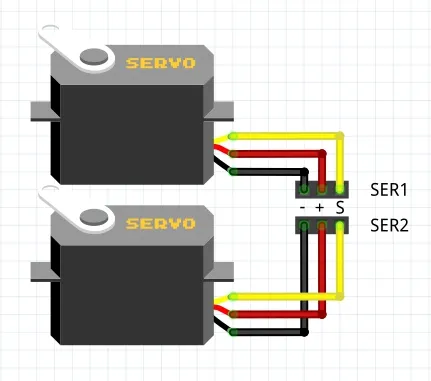
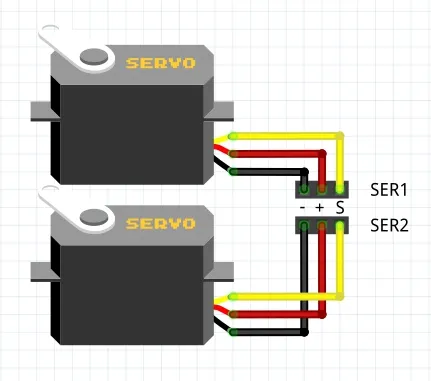
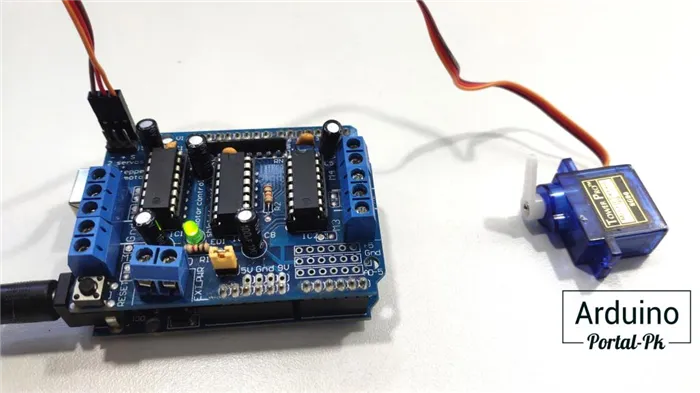
Пример 1: В примере показано подключение и управление двумя серводвигателями по шине.
Обратите внимание! Контакт SER1 на плате расширения подключается к контакту 9, а контакт SERVO_2 — к контакту 10 на контроллерах UNO.
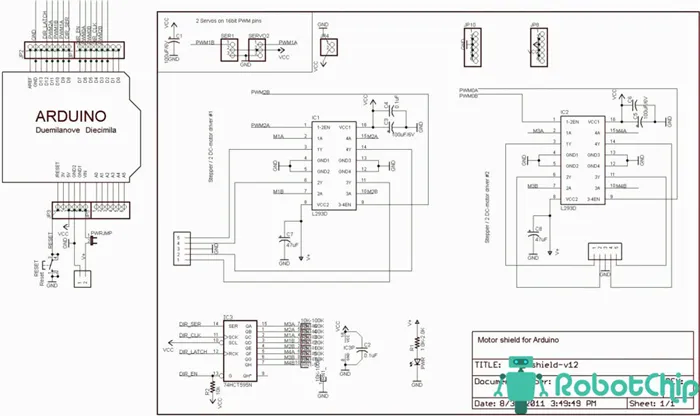
Принципиальная схема
Схема загрузки
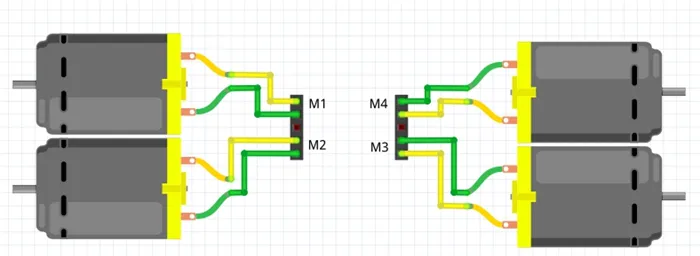
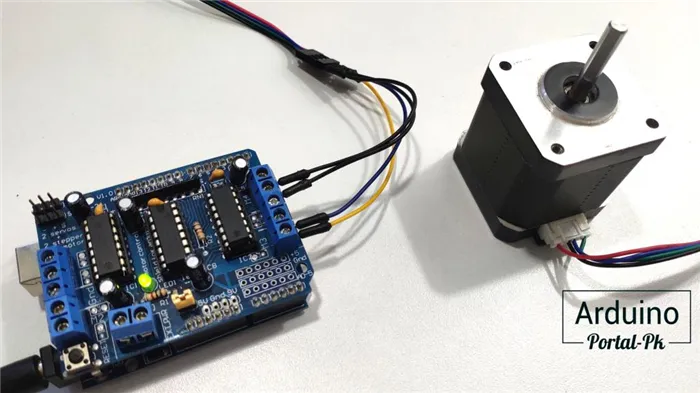
Пример 2: В примере показано подключение четырех коллективных двигателей к микросхеме и их работа. Для нормальной работы объединительной платы (двигателей) необходимо обеспечить внешнее питание.
Примечание. Клемма M1 (Motor1) — на плате расширения подключается к цифровой клемме 11, клемма M2 (Motor2) к клемме 3, клемма M3 (Motor3) к клемме 5 и клемма M4 (Motor4) к клемме 6 контроллеров UNO.
| Что вам нужно: | Количество, шт. |
|---|---|
| Интеллектуальный контроллер UNO | 1 |
| Плата драйвера двигателя L293D | 1 |
| Двигатель UNO Двигатель UNO L290 | 4 |
Принципиальная схема
Схема загрузки
© 2014-2022 SmartElements — DIY электроника Arduino, компоненты для робототехники и электронных устройств. «SmartElements» является зарегистрированной торговой маркой. Любое воспроизведение торговой марки может быть осуществлено только с разрешения правообладателя.
Если вы соедините клемму 1 (разрешение) с GND, двигатель будет остановлен независимо от клемм управления In1 и In2. Контакт разрешения включает и выключает все. Это очень полезно при использовании ШИМ-контактов для управления скоростью двигателя. Подключите контакт 1 к 5 В, чтобы двигатель снова начал вращаться.
Технические параметры Motor shield l293d.
- Напряжение питания двигателя: 5 — 36 В
- Напряжение питания платы: 5 В
- Допустимый ток нагрузки: 600 мА на канал
- Максимальный ток нагрузки (пиковый): 1,2 А на канал
- Размер платы: 70x54x20 мм
Моторный щит основан на драйвере L293D, который состоит из двух Н-мостов, способных управлять двумя двигателями постоянного тока или одним шаговым двигателем. Каждый канал имеет номинальный ток 0,6 А и максимальный ток 1,2 А. Моторный щит с двумя микросхемами L293D позволяет управлять до четырех двигателей постоянного тока, что дает возможность использовать щит при разработке роботизированных платформ. В щите также используется сдвиговый регистр 74HC595, который соединяет 4 цифровых вывода Arduino с 8 управляющими выводами двух модулей L293D. Подробнее о регистре сдвига 74HC595 вы можете узнать в учебнике: Урок 2 — Подключение регистра сдвига 74HC595 к Arduino. Глава 2.2.2 «Операционное освещение
Питание Motor shield L293D:
- Общий источник питаниядля Arduino и двигателей (максимальное напряжение 12 В) — можно использовать блок питания, используйте разъем DC на Arduino UNO или 2-контактный разъем на моторном щите «EXT_PWR», также должна быть установлена перемычка «PWR».
- Отдельный источник питания — Рекомендуется подавать питание на Arduino и экран отдельно. Для этого Arduino подключается к источнику постоянного тока через USB-разъем, а двигатели — через разъем «EXT_PWR». Перемычка «PWR» должна быть снята.
Предупреждение. Не подавайте на «EXT_PWR» напряжение более 12 В, пока перемычка «PWR» подключена.
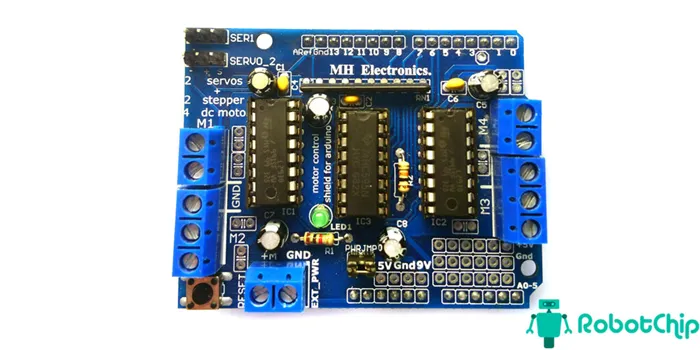
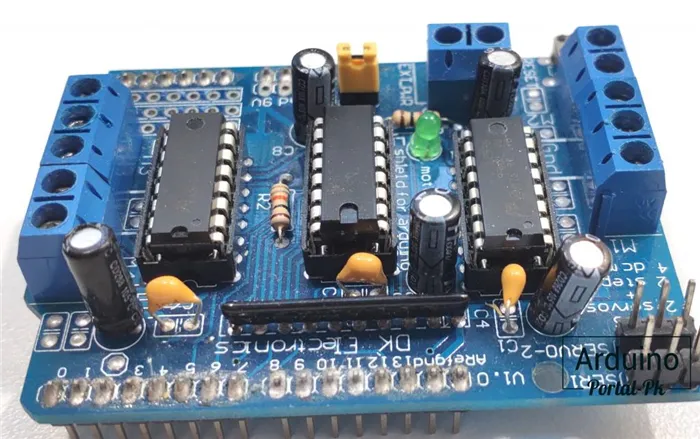
Выходные контакты двух ИС L293D выведены на стороны экрана через 5-полюсные винтовые клеммы, т.е. M1, M2, M3 и M4. К этим клеммам подключены четыре двигателя постоянного тока и два шаговых двигателя.
На щите также есть два 3-полюсных гнезда, к которым можно подключить два серводвигателя.
Контакты, которые не используются Motor shield L293D:
Поскольку щит установлен на Arduino UNO, есть контакты, не используемые моторным щитом, к которым можно подключить дополнительные компоненты. Это цифровые контакты D2 и D13 и аналоговые контакты A0-A5. Вы также можете припаять контакты A0-A5 к экрану и подключить их непосредственно к экрану.
Подключение к Motor shield L293D двигателя постоянного тока.
Для этого нам понадобятся следующие детали:
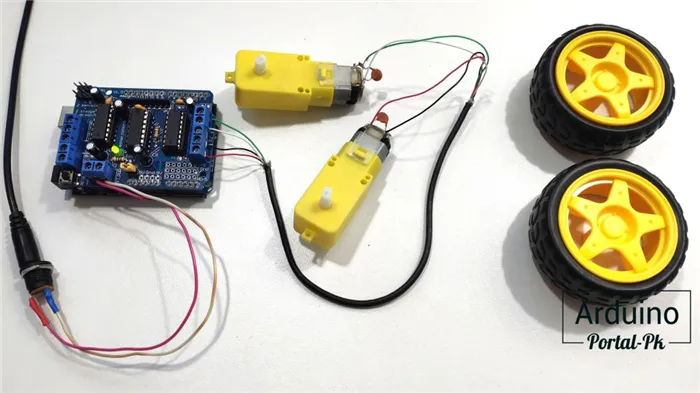
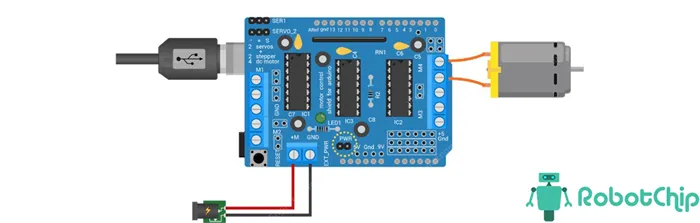
Схема подключения двигателя постоянного тока к Motor shield.
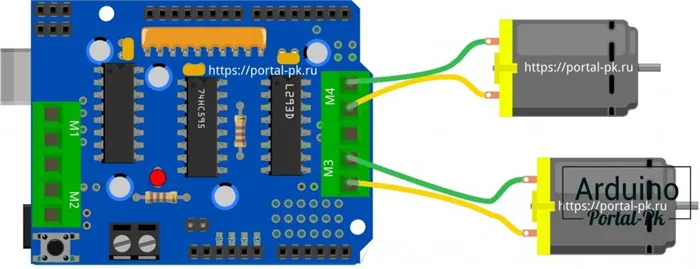
Установите экран на Arduino, затем подключите источник питания к контактам «EXT_PWR», в данном примере мы используем источник питания 12 В. Теперь подключите двигатели к клеммам M1, M2, M3 или M4. В примере мы подключаем 2 двигателя постоянного тока к M4, M3.
Установка библиотеки «AFMotor.h»
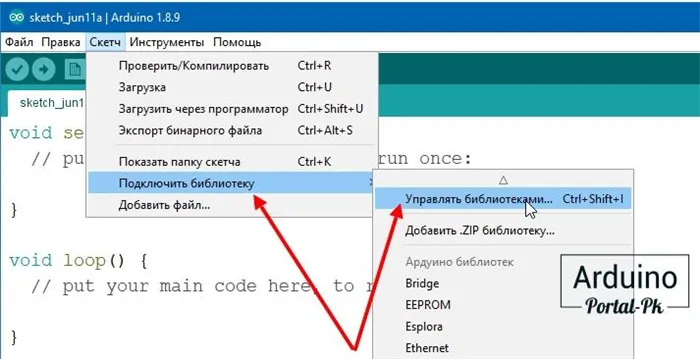
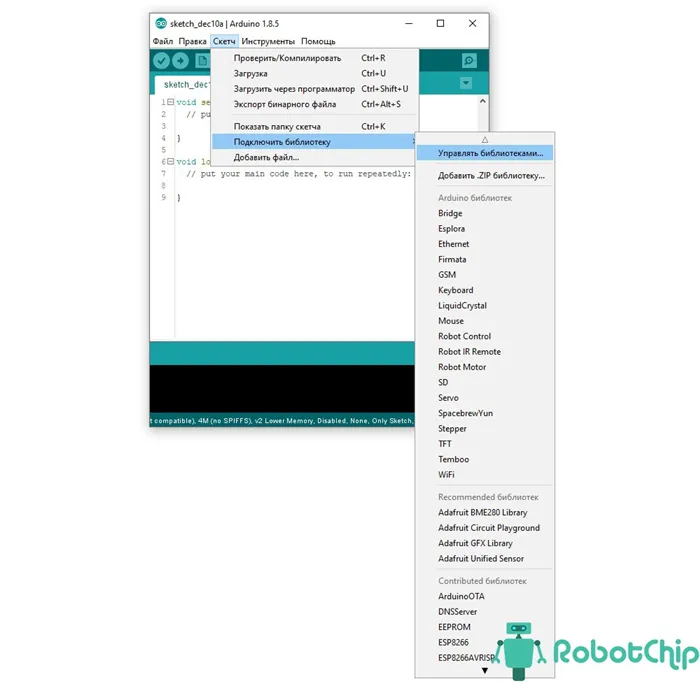
Для удобной работы с Motor shield L293D, необходимо установить библиотеку « AFMotor.h ». Заходим в Arduino IDE, открываем вкладку « Скетч -> Подключить библиотеку -> Управление библиотекой… «
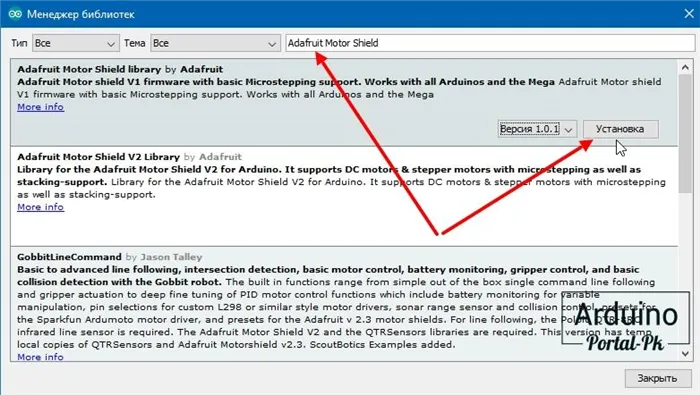
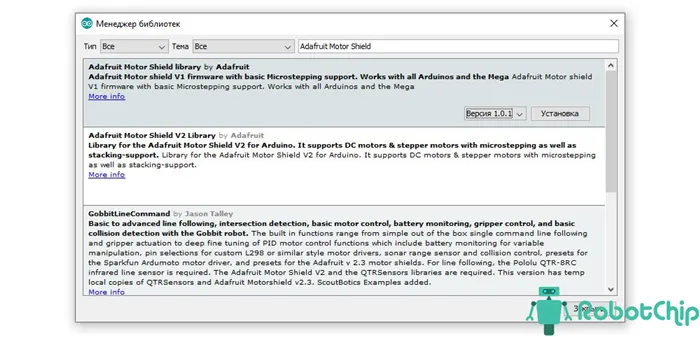
Откроется новое окно «Library Manager», в окне поиска введите «Adafruit Motor Shield» и установите библиотеку.
После подключения моторного щита L293D к Arduino нам необходимо подключить остальные компоненты. Правильное подключение показано на следующем рисунке.
Обзор motor shield l293d
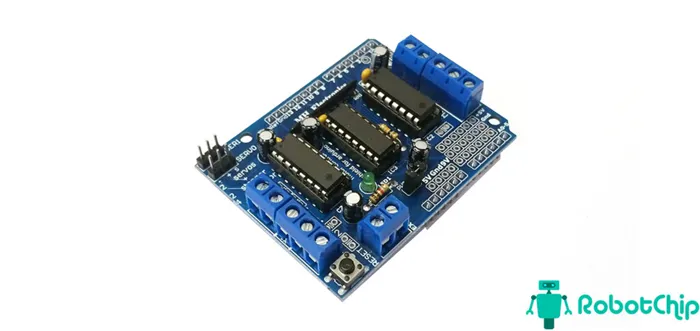
Если вы хотите сконструировать робота, вам необходимо сначала научиться управлять различными двигателями, будь то двигатель постоянного тока или серводвигатель. Одним из самых простых и дешевых способов является использование моторного щита на базе L293D, который можно легко установить на плату Arduino UNO.
Технические параметры
► Напряжение питания двигателя: 5 — 36 В ► Напряжение питания платы: 5 В ► Допустимый ток нагрузки: 600 мА на канал ► Максимальный ток нагрузки (пиковый): 1,2 А на канал ► Размер платы: 70x54x20 мм ► Размер платы: 70x54x20 мм
Моторный экран основан на чипе L293D, который состоит из двух H-мостов, которые могут использоваться для управления двумя двигателями постоянного тока или одним шаговым двигателем. Каждый канал имеет номинальный ток 0,6 А и максимальный ток 1,2 А. С помощью двух микросхем L293D в щите можно управлять до четырех двигателей постоянного тока, что позволяет использовать их при разработке роботизированных платформ. На щите также установлена микросхема 74HC595, которая соединяет 4 цифровых вывода Arduino с 8 управляющими выводами двух микросхем L293D.
Источник питания для моторного щита L293D: ► Общий источник питания для Arduino и двигателей (максимальное напряжение 12 В) — вы можете использовать один источник питания, используя гнездо постоянного тока Arduino UNO или 2-контактное гнездо щита «EXT_PWR», также необходимо установить перемычку «PWR». Отдельный источник питания — рекомендуется питать Arduino и экран отдельно. Для этого Arduino подключается к порту USB через разъем «EXT_PWR», а двигатели подключаются к источнику постоянного тока. Вы должны снять перемычку «PWR».
Предупреждение. Не подавайте на «EXT_PWR» напряжение выше 12 В, если установлена перемычка «PWR».
Выходные контакты двух ИС L293D выведены на стороны экрана через 5-полюсные винтовые клеммы, а именно M1, M2, M3 и M4. К этим клеммам подключены четыре двигателя постоянного тока и два шаговых двигателя.
Также есть два 3-контактных разъема, которые можно использовать для подключения двух серводвигателей.
Неиспользуемые клеммы: Цифровые клеммы D2 и D13 и аналоговые клеммы A0-A5 не используются.
Подключение к Arduino двигателя постоянного тока с помощью L293D
Необходимые запасные части: ► Arduino UNO R3 x 1 шт. ► Источник питания 12 В, 2A x 1 шт. ► Кабель USB 2.0 A-B x 1 шт. ► Двигатель постоянного тока x 21 шт. ► Щит двигателя L293D ► Щит двигателя L293D
Соединение. В данном примере используется источник питания 9 В. Теперь подключите двигатели к клеммам M1, M2, M3 или M4. В данном примере подключение осуществляется к M4.
Установка библиотеки: Для удобной работы с Motor shield L293D необходимо установить библиотеку « AFMotor.h». Заходим в Arduino IDE, открываем вкладку « Скетч » -> «Подключить библиотеку» и нажмите «Управление библиотеками…».
Откроется новое окно «Library Manager», введите в окне поиска «Adafruit Motor Shield» и установите библиотеку.
Программа : Этот скетч показывает, как управлять скоростью и направлением вращения двигателя постоянного тока.
После подключения моторного щита L293D к Arduino нам необходимо подключить остальные компоненты. Правильное подключение показано на следующем рисунке.
Платы ARDUINO по низкой цене
Нажми на изображение, чтобы заказать в интернет-магазине:


Сейчас 10/13/22 12:25:48, ваш IP: 65.21.235.222; arduino.zl3p.com/modules/l293d ePN