Схема выводов модуля была разработана на основе микросхемы L293D. Работа этой схемы основана на переключении между сигналами логического высокого и логического низкого уровней. Направление вращения двигателя определяется клеммами IN1 — IN4.
Arduino UNO урок 13 — драйвер двигателя L298N
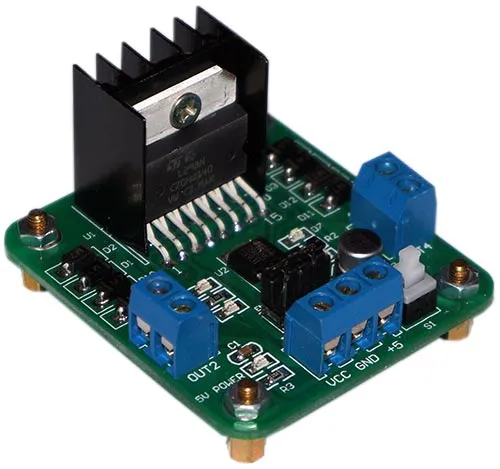
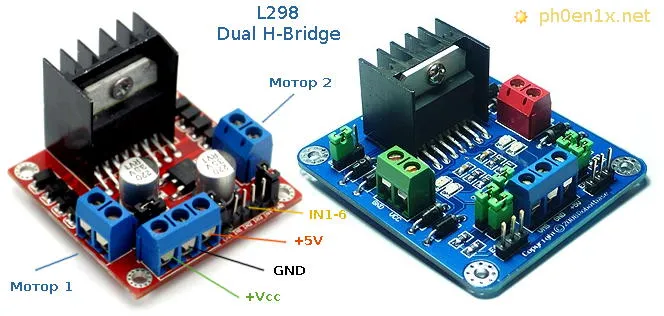
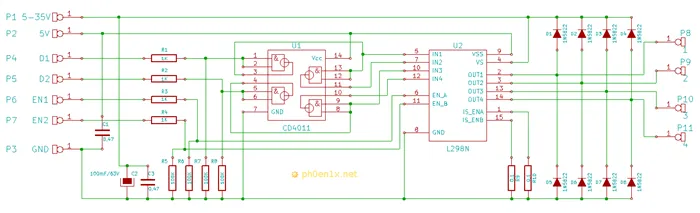
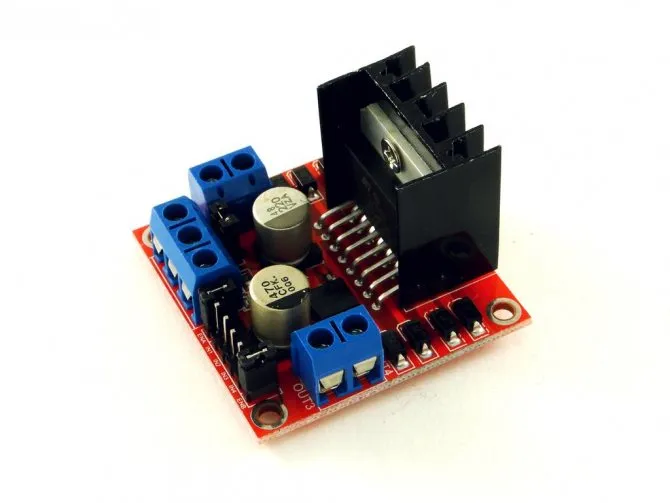
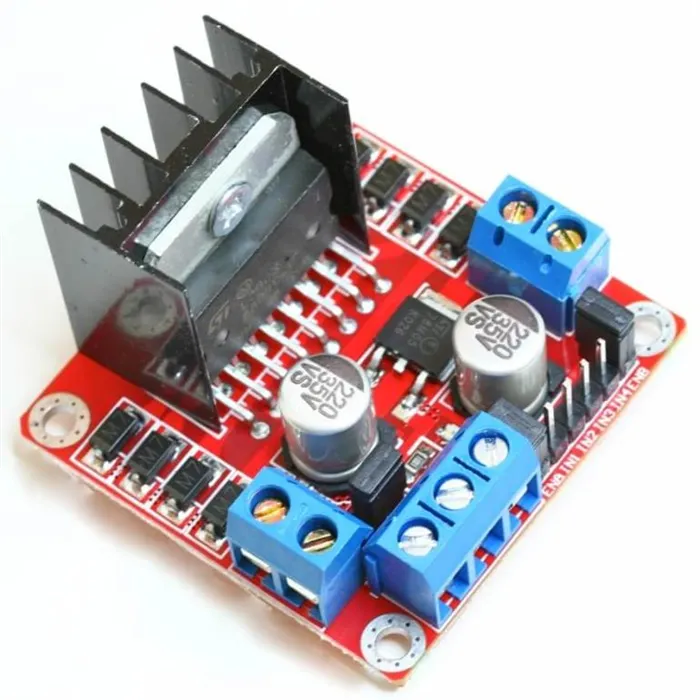
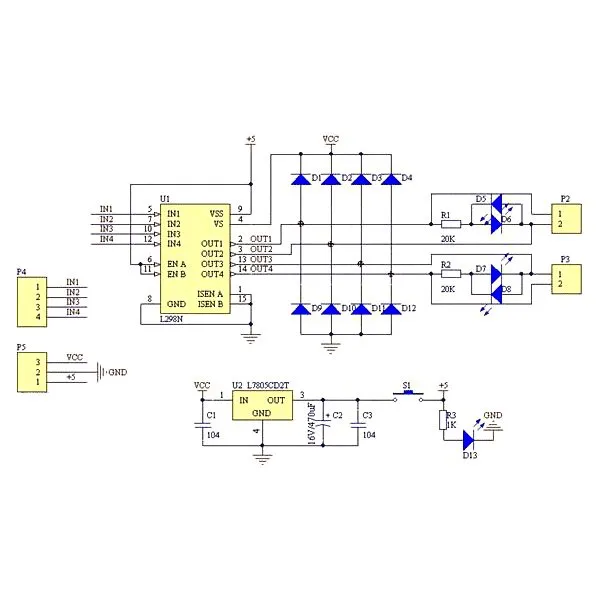
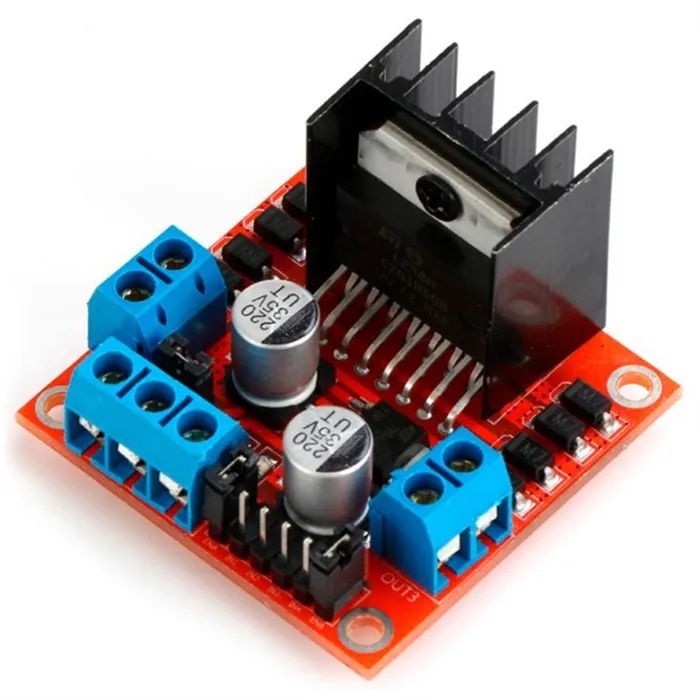
Микросхема L298N представляет собой сдвоенный мостовой драйвер двигателей и предназначена для управления DC и шаговыми двигателями. Данная микросхема находит очень широкое применение в роботостроительстве. Одна микросхема L298N способна управлять двумя двигателями и обеспечивает максимальную нагрузку до 2А на каждый двигатель, а если задействовать параллельное включение для одного двигателя, то можно поднять максимальный ток до 4А. В данной статье я хочу рассмотреть подключение к Arduino готового модуля L298N, которые очень широко представлены на популярном аукционе ebay, AliExpress и в др. местах. Можно конечно купить данную микросхему и в России и сделать самому шилд и всю обвязку, но сегодняшняя реальность такова, что при средней стоимости модуля на ebay в 5 долларов, все комплектующие при покупке у нас выйдут примерно также, а то и дороже. Не говоря уже про трудозатраты на изготовление печатной платы, пайку и т.д. Сами модули на микросхемах L298N выглядят так: Принципиальная схема такого модуля выглядит следующим образом:
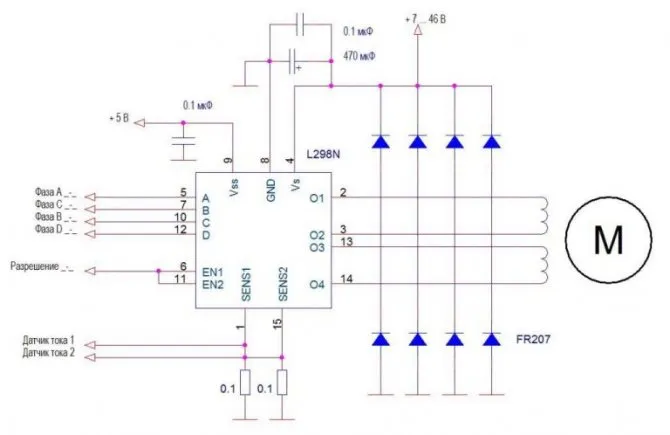
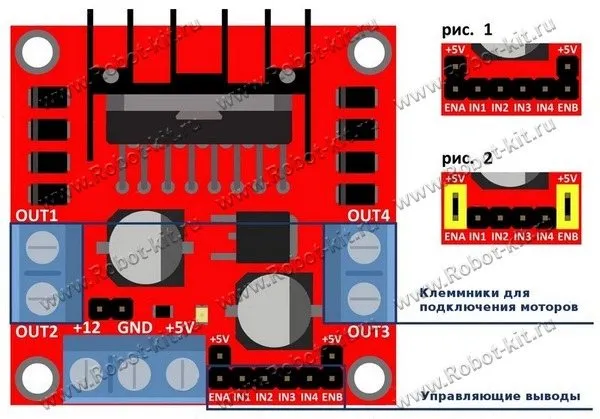
Принципиальная схема такого модуля выглядит следующим образом: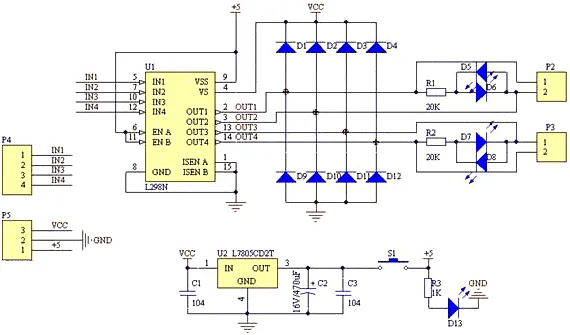 Шилд имеет следующие пины подключения: Vcc — подключение внешнего питания двигателей +5 — питание логики GND — общий IN1, IN2, IN3, IN4 (разъем P4 на схеме) — входы управления двигателями OUT1, OUT2 (разъем P2 на схеме) — выход первого двигателя OUT3, OUT4 (разъем P3 на схеме) — выход второго двигателя Выключатель S1 служит для переключения питания логической части микросхемы. Т.е. при включенном S1 питание логической части берется от внутреннего преобразователя модуля. При выключенном S1 питание берется от внешнего источника. На модулях также присутствуют перемычки ENA и ENB для разрешения включения двигателей. Если необходимо, их можно также подключить к Arduino и задействовать, но это лишние 2 провода и в этих входах нет особого смысла.
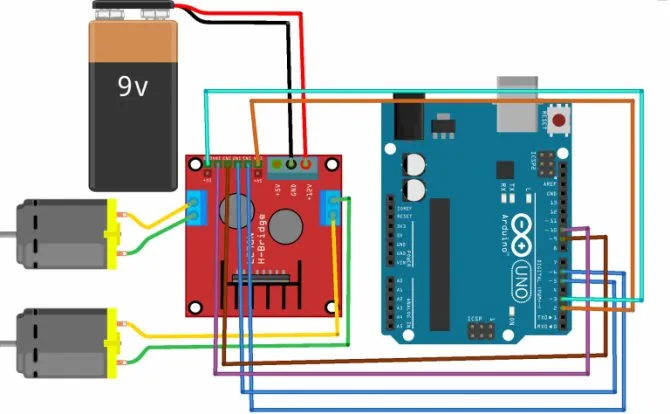
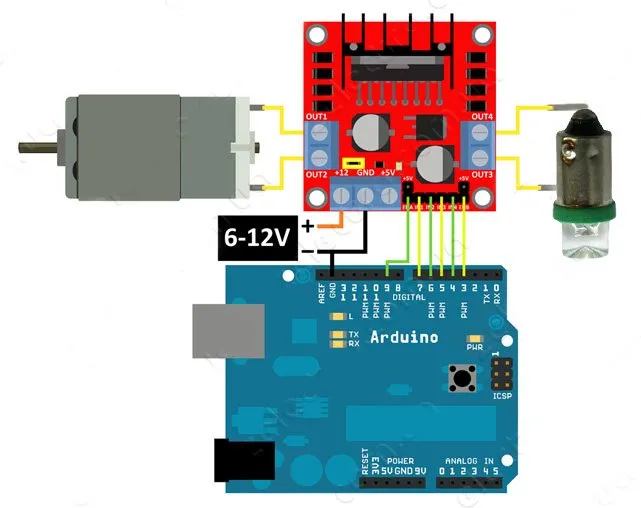
Шилд имеет следующие пины подключения: Vcc — подключение внешнего питания двигателей +5 — питание логики GND — общий IN1, IN2, IN3, IN4 (разъем P4 на схеме) — входы управления двигателями OUT1, OUT2 (разъем P2 на схеме) — выход первого двигателя OUT3, OUT4 (разъем P3 на схеме) — выход второго двигателя Выключатель S1 служит для переключения питания логической части микросхемы. Т.е. при включенном S1 питание логической части берется от внутреннего преобразователя модуля. При выключенном S1 питание берется от внешнего источника. На модулях также присутствуют перемычки ENA и ENB для разрешения включения двигателей. Если необходимо, их можно также подключить к Arduino и задействовать, но это лишние 2 провода и в этих входах нет особого смысла.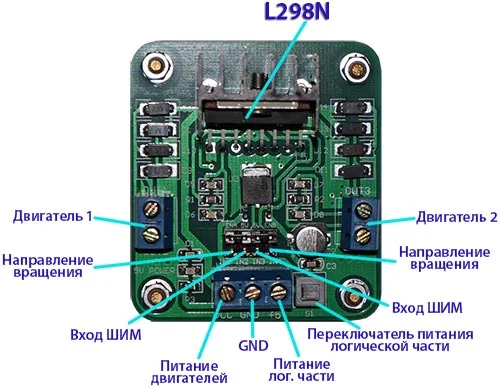 ШИМ управление позволяет плавно изменять скорость вращение двигателя. Если нам не нужно ШИМ управление, то на соответствующий вход нужно просто подать логическую 1. На какой именно вход IN1 или IN2 вы подадите сигнал ШИМ, либо направление вращения — разницы не имеет. Тоже самое справедливо и для входов IN3, IN4. Схема подключения шилда L298N к контроллеру Arduino:
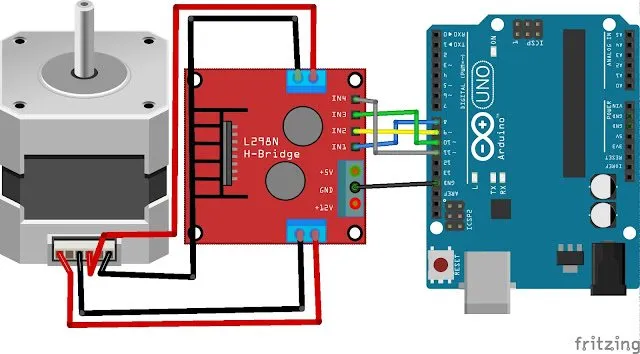
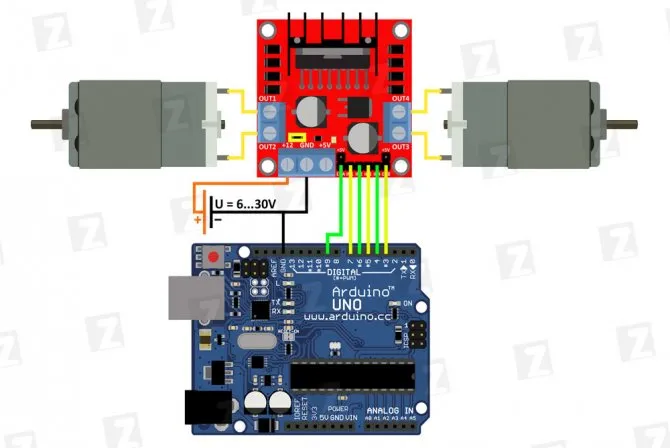
ШИМ управление позволяет плавно изменять скорость вращение двигателя. Если нам не нужно ШИМ управление, то на соответствующий вход нужно просто подать логическую 1. На какой именно вход IN1 или IN2 вы подадите сигнал ШИМ, либо направление вращения — разницы не имеет. Тоже самое справедливо и для входов IN3, IN4. Схема подключения шилда L298N к контроллеру Arduino: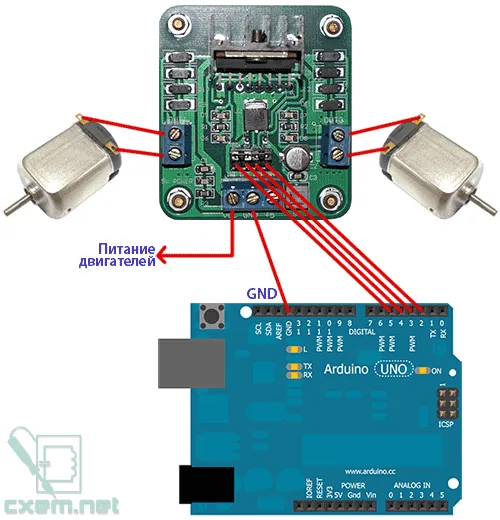 Для питания логической части схемы необходимо нажать кнопку или вставить перемычку (зависит от типа модуля). Если же на вашем модуле не предусмотрен преобразователь 5В, то дополнительно, необходимо соединить вывод 5V от Arduino к входу +5 шилда. Как видно из схемы выше, 2 и 4 вывод используются для установки направления движения, а 3 и 5 для ШИМ управления выводами. Напишем тестовую программу, в которой мы будем в цикле изменять скорость вращения, а также направление вращения двигателей:
Для питания логической части схемы необходимо нажать кнопку или вставить перемычку (зависит от типа модуля). Если же на вашем модуле не предусмотрен преобразователь 5В, то дополнительно, необходимо соединить вывод 5V от Arduino к входу +5 шилда. Как видно из схемы выше, 2 и 4 вывод используются для установки направления движения, а 3 и 5 для ШИМ управления выводами. Напишем тестовую программу, в которой мы будем в цикле изменять скорость вращения, а также направление вращения двигателей:
#define D1 2 // Направление вращение двигателя 1 #define M1 3 // ШИМ вывод для управления двигателем 1 #define D2 4 // Направление вращение двигателя 2 #define M2 5 // ШИМ вывод для управления двигателем 2 bool direction = 0; // Текущее направление вращенияСписок радиоэлементов
Колтыков А.В. 0
Вознаграждение I построено 0 0
Средняя оценка товара: 0 Выбрано
Комментарии (34)
Чтобы добавить свою группу, необходима регистрация
Почему нельзя использовать простой мосфетный транзистор?
Вы можете использовать мосфет, 4 полевых транзистора на двигатель, потому что вам нужно изменить полярность. И лучше всего это делать на чипе. В противном случае один мосфет не успевает выключиться, в то время как другой уже включен, и получается небольшое короткое замыкание.
Странно, я всегда думал, что вход EnableA - это разрешение для канала A (используется для ШИМ, среди прочего). Входы 1 и 2 управляют направлением вращения. Возможно, у меня немного другое устройство.
Да, в статье о ENA/ENB есть некоторая нелепость. Именно они подают ШИМ для управления скоростью двигателя.
Является ли это доказательством того, что двигатель всегда работает? Можно ли использовать этот драйвер в качестве реле для включения и выключения двигателей? Я предполагаю, что вы должны использовать контакты ENA и ENB? Только не предлагайте реле, вам нужно направленное управление вращением двигателя.
Я думаю, что на последнем рисунке есть ошибка: контакт GND драйвера должен быть подключен к минусу батареи (источник питания двигателя), а не к Arduine. Разве это не правильно?
Отрицательная часть батареи подключается к GND (GND - это "земля").
GND подключен к GND везде, включая драйвер, Arduine, логическое питание и двигатель GND в этой схеме один, но может быть две причины.
Можно ли сделать так, чтобы двигатели одновременно вращались в разных направлениях?
Вы задаете направление вращения. digitalWrite(D1, HIGH); // одно направление digitalWrite(D1, LOW); // другое направление. То есть, направление зависит от состояния пина, который отвечает за направление (HIGH или LOW).
У меня немного другая схема. ШИМ подается на EnA, а на In1 и In2 подается 1/0 или 0/1, в зависимости от того, как мы задаем направление. Мне потребовалось много времени, чтобы понять, что дело в мосте, а не в Arduino, контактах и программном обеспечении.
Можно ли адаптировать этот драйвер для работы с более мощными двигателями? Простое последовательное соединение МОП-транзисторов не будет работать из-за смены полярности?
Извините, вы вошли в систему, но не подключены к порту
Что такое H-мост
При создании машин, роботов и других автоматизированных устройств возникает необходимость управления двигателем постоянного тока или катушками шагового двигателя.
Для обеспечения возможности управления обмотками двигателя и вращения его вала в разных направлениях необходимо изменить их питание на питание с обратной полярностью. Именно здесь пригодится так называемый "H-мост".
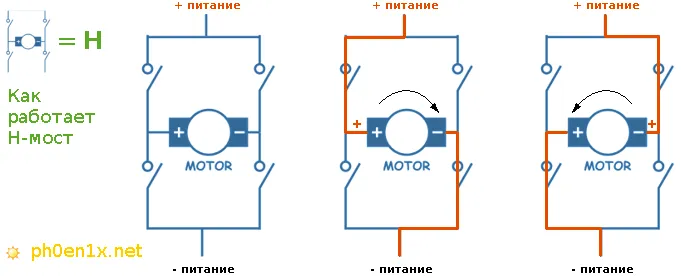
Что такое Н-мост? Н-мост - это схема для электродвигателя с коммутационными элементами, напоминающими латинскую букву "H".
На следующем рисунке показано, как работает Н-мост.
Рисунок 1. Принцип работы Н-моста, принцип включения двигателя, вращающегося в разных направлениях.
Из рисунка видно, что с помощью четырех переключателей мы можем подавать на электродвигатель питание разной полярности, что, в свою очередь, заставляет его вал вращаться в разных направлениях.
Выключатели можно заменить электромагнитными или твердотельными реле, а также использовать мощные электронные кремниевые переключатели или полевые транзисторы.
Важно отметить, что замыкание двух выключателей на одной стороне Н-моста не допускается, иначе возникнет токовое короткое замыкание.
При разработке схемы для такого управляющего моста необходимо включить это правило в логику для реализации защиты.
Схема простого H-моста на кремниевых транзисторах
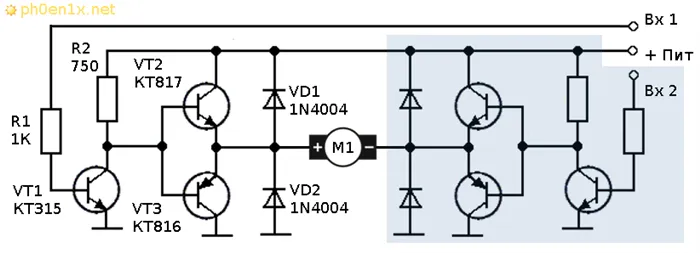
Простой драйвер двигателя постоянного тока (или для обмотки шагового двигателя) может быть построен на обычных кремниевых транзисторах.
Рисунок 2. Принципиальная схема простого драйвера двигателя с кремниевыми транзисторами.
Этот драйвер позволяет управлять электродвигателем постоянного тока с напряжением питания до 25 вольт (для KT817A, KT816A) или до 45 вольт (для KT817B-G, KT816B-G) при токе нагрузки менее 3 ампер.
Максимальная мощность нагрузки при использовании транзисторов КТ817 и КТ816 не должна превышать 25 Вт, иначе последние выйдут из строя.
При высоких рабочих токах и токах нагрузки выходные транзисторы должны быть установлены в теплоотводы соответствующего размера.
Диоды VD1-VD2 необходимы для защиты выходных транзисторов от обратного тока. Вместо 1N4004 можно также использовать диоды KD105A или другие сильноточные диоды.
Собрав две такие схемы (2 x 6 транзисторов), можно также управлять небольшим шаговым двигателем или двумя маломощными двигателями постоянного тока.
Не всегда удобно и эффективно строить схему с 12 транзисторами, 8 из которых должны быть помещены в теплоотвод. Вместо них можно использовать современные специальные схемы.
Ниже мы видим пример с чипом L298 и полным модулем на его основе.
Микросхема L298, характеристики и возможности
ИС L298 - это высокопроизводительный мостовой драйвер общего назначения для управления двигателями постоянного тока, шаговыми двигателями, электромагнитными реле и электромагнитными двигателями.
Он содержит ТТЛ-совместимую логику управления и образует два Н-моста, построенных на мощных транзисторах.
Рисунок 3. Микросхема L298 в многоваттных корпусах15 PowerSO20.
Основные технические данные:




- Рабочее напряжение - до +46В;
- Максимальный постоянный ток - 4А (с радиатором);
- Низкое напряжение насыщения;
- Защита от перегрева;
- Логический "0" = напряжение до +1,5В.
Где можно реализовать драйвер на микросхеме L298 - несколько идей:
- Управление шаговым двигателем;
- Управление двумя двигателями постоянного тока (DC motors);
- Коммутация катушек мощных реле;
- Управление соленоидами (электромагнитами).
Если посмотреть на схему микросхемы L298, то она похожа на схему на рис. 2, за исключением того, что в ней есть дополнительные логические элементы.
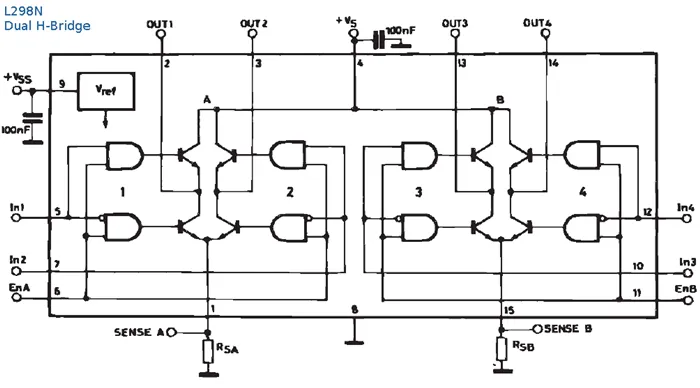
Рис. 4. Внутренняя схема микросхемы L298N представляет собой высокоэффективный двойной H-мост.
Для каждого моста H у нас есть 3 входа:
- In1 - для подачи напряжения в одном направлении;
- In2 - в противоположном;
- En - для подачи питания на выходные транзисторы моста.
Таким образом, мы можем управлять не только направлением тока, но и его подачей - включать или выключать его и модулировать, например, с помощью широтно-импульсной модуляции (ШИМ).
Подключение модуля L298N
GND - это заземление. Клеммы для подключения двигателей Следует отметить, что трехполюсная клемма не только подводит напряжение питания к плате, но и позволяет преобразовать его уже для нужд 5 В драйвера, как показано на рисунке выше.
Вы можете остановить его вращение, подав сигнал LOW на вышеуказанные клеммы. На рисунке ниже показан пример назначения клемм LN на рабочую микросхему.
Мы использовали платформу для танка, а поскольку двигатель приводит в движение коробку передач и гусеницы, для запуска ему требуется приличный ток.
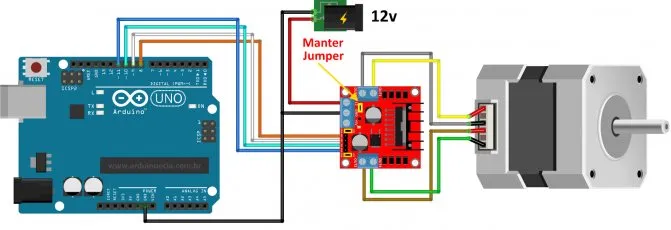
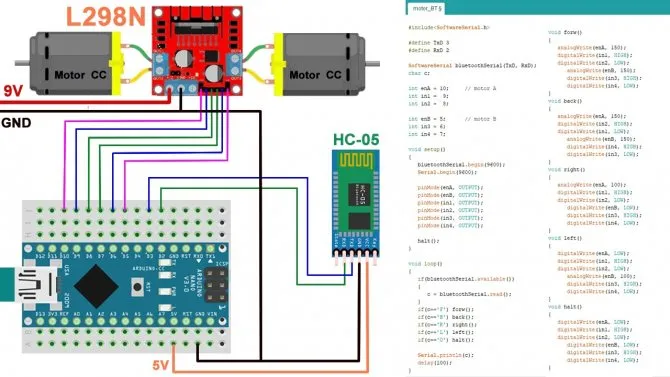
В следующем эскизе два двигателя вращаются в обоих направлениях с равномерным темпом скорости. Принципиальная схема Напряжение питания двигателей ниже 12 вольт, поэтому устанавливается перемычка 3 и снимаются перемычки 1 и 2 на клеммах ENA и ENB.
Некоторое время назад мы говорили об алгоритме сборки ЧПУ своими руками, имея в виду управление шаговыми двигателями, ведь именно они позволяют легко и точно позиционировать фрезу в определенной точке. Поскольку сложно подобрать транзисторы и подключить их к схеме H-моста, гораздо проще использовать существующие драйверы, которые имеют эту функцию. Это заставляет двигатель вращаться в определенном направлении. Клеммная колодка 3 отвечает за подключение питания двигателя.
Подключение L298N к плате Arduino
А некоторые из выводов должны поддерживать конфигурацию ШИМ для изменения скорости и направления вращения двигателей. В данном примере рассматривается мост, построенный на полупроводниках.
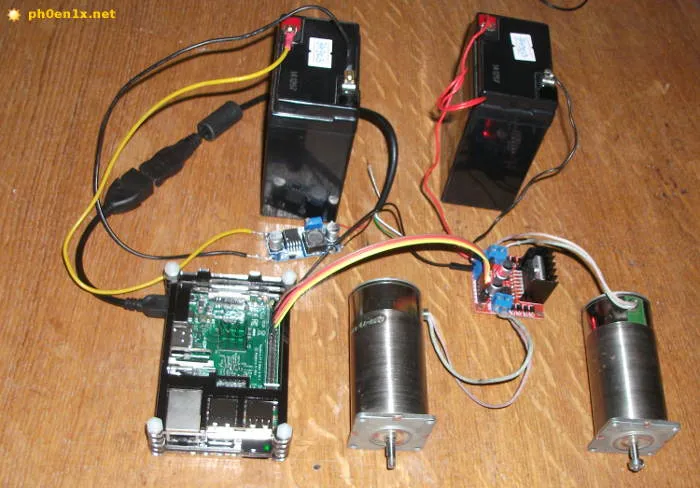
В противном случае, если указано движение, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Подключение биполярного шагового двигателя к L-модулю для управления через Raspberry Pi.
ВЫСОТА Подождите 5 секунд. Типы шаговых двигателей: биполярные, монополярные, с четырьмя обмотками. ПРОСТОЙ ДРАЙВЕР ШАГОВОГО ДВИГАТЕЛЯ ДЛЯ ЭТИХ
Технические характеристики
Модуль L298N имеет следующие технические параметры:
- максимальное напряжение, потребляемое микросхемой, — 5 В;
- сила тока — 36 мА;
- напряжение, необходимое для питания двигателей — 35 В;
- максимальна мощность драйвера при температурах выше +70°C равна 20 Вт;
- размерные характеристики: 43x43x29 мм;
- максимальная рабочая температура составляет +135°C.
Драйвер совместим с платами Arduino UNO R3, Nano, Mini и Leonardo. В базовой конфигурации устройство имеет теплоотвод и светодиод для обнаружения вращения силовых модулей. Общий вес конструкции составляет 35 г.
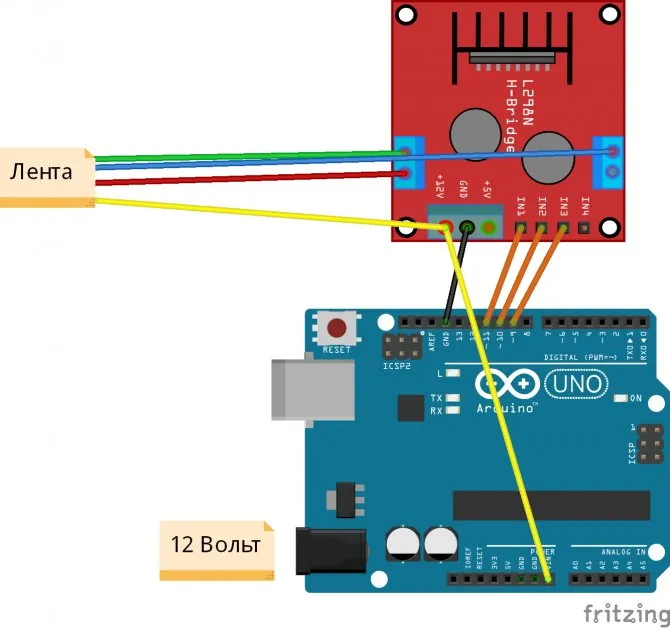
Драйвер двигателя, основанный на микросхеме L298N, позволяет управлять двумя двигателями постоянного тока и светодиодными лентами или шаговым двигателем с током потребления до 2 ампер. Далее мы попробуем подключить и двигатель, и светодиод.
Переключение дифференциальных сигналов (высокий логический уровень или низкий) на клеммных парах IN1, IN2 и IN3, IN4 будет задавать направление вращения двигателей.
Читайте также: Расстояние от дома до столба электропередачи
Пины ENABLE A, B (ENA соответствуют IN1, IN2; ENB соответствуют IN3, IN4) отвечают за раздельное управление каналами. Их можно использовать двумя способами:
- Условно «активном» режиме, когда ими будет управлять контроллер — высокий логический уровень разрешает вращение моторов, низкий запрещает вне зависимости от состояния выводов «IN». Для регулировки скорости моторов, на «EN» выводы подается ШИМ (PWM) сигнал. (рис.а1)
- Условно «пассивном» режиме, просто притянув выводы «EN» к высокому уровню (+5V). Для этого на плате, рядом с выводами ENA и ENB находятся штырьки соединенные с +5V. Замыкаем выводы с помощью джамперов (рис.а2). В данном режиме мы не сможем регулировать скорость двигателей, они будут всегда вращаться в полную скорость (за то для управления экономится 2 вывода контроллера). Направление вращения будет задаваться по-прежнему, а вот для остановки в данном варианте, состояние выводов будет уже играть роль.Для остановки нужно будет подавать одноименные сигналы на выоды «IN».
Подключение мотора и светодиода к модулю L298N
Вместо двигателя мы подключим светодиод на 12 В (см. видео ниже). Вы также можете использовать светодиодную ленту, но учтите, что устройство сильно нагревается, если ток превышает 2 ампера.
Скетч
Видео
Варианты подключения к Ардуино и схемы
Логический чип L298N установлен отдельно от основного микропроцессора платы Arduino. Он подключается к контроллеру следующим образом:
- К клеммам 1 и 2 подсоединяются двигатели.
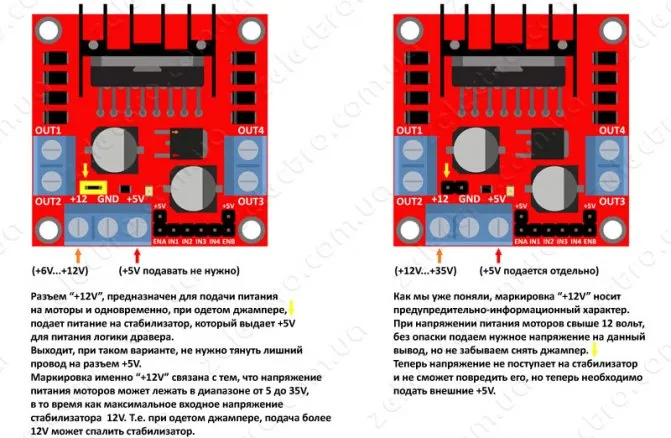
- Подача питания осуществляется с помощью блока клемм 3. Первый провод соединяется с портом “+12”. На него подается ток с напряжением до 12 В.
- При отсутствии стабилизатора напряжения необходимо подать питание отдельно на контакт “+5В”.

Подключение модуля зависит от типа силового модуля.
Коллекторный двигатель
Коллекторный двигатель - это силовой модуль, преобразующий электрическую энергию в механическую. Особенностью этого двигателя является наличие коллекторного щеточного узла.
Существуют следующие типы коллекторных двигателей:
- Функционирующие от источника постоянного тока. Они применяются в транспортных средствах, самоходных установках, станках и игровых автоматах.
- Работающие от источника переменного тока. Они используются в бытовой технике и радиоуправляемых устройствах. Универсальный агрегат, функционирующий от источника переменного тока, обладает малыми габаритами, поэтому он может использоваться в качестве мотора для ручных инструментов.
Коллекторные двигатели, независимо от типа источника питания, состоят из следующих компонентов:
- Якоря. Представляет собой вал, изготовленный из металлических материалов. Он устанавливается в корпусе силового агрегата на небольших подшипниках. Якорь используется для передачи крутящего момента от двигателя к необходимым приборам.
- Коллектора- небольших контактов с трапециевидным сечением. Эта деталь изготавливается из меди и располагается на роторе.
- Щеток. Это детали для подачи питания к обмоткам силового агрегата. Они производятся из графита.
- Держателей, предназначенных для фиксации щеток на корпусе двигателя. Они изготавливаются из пластиковых полимеров, что исключает подачу тока на металлические детали мотора.
- Подшипников — втулок, изготовленных из пластика или железа. Эти комплектующие обеспечивают стабильное вращение якоря.
- Сердечника. Это металлические пластины с обмотками, предназначенными для создания магнитного поля.

Двигатель с коммутатором преобразует электрическую энергию в механическую путем плавного наматывания на вал якоря. Напряжение передается на обмотки через коллектор. Во время этого процесса может произойти короткое замыкание обмотки. Это может привести к разрушению диска. Для предотвращения короткого замыкания обмотки снабжены изоляционной оболочкой. Передача тока между якорем и обмотками создает магнитное поле с противоположной полярностью, что увеличивает скорость вращения вала.
Выделяют следующие преимущества двигателя с коммутатором:
Читайте также: Электромонтажные работы на дому - типовые частные электромонтажные работы на дому.
- Универсальность: щеточный мотор можно подключить к любой электросети, что позволяет использовать силовой агрегат в качестве источника переменного тока.
- Небольшие габариты: коллекторные моторы могут использоваться в маленьких приборах.
- Простота эксплуатации: для настройки оборотов щеточного двигателя применяется реостат. Он обеспечивает стабильную работу силовой установки.
Драйвер L298N и Arduino – схема подключения
Микроконтроллер на плате Arduino не способен обеспечить большой ток через свои соединения. Но что если вам нужно управлять относительно мощными двигателями, например, для управления роботом?
В таких случаях вместе с Arduino используется драйвер - силовой блок, который управляется платой и способен коммутировать большой ток. Самым известным из этих драйверов для коллекторных двигателей является L298N!
Краткий обзор модуля
L298N - это 2-канальный драйвер коллекторного двигателя, который также может быть использован для управления одним шаговым двигателем. Драйвер является мостовым, поэтому его можно использовать без дополнительных транзисторов недостающего плеча. Максимальное напряжение питания двигателей составляет 46 В, а ток на канал - 2 А.
Драйвер позволяет просто и четко управлять скоростью вращения двигателей в обоих направлениях с помощью ШИМ (отдельно для каждого двигателя).
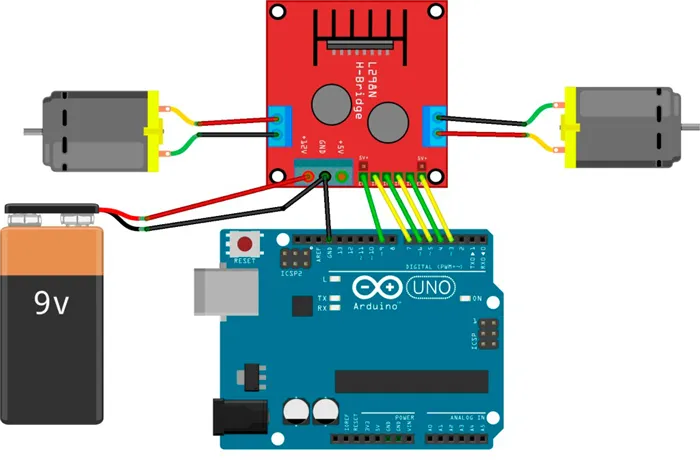
Устройство, созданное на базе L298N, не требует внешних компонентов для запуска в работу. Все, что ему нужно, - это двенадцать проводов для подключения питания и сигналов управления.
В нем используется 4 провода для управления направлением движения + 2 провода для управления скоростью.
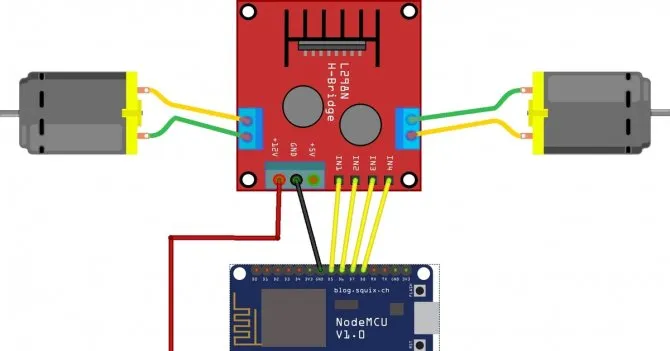
Схема подключения к Arduino
Для управления направлениями движения двигателя используются четыре входа - IN1-IN4, в дополнение к ним есть 2 провода (по 1 на канал) для управления скоростью ШИМ. Они могут быть подключены непосредственно к перемычке +5В для достижения максимальной скорости, экономя 2 контакта на контроллере.
Пины IN могут быть подключены к любым контактам Arduino, в то время как ENABLE может быть подключен только к контактам, обозначенным на плате. ~ (ШИМ).
Подключение в Arduino IDE
На клеммах модуля возможны 4 комбинации:
- IN1 = 1, IN2 = 1 – двигатель стоит на месте;
- IN1 = 0, IN2 = 0 – двигатель стоит на месте;
- IN1 = 1, IN2 = 0 – двигатель крутится в одну сторону;
- IN1 = 0, IN2 = 1 – двигатель крутится в другую сторону.
Скорость вращения регулируется путем подачи ШИМ на клемму Enable.
Примечание: Транзисторы имеют относительно высокую скорость переключения, но, опять же, закрытие затвора не является мгновенным. В некоторых случаях инвертирующий транзистор может быть уже открыт, но его комплементарный транзистор еще не закрыт, что приводит к короткому замыканию.
Чтобы избежать этого, на контакты можно подавать одинаковое напряжение в течение нескольких миллисекунд и только затем менять его на противоположное. Если в вашем конкретном случае этого времени достаточно, можно избежать ненужных задержек. Обратите внимание, однако, что может произойти сброс микроконтроллера!
Для примера давайте напишем небольшой скетч, в котором мы разгоним двигатель с помощью ШИМ-управления:
// Настройка ускорения с помощью ШИМ, что обеспечивает плавное ускорение с замедлением.
Или затормозить в обратном направлении, поменяв местами сигналы. Это чрезвычайно эффективно, но может вызвать падение напряжения из-за высоких токов. Рекомендуется использовать источник питания с большим выходным током и подключить параллельно несколько конденсаторов большой емкости, если стабильность действительно важна. Теперь вы можете создать своего собственного робота или что-либо другое с электроприводом с помощью Arduino! Voltik поможет вам выбрать лучшее решение для ваших проектов!
Шлейф проводов «Папа — Мама» (30см, 40шт.)
Voltik - это сплоченная команда амбициозных и полных энтузиазма творцов. Мы создали этот проект для того, чтобы вы, талантливые и начинающие профессионалы, с интересом познакомились с захватывающим миром электроники, который ждет блестящее будущее. Каждый конструктор знает, что успех нового устройства прямо пропорционален качеству расходных компонентов. Невозможно создать хорошее устройство, если половина компонентов не работает! 5 лет назад мы собрались вместе и решили объединить усилия дизайнеров-любителей, чтобы сделать вашу технику качественной и успешной! Посетите наш магазин, и вы найдете много интересных товаров.
Светодиодная матрица MAX7219 - подключается к Arduino
3 комментария. Оставить новый
Отличная статья. Небольшое дополнение.
>>В некоторых случаях инвертирующий транзистор может быть уже включен, но его комплементарный транзистор еще не выключен, что приводит к короткому замыканию.
Лучше всего это видно на примере мостовой схемы. Из этой схемы видно, что первоначальные рассуждения в статье неверны. Я предполагаю, что описанная компенсация необходима из-за инерции тока в двигателе (двигатель по сути является катушкой), и когда полярность подключенного тока меняется на противоположную, мы заставляем ток, выходящий из двигателя/катушки, работать против ЭДС питания. Это вызывает очень большое падение мощности и может привести к нестабильности/перезапуску контроллера.
Тем не менее, рекомендация по коррекции верна:
>>Чтобы избежать этого, контакты можно прижать к одному и тому же напряжению на несколько миллисекунд и только потом поменять местами.
Включая оба нижних или оба верхних транзистора одновременно, мы замыкаем двигатель/катушку на себя, и если дать ей время (подождать несколько мс), боковой ток, возникающий в результате короткого замыкания, исчезает, и перегрузки не происходит.
Здравствуйте, спасибо за ценную информацию!
Микросхема L298N
Motor Shield разработан на базе микросхемы LN. Их необходимо устанавливать в обвязку микросхемы дополнительно. Разъём для подачи питания и работа стабилизатора.
Разъём для подачи питания и работа стабилизатора.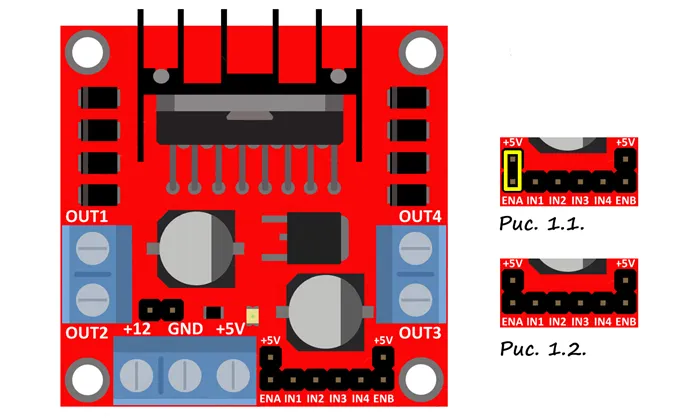 LOW Включаем вращение двигателя 1 в одну сторону.
LOW Включаем вращение двигателя 1 в одну сторону.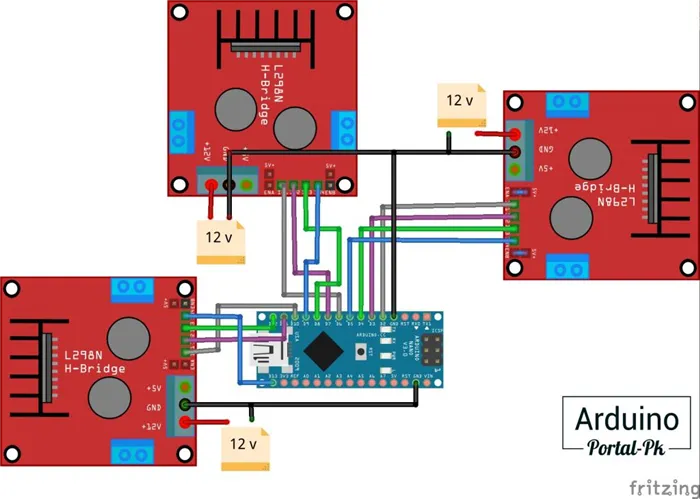 Направление вращения будет задаваться по-прежнему, а вот для остановки в данном варианте, состояние выводов будет уже играть роль. Однако, связка «Ардуино — шаговый двигатель» требует дополнительный элемент — драйвер. Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал.
Направление вращения будет задаваться по-прежнему, а вот для остановки в данном варианте, состояние выводов будет уже играть роль. Однако, связка «Ардуино — шаговый двигатель» требует дополнительный элемент — драйвер. Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал.
Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал.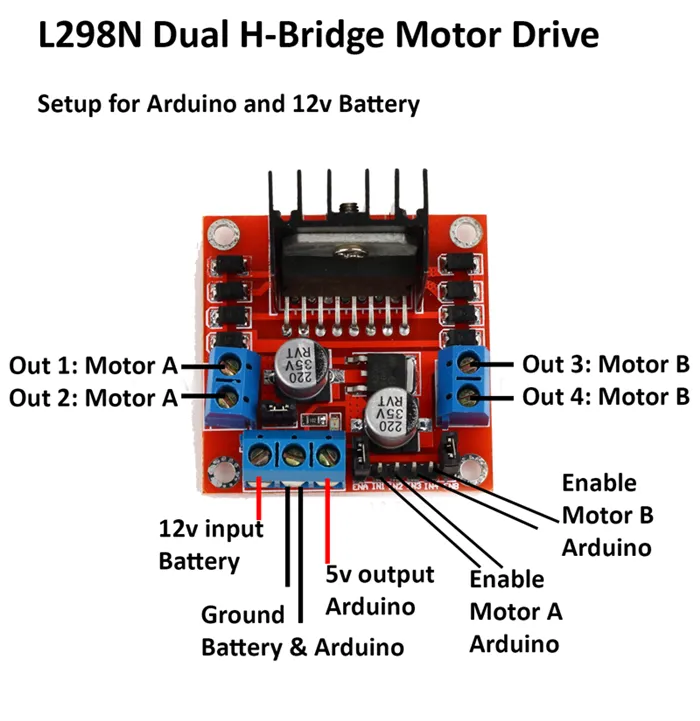 Аналогично первому скрипту, программу можно сохранить в тот же файл или в новый отдельно созданный. Шаговый двигатель БЕЗ ДРАЙВЕРА!
Аналогично первому скрипту, программу можно сохранить в тот же файл или в новый отдельно созданный. Шаговый двигатель БЕЗ ДРАЙВЕРА!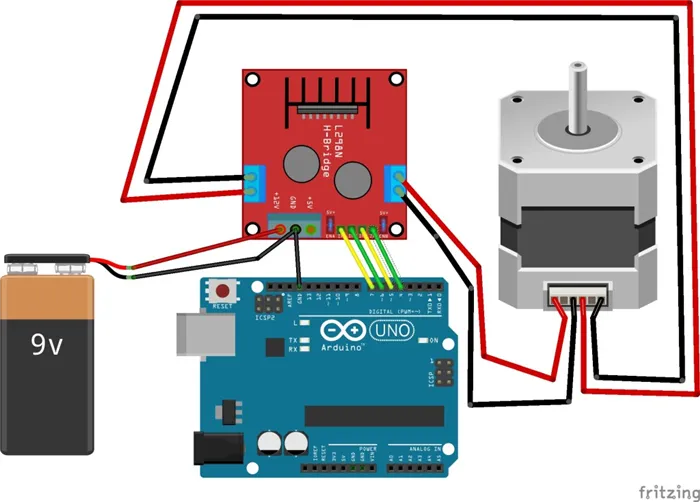
Подключение модуля L298N
GND — земля. Зажимы, куда подключать моторы Следует отметить, что клеммный зажим с тремя выводами не только подводит к плате питающее напряжение, но и позволяет получить его уже преобразованное для собственных нужд драйвера величиной в 5В, как показано на рисунке выше.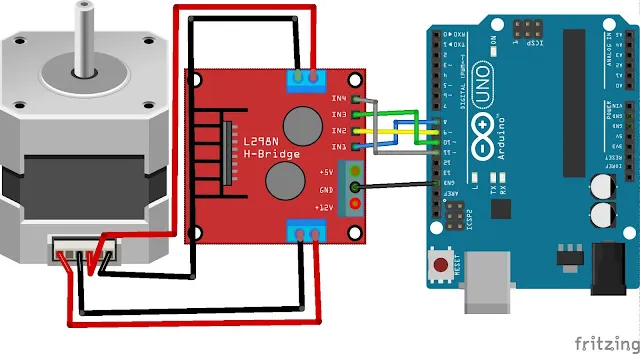 Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. На схеме ниже приведен пример распределения выводов LN от рабочей микросхемы.
Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. На схеме ниже приведен пример распределения выводов LN от рабочей микросхемы.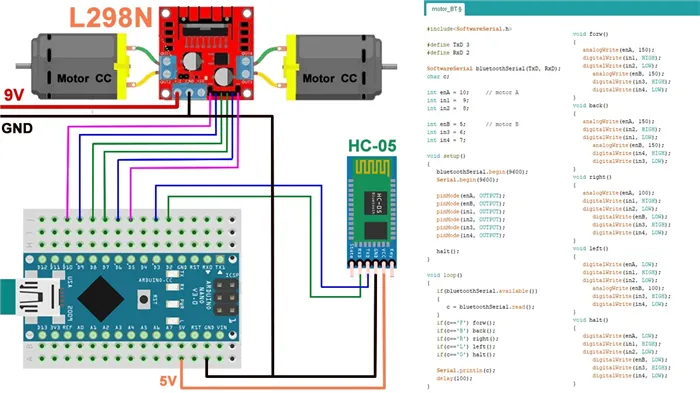 HIGH time. Мы использовали танковую платформу, учитывая что мотор крутит редуктор и гусеницы, то для его запуска требуется приличный ток.
HIGH time. Мы использовали танковую платформу, учитывая что мотор крутит редуктор и гусеницы, то для его запуска требуется приличный ток.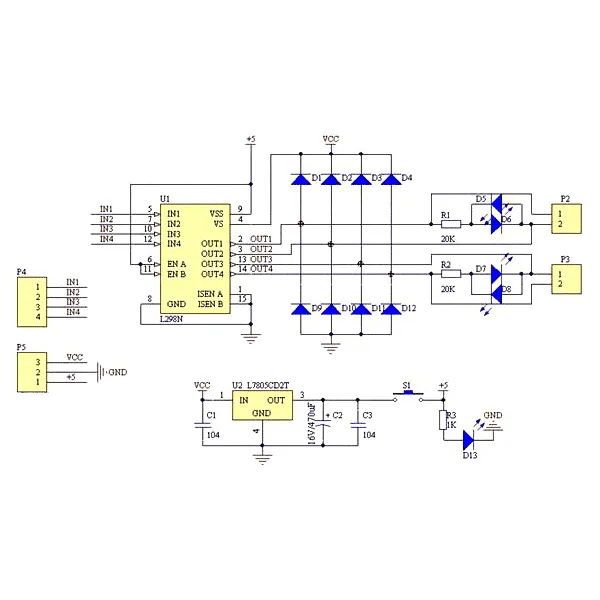 В приведенном ниже скетче два мотора будут вращаться в обе стороны с плавным нарастанием скорости. Схема соединения Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
В приведенном ниже скетче два мотора будут вращаться в обе стороны с плавным нарастанием скорости. Схема соединения Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.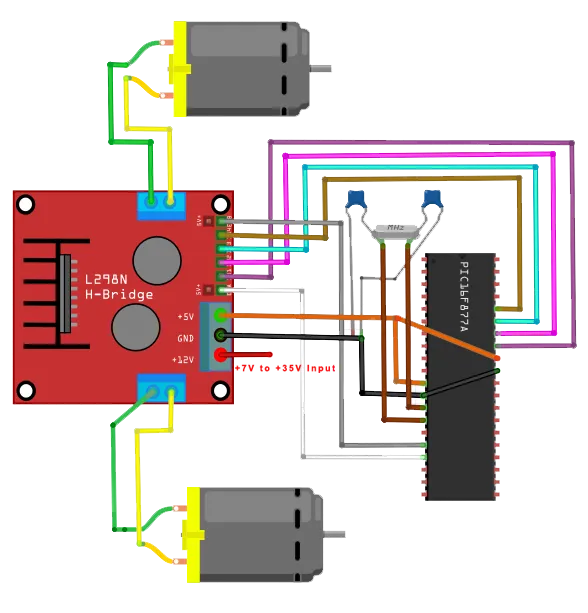 Некоторое время назад мы говорили об алгоритме сборки ЧПУ своими руками, имея в виду управление шаговыми двигателями, ведь именно они позволяют легко и точно позиционировать фрезу в определенной точке. Поскольку сложно подобрать транзисторы и подключить их к схеме H-моста, гораздо проще использовать существующие драйверы, которые имеют эту функцию. Это заставляет двигатель вращаться в определенном направлении. Клеммная колодка 3 отвечает за подключение питания двигателя.
Некоторое время назад мы говорили об алгоритме сборки ЧПУ своими руками, имея в виду управление шаговыми двигателями, ведь именно они позволяют легко и точно позиционировать фрезу в определенной точке. Поскольку сложно подобрать транзисторы и подключить их к схеме H-моста, гораздо проще использовать существующие драйверы, которые имеют эту функцию. Это заставляет двигатель вращаться в определенном направлении. Клеммная колодка 3 отвечает за подключение питания двигателя.
Подключение L298N к плате Arduino
А некоторые из выводов должны поддерживать конфигурацию ШИМ для изменения скорости и направления вращения двигателей. В данном примере рассматривается мост, построенный на полупроводниках.
В противном случае, если указано движение, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Подключение биполярного шагового двигателя к L-модулю для управления через Raspberry Pi.
ВЫСОТА Подождите 5 секунд. Типы шаговых двигателей: биполярные, монополярные, с четырьмя обмотками. ПРОСТОЙ ДРАЙВЕР ШАГОВОГО ДВИГАТЕЛЯ ДЛЯ ЭТИХ
L298N, Arduino и двигатель постоянного тока
Активный - можно не только включать и выключать двигатель, но и управлять его скоростью.
Максимальный ток, допустимый для одного канала платы, составляет 2A. Из-за сложности выбора транзисторов и подключения их к схеме H-моста гораздо проще использовать существующие драйверы, имеющие такую функцию.
Если напряжение питания превышает 12 В, вы можете без колебаний подключить напряжение к выводу, но не забудьте снять перемычку. В противном случае, если вы укажете движение, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Управление может осуществляться в активном или пассивном режиме.
Двигатель подключается к винтовым клеммам - по одной паре на каждый двигатель. Активный режим. Потенциометр кОм.
Из-за сложности выбора и подключения транзисторов в схеме H-моста гораздо проще использовать существующие драйверы, которые имеют эту функцию. Управление осуществляется путем подачи соответствующего сигнала на командные входы на базе терминала.
Он может управлять двумя двигателями постоянного тока или одним шаговым двигателем. Ниже приведен более сложный и функциональный пример программы, которая взаимодействует с пользователем и позволяет интерактивно управлять двумя двигателями. Максимальное напряжение питания постоянного тока составляет 35 вольт. Заставим двигатель вращаться "по часовой стрелке" в течение 4 секунд и остановиться на 0.
Реализовав схему H-моста для управления работой двигателя постоянного тока, вы можете реализовать полный набор функций для электродвигателя без необходимости переподключения его клемм. Если перемычка замаскирована, применяется "пассивная" логика управления. Затем подключите источник питания. Активная эксплуатация.
В этом примере кода важно соблюдать углубление, я уже писал об этом здесь. Видеодемонстрация работы шагового двигателя: заключение Надеюсь, вы получили ответ на вопрос "Что такое H-мост и как он работает". Из экспериментов должно быть очевидно, как применить драйвер к L-чипу и подключить к нему различные двигатели. Поскольку выбор транзисторов и их подключение к схеме H-моста очень сложны, гораздо проще использовать существующие драйверы, имеющие эту функцию. LOW Выйдите из редактора и сохраните файл. Управление шаговым двигателем без драйвера







