Двигатель, который мы хотим проверить, подключен к выходным контактам двигателя A. Поэтому нам нужно подключить контакты ENABLE A, INPUT1 и INPUT2 драйвера двигателя к ESP32.
Ардуино: драйвер L298N для мотора постоянного тока
Для управления вращением двигателя каждому контроллеру требуется специальное устройство, часто называемое драйвером. В учебнике «Управление двигателем постоянного тока» мы уже проверили два способа запуска двигателя и его вращения в разных направлениях: с помощью одного транзистора и с помощью микросхемы-драйвера L293D.
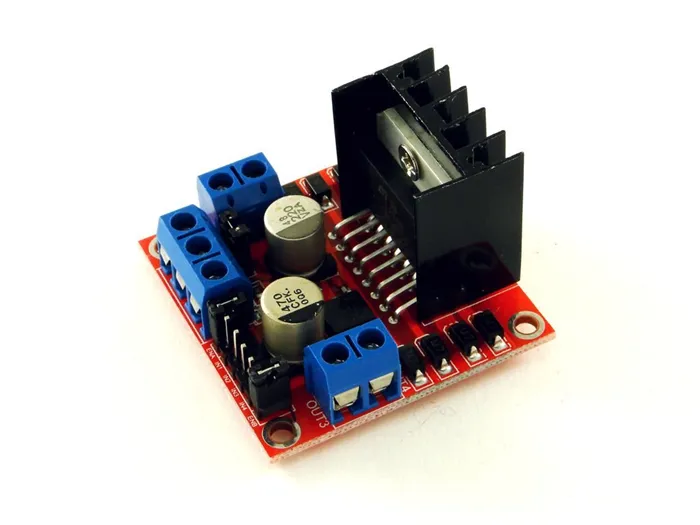
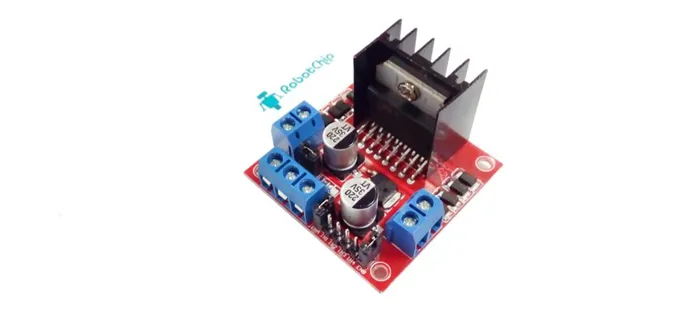
На этот раз мы попробуем более мощный двухканальный драйвер L298N, который часто встречается в виде красного модуля (хотя также доступны зеленые и синие модели).
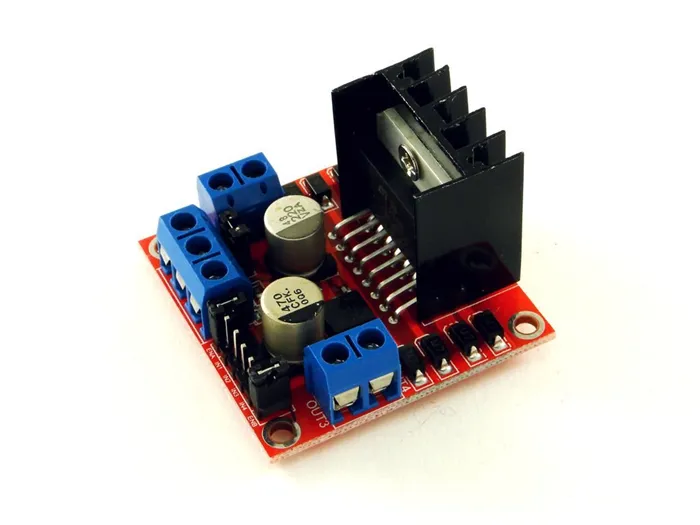
Как и L293N, драйвер представляет собой мост полного Н, основная функция которого заключается в изменении полярности нагрузки. Если нагрузкой является двигатель постоянного тока, изменение полярности меняет направление его вращения. Это то, что нам нужно.
Технические характеристики модуля L298N:
- Напряжение питания двигателя: до 35 В,
- Рабочий ток (на канал): 2 A,
- Рабочий ток (80% включено, 20% выключено): 2,5 A;
- Ток короткого замыкания: 3 A,
- Вес: 33 г.
Драйвер L298N работает при более высоком токе, чем L293D. С помощью L298N мы можем управлять как слабыми двигателями типа n20, так и сильными двигателями типа JGA25 или даже JGA37 с крутящим моментом до 20-25 кг/см. Достаточно для большинства проектов DIY!
Назначение элементов и контактов на плате драйвера L298N
Давайте рассмотрим устройство подробнее, чтобы понять его связи.
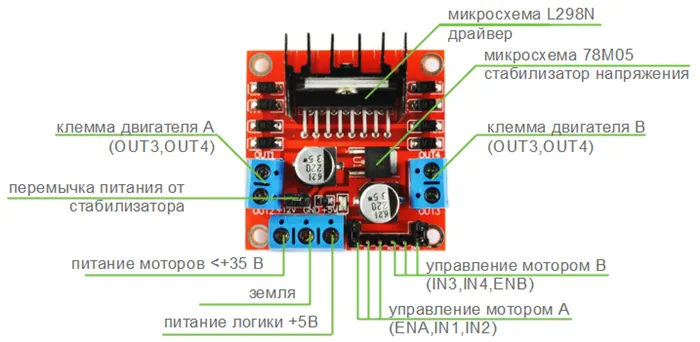
Логическая микросхема L298N питается от напряжения 5 вольт. Для этой цели в модуле предусмотрен регулятор напряжения 78M05. На вход этого регулятора напряжения может подаваться напряжение до 35 В, а на выходе всегда 5 В. 78M05 имеет низкий рабочий ток до 500 мА. Однако, при желании, его можно использовать и для питания самой платы Arduino Uno, к которой мы подключим драйвер.
Тройная клемма в нижней части отвечает за питание модуля. Крайняя слева клемма является источником питания для двигателя. Сюда можно подавать до 35 В. Средний контакт является заземлением, которое должно быть общим для модуля и блока управления. Правый контакт выполняет двойную функцию. Когда стабилизатор замкнут на блок, на этом контакте присутствует +5 В, и вы можете либо ничего не подключать, либо подавать питание на контроллер через этот контакт. Однако, если вы удалите перемычку, вы должны подключить +5 В от контроллера к этой клемме для питания драйвера. В данном примере мы рассматриваем вариант без перемычки.
Две другие винтовые клеммы (OUT1/2 и OUT 3/4) используются для подключения двигателей. Следует отметить, что двигатели постоянного тока не полярны, но направление вращения зависит от того, какая клемма двигателя положительная, а какая отрицательная.
Наконец, остается работа с контактами управления. На каждый двигатель приходится по три штуки. С помощью контактов ENA и ENB вы можете управлять двигателями посредством ШИМ-сигнала. Если вы подключите ENA и ENB строго к +5 В, они всегда будут работать на максимальной скорости. Для этой функции на блоке рядом с ENA и ENB предусмотрены две перемычки.
Пины IN1,IN2,IN3,IN4 используются для управления работой двигателей. Таблица работы двигателя A выглядит следующим образом:
| Операция | ИН1 | IN1, IN2 |
| Однонаправленное вращение | 1 | 0 |
| Обратное вращение | 0 | 1 |
| Кинетическая подвеска | 1 | 1 |
| Двигатель выключен | 0 | 0 |
Последние две функции нуждаются в пояснении. Если нам нужно резко остановить двигатель, мы выбираем функцию блокировки. Для плавной остановки выберите «мотор выключен».
Подключение драйвера L298N к Ардуино Уно
Чтобы проверить драйвер в действии, мы подключаем его к контроллеру Arduino Uno и любому небольшому двигателю постоянного тока, который попадется нам под руку. В этом учебнике мы будем использовать самый простой двигатель с напряжением питания 1,5-3 вольта. Для приведения в действие этого двигателя нам нужны только две батареи. В данной схеме просто невозможно запитать микросхему драйвера от встроенного регулятора, поэтому мы будем брать +5В от Arduino.
Также обратите внимание, что в данной схеме подключения к внешнему питанию +5В, упомянутая выше перемычка (перемычка питания стабилизатора) должна быть удалена!
А поскольку мы хотим управлять скоростью, снимите перемычку с клеммы ENA.
Схематическая диаграмма
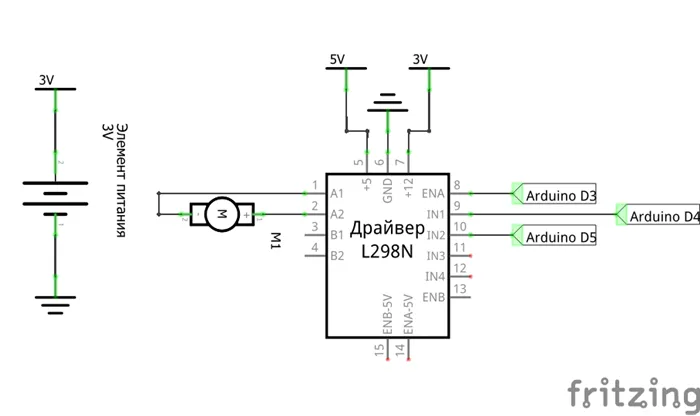
Макет
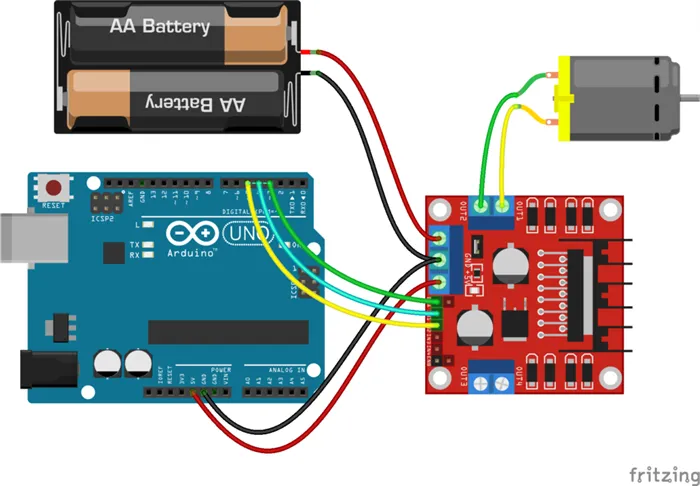
Двигатель, который мы хотим проверить, подключен к выходным контактам двигателя A. Поэтому нам нужно подключить контакты ENABLE A, INPUT1 и INPUT2 драйвера двигателя к ESP32.
Бесщеточный драйвер двигателя постоянного тока: схема и сборка
Описанная здесь схема использует ИС драйвера DRV10866 для управления небольшим вентилятором BLDC без датчиков положения. Использование бесщеточных двигателей постоянного тока (BLDC) постоянно растет. Однако для управления ими обычно требуется информация о положении ротора, чтобы выбрать соответствующий угол переключения. Обычно для определения положения ротора используется датчик эффекта Холла. Однако в приложениях, чувствительных к стоимости, часто желательна система переключения без датчиков. Описанная здесь схема драйвера для бесщеточного двигателя постоянного тока использует интегральную схему драйвера DRV10866 для привода небольшого вентилятора BLDC без датчиков положения. Скорость вентилятора BLDC может изменяться непрерывно без шагов, характерных для обычных вентиляторов переменного тока.
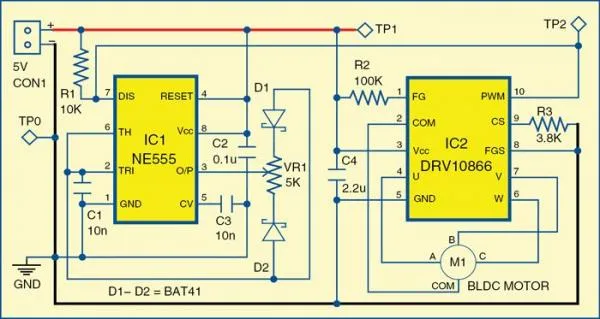
На рисунке 1 показана схема привода двигателя BLDC без датчика. Схема состоит из NE555 (IC1), DRV10866 (IC2) и некоторых других компонентов.
Рисунок 1: ИС драйвера бесщеточного двигателя постоянного тока DRV10866 от Texas Instruments используется для управления небольшим трехфазным двигателем BLDC (M1). Схема состоит из бессенсорного трехфазного драйвера двигателя со встроенными силовыми полевыми транзисторами с пиковым током до 680 мА. DRV10866 специально разработан для малошумных двигателей с небольшим количеством компонентов. Для управления трехфазным двигателем используется инверсная схема ЭМС без датчика 150°. На клемме 1 IC2 используется подтягивающий резистор 100 кОм (R2). Клеммы 2, 4, 7 и 6 IC2 подключены к общей фазе A, фазе B и фазе C двигателя BLDC соответственно. Клемма 10 IC2 соединена с клеммой 7 IC1 для приема сигнала широтно-импульсной модуляции (ШИМ) от IC1 для управления скоростью двигателя BLDC. Выходной сигнал (ШИМ) доступен на клемме 7 интегральной схемы (DIS), а не на клемме 3 ИС, как обычно. Рабочий цикл ШИМ-сигнала составляет (приблизительно) 25 кГц. Он может быть отрегулирован от 5% до 95% с помощью потенциометра VR1. Скорость двигателя BLDC может быть отрегулирована путем изменения коэффициента заполнения сигнала ШИМ. Поворот VR1 против часовой стрелки уменьшает рабочий цикл, что в свою очередь уменьшает скорость двигателя, и наоборот.
Сборка и тестирование
Односторонняя печатная плата для бесщеточного двигателя постоянного тока показана на рисунке 2, а расположение компонентов — на рисунке 3. Соберите схему на рекомендованной плате, чтобы свести к минимуму ошибки при сборке. IC2 должен быть установлен со стороны пайки на плате.
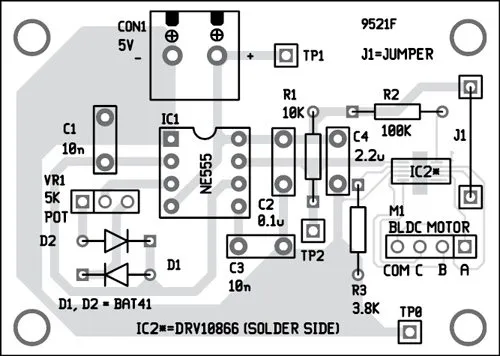
Рисунок 2: Односторонняя печатная плата для драйвера бесщеточного двигателя постоянного тока. Рисунок 3: Компонентная плата для печатных плат.
Загрузите печатную плату и схему расположения компонентов в формате PDF: Нажмите здесь.
После сборки компонентов подключите источник питания 5 В постоянного тока к разъему CON1. Чтобы проверить правильность работы этой схемы драйвера для бесщеточного двигателя постоянного тока, проверьте правильность подачи 5 В на схему на TP1 по отношению к TP0. Поверните VR1 по часовой стрелке или против часовой стрелки, чтобы увеличить или уменьшить скорость двигателя. Автор — бакалавр технических наук (электроника и связь) из GGSIPU, Нью-Дели.
Как бы то ни было, его реализация потребует дополнительных схем для усиления сигнала от шунтирующих резисторов и специального программного обеспечения для микроконтроллера. Но это выходит за рамки данной статьи.
Назначения выводов драйвера L293D:
- 1,2 EN, 3,4 EN — используются для управления ШИМ-сигналом.
- 1A, 2A, 3A, 4A — вход для управления направлением вращения двигателя.
- 1Y, 2Y, 3Y, 4Y — выходы для питания двигателя.
- Vcc1 — выход для логического питания контроллера +5 В.
- Vcc2 — выход питания двигателя от +4,5 В до +36 В.
В следующей таблице показано, как осуществляется управление L293D:
Если на входах A и EN высокий уровень, то на выходе с тем же номером также будет высокий уровень. Если на входе A низкий уровень, а на EN высокий, то на выходе будет низкий уровень. Если вы подадите на EN сигнал низкого уровня, выход будет иметь высокоомное состояние, независимо от того, какой сигнал подан на вход A.

Таким образом, мы можем контролировать направление протекания тока и иметь возможность изменить направление вращения двигателя.
Технические характеристики L293D:
- Напряжение питания: +5 В.
- Напряжение питания двигателя: от +4,5 В до +36 В.
- Выходной ток: 600 мА.
- Максимальный выходной ток (в импульсах) 1,2A.
- Рабочая температура от 0°C до 70°C.
Другой популярной микросхемой является L298. Это намного мощнее, чем L293D, описанный ранее. L298 имеет два Н-моста и также поддерживает ШИМ.

Распиновка L298 очень похожа на распиновку L293D. Он также имеет два входа управления, входы EN и выходы двигателя. Vss — источник питания микросхемы, а Vs — источник питания двигателя.
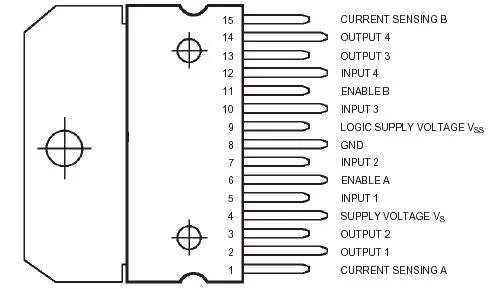
Есть и еще одно отличие — это контакты CURRENT SENSING, которые используются для измерения тока, потребляемого двигателями. Эти контакты должны быть соединены с землей источника питания через небольшой резистор (около 0,5 Ом). Ниже приведена принципиальная схема L298:
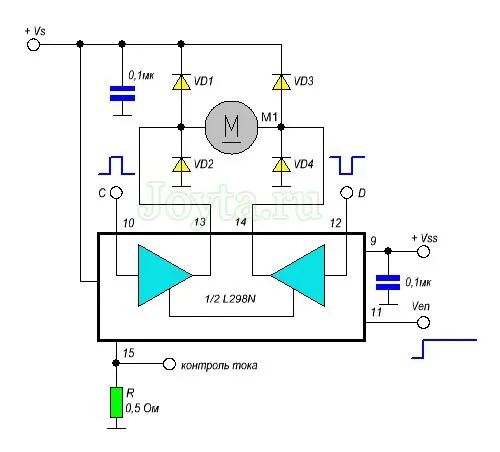
В этой схеме следует обратить внимание на внешние диоды, которые подключены к выводам двигателя. Они используются для рассеивания индуктивных перенапряжений в двигателе, возникающих при торможении и изменении направления вращения. Их отсутствие может привести к повреждению чипа. Драйвер L293D уже имеет эти диоды в самой микросхеме.
Технические характеристики L298:
- Напряжение питания: +5 В.
- Напряжение питания двигателя: до +46 В.
- Максимальный ток потребления двигателя: 4A.
Следующий чип H-моста — TB6612, новый драйвер с очень хорошими характеристиками, который становится все более популярным.
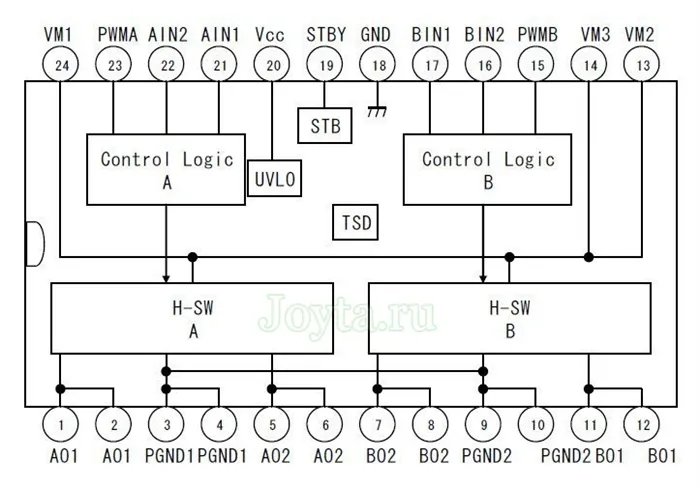
Вы заметите, что все эти драйверы двигателей имеют одинаковое управление, но у TB6612 выходы спарены из-за высокой мощности. TB6612 имеет максимальное напряжение питания 15 В и максимальный ток 1,2 А. В то же время максимальный импульсный ток составляет 3,2 А.







