Существует несколько способов расчета пускового тока асинхронного двигателя. Эти опции полезны, если значение причины не указано в технической документации или если сопроводительная документация была утеряна.
Асинхронный двигатель с короткозамкнутым ротором
Учитывая, что поставка электроэнергии традиционно осуществляется путем подачи переменного тока потребителю, понятно желание создать электродвигатели, работающие на подаваемой мощности. В частности, переменный ток широко используется в асинхронных двигателях, которые широко применяются во многих областях человеческой деятельности. Асинхронные двигатели с короткозамкнутым ротором требуют особого внимания и по ряду причин заняли прочные позиции в сфере применения.
Прежде всего, секрет их популярности заключается в простоте конструкции и низкой стоимости. Существуют и другие преимущества двигателей с короткозамкнутым сепаратором, о которых вы узнаете из этой статьи. Сначала рассмотрим конструктивные особенности этого типа электродвигателей.
Конструкция
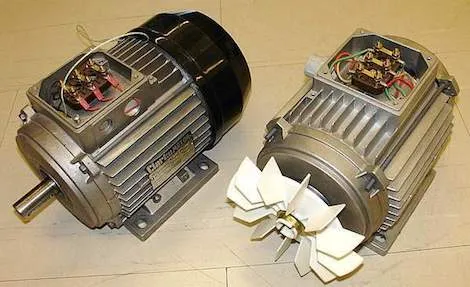
Все электродвигатели имеют две важные рабочие части: ротор и статор. Они заключены в защитный корпус. Для охлаждения проводников обмотки на валу ротора установлен вентилятор. Это общий принцип конструкции для всех типов электродвигателей.
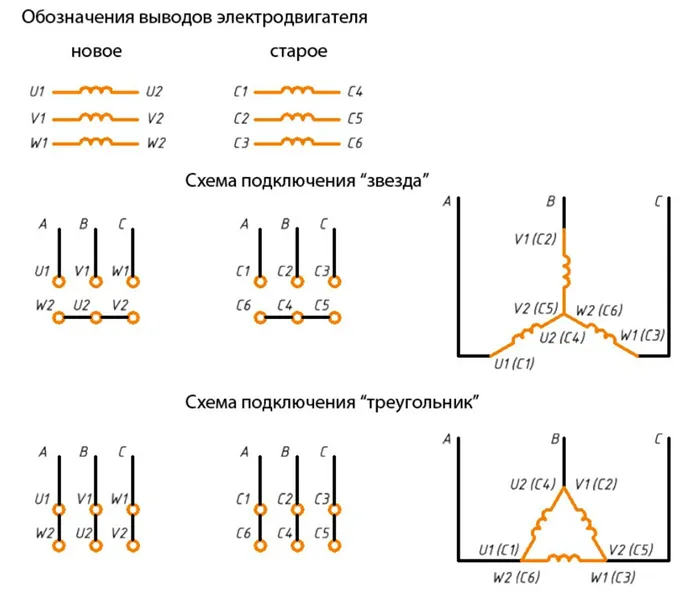
Конструкция статора этих электродвигателей идентична конструкции статора других типов электродвигателей переменного тока. Сердечники статора, рассчитанные на трехфазную работу, расположены по кругу под углом 120°. Они имеют изолированные обмотки из медного провода определенного сечения и соединяются треугольными или звездообразными соединениями. Структура катушки статора прочно прикреплена к стенке цилиндрического корпуса.
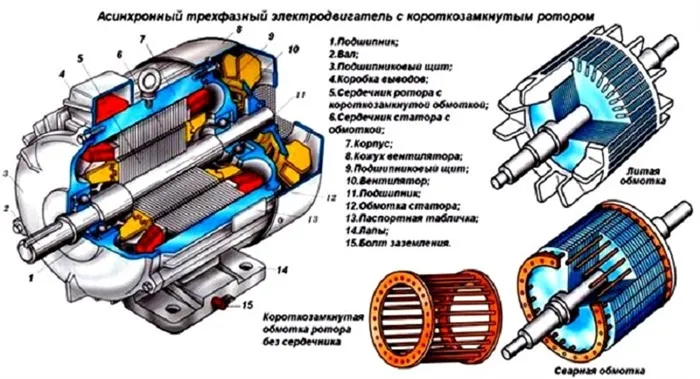
Структура электродвигателя видна из рисунка 1. Обратите внимание на конструкцию обмотки без сердечника короткозамкнутого ротора.
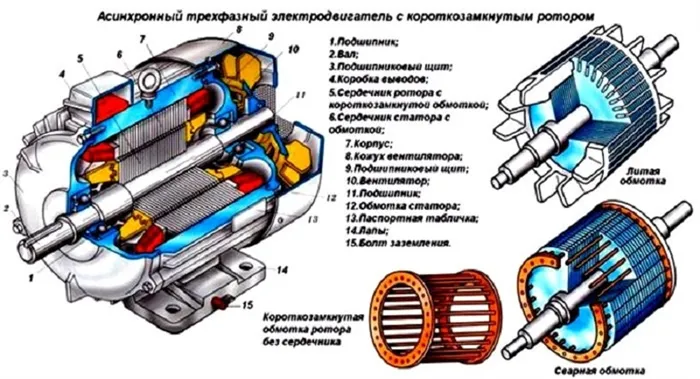
Рис. 1.Структура асинхронного двигателя при коротком замыкании
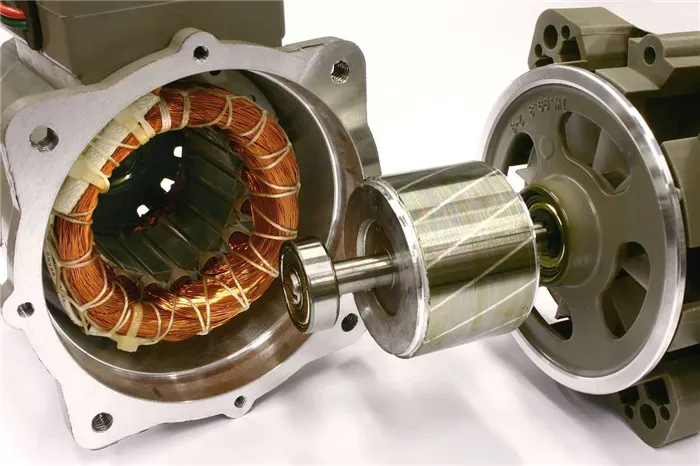
Конструкция ротора немного отличается. Конструкция обмотки очень похожа на конструкцию клетки. Он состоит из алюминиевых стержней, оканчивающихся коротким замыканием. В двигателях большой мощности в качестве короткозамкнутой обмотки ротора используются медные стержни. Этот металл имеет низкое удельное сопротивление, но стоит дороже алюминия. Кроме того, медь плавится быстрее. Это нежелательно, так как вихри могут сильно нагреть ядро.
Конструктивно сердечник помещен в сердечник ротора, изготовленный из трансформаторной стали. В конструкции ротора сердечник расположен на валу, а проводники обмотки запрессованы (отформованы) в пазы магнитопровода. При этом не требуется изоляция щелей сердечника. На рисунке 2 показана фотография бегунка с короткозамкнутой обмоткой.

Рис. 2. Курсор асинхронного двигателя с короткозамкнутой обмоткой
Пластины магнитопровода таких роторов не требуют поверхностной лаковой изоляции. Их конструкция очень проста и позволяет снизить стоимость асинхронных двигателей. Асинхронные двигатели составляют 90% от общего числа электродвигателей.
Курсор вращается в статоре асинхронно. Между этими частями определяется минимальное расстояние в виде воздушного зазора. Оптимальный зазор составляет от 0,5 мм до 2 мм.
В зависимости от количества используемых фаз, асинхронные двигатели можно разделить на три типа
Количество и расположение обмоток статора может быть различным. Модели с трехфазными обмотками имеют высокую стабильность при номинальной нагрузке. У них самая лучшая функция загрузки. Часто эти двигатели имеют простую схему запуска.
Двухфазные двигатели имеют две обмотки статора, расположенные перпендикулярно друг другу, каждая из которых питается переменным током. Они часто используются в однофазных сетях, где одна обмотка подключена непосредственно к одной фазе, а для подачи питания на вторую обмотку используется фазосдвигающий конденсатор. Без этого компонента вал асинхронного двигателя не начал бы вращаться сам по себе. Поскольку конденсатор является неотъемлемой частью двухфазного двигателя, эти двигатели также называют конденсаторными.
Принцип работы
Асинхронные двигатели основаны на трехфазном токе, который может создавать вращающееся магнитное поле в обмотках статора. В рассмотренных электродвигателях синхронная частота вращения электромагнитного поля прямо пропорциональна собственной частоте переменного тока.
Существует обратно пропорциональная зависимость между числом оборотов и числом пар полюсов в обмотках статора. Поскольку сдвиг фаз составляет 60 градусов, зависимость скорости вращения ротора (оборотов в минуту) может быть выражена следующим уравнением
В результате магнитной индукции в сердечнике ротора возникает АДР, который вызывает протекание тока в замкнутом проводнике. Возникает сила в ампер, и замкнутый проводник начинает вращаться и следовать за магнитным полем. В номинальном режиме скорость вращения ротора немного меньше скорости магнитного поля, создаваемого статором. Когда частоты совпадают, магнитный поток прекращается, ток в обмотках ротора прекращается, и сила прекращается. Как только скорость вращения вала уменьшается, переменный ток в магнитном поле восстанавливает силу Ампера.
Разница между частотами вращения магнитного поля называется частотой скольжения: ns= n1-n2Относительное значение s, представляющее отставание, называется скольжением: n
s = 100%*(ns / n1) = 100%*(n1 -n2) / n1,. где ns частота скольжения — n1, где n2 — частоты вращения магнитных полей статора и ротора, соответственно.
Для уменьшения гармоник ЭМС и сглаживания импульсов короткозамкнутые стержни катушек слегка наклонены. Снова посмотрите на рис. 2 и обратите внимание на положение сердечника, выполняющего роль обмотки ротора, по отношению к вращающемуся валу.
Скольжение зависит от механической нагрузки на вал двигателя. В асинхронных двигателях скольжение составляет от 0 до 1. В режиме холостого хода ротор акселератора имеет очень малое активное сопротивление. S близка к нулю.
Увеличение нагрузки увеличивает скольжение и может привести к выходу из строя узла при остановке двигателя из-за перегрузки. Это состояние эквивалентно короткому замыканию и может привести к повреждению устройства.
Величина относительной задержки, соответствующая номинальной нагрузке электродвигателя, называется номинальным скольжением. Для двигателей малого и среднего размера этот процент составляет от 8% до 2%. Когда ротор двигателя неподвижен, скольжение стремится к нулю, но приближается к 100% в режиме холостого хода.
При запуске электродвигателя нагрузка на его обмотки приводит к быстрому увеличению пускового тока. При достижении номинальной мощности двигатель автоматически восстанавливает номинальную частоту ротора при короткозамкнутых витках обмотки.
Обратите внимание на кривую момента проскальзывания, показанную на рис. 3.

Рисунок 3.Кривая крутящего момента скольжения
Жидкостный резистор представляет собой емкость с электролитом, в который погружены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электрода 3.
Устройство асинхронного двигателя
Асинхронный означает не связанный и не одновременный. Как следствие, ротор такого двигателя вращается с частотой, меньшей, чем частота электромагнитного поля статора.
Эта задержка называется скольжением и обозначается символом S в формуле, используемой для расчета.
- S = (n1-n2)/ n1-100%, где n1 — синхронная частота поля статора, а n2 — частота вращения вала.
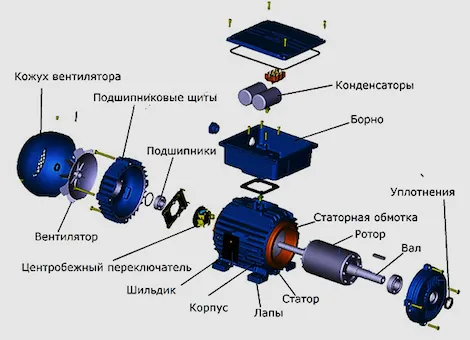
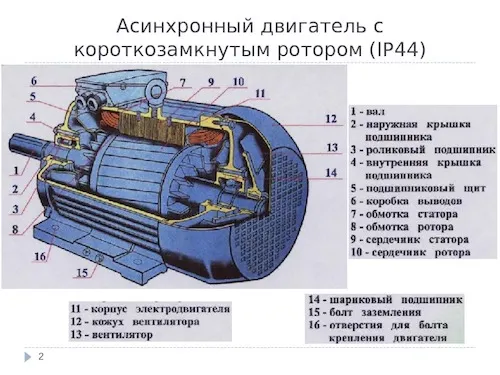
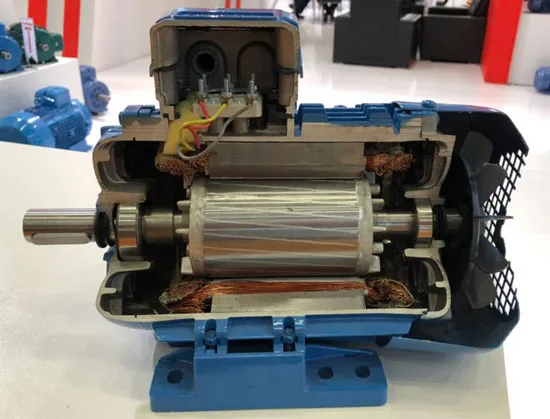
Конструктивно типичный асинхронный электродвигатель состоит из следующих компонентов и частей
- Статор с обмотками. Эту функцию также может выполнять рама, внутри которой находится статор с обмотками.
- Короткое замыкание ротора. Если используется фаза, она может называться якорем или коллектором.
- Различные типы подшипников — роликовые или подшипники качения. Двигатели мощностью в лошадиную силу имеют закрытую крышку подшипника спереди.
- Металлические или пластиковые вентиляторы охлаждения, помещенные в корпус с патрубками для подачи воздуха.
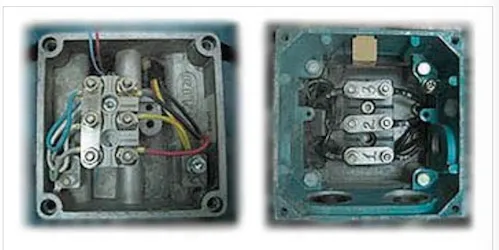
- Кабели подключаются через клеммную коробку.
Эти компоненты могут незначительно отличаться в зависимости от версии двигателя.
Как уже упоминалось, асинхронные двигатели могут быть как 3-фазными, так и однофазными. В первом варианте можно использовать бегунок с короткозамкнутой клеткой или бегунок с фазой. Трехфазные асинхронные двигатели с коротким замыканием являются наиболее распространенными и поэтому должны быть рассмотрены более подробно.
Статор имеет круглую форму и собран из специальных стальных пластин, которые изолированы друг от друга. Это конструктивно создает пазовый сердечник, в котором располагаются обмотки. Для этого используются медные обмотки, изолированные лаком. В тяжелых агрегатах обмотки выполнены в виде стержней. При размещении они смещены на 120°. Соединения выполняются в виде звезды или треугольника.
Сам закороченный ротор имеет форму вала с прикрепленным к нему набором стальных листов. Этот набор листов образует сердечник с канавками, заполненными расплавленным алюминием. Алюминий равномерно распределяется в щели, образуя стержень, концы которого замыкают алюминиевое кольцо.
Фазовый бегунок состоит из сердечника и вала с тремя обмотками. Один конец соединен со звездочкой, а другой — с контактным кольцом, приводимым в действие щеткой. Во время пуска асинхронный двигатель вырабатывает более высокие пусковые токи. Это можно уменьшить, добавив к фазным обмоткам реостат нагрузки.
Принцип работы
Конструкция и конструктивные особенности асинхронного двигателя также определяют принцип работы устройства. При подаче напряжения на обмотку статора в ней возникает магнитное поле. Приложение этого напряжения изменяет магнитный поток и общее магнитное поле статора. Меняющийся магнитный поток достигает ротора и активирует его, прежде чем он начнет вращаться. Чтобы статор и ротор работали асинхронно, напряжение и магнитный поток должны быть равны переменному току, используемому в качестве источника питания.
Сам двигатель функционирует следующим образом.
- Вращающееся магнитное поле действует на короткозамкнутую обмотку, специально приспособленную для вращения.
- Электрическое поле пересекает проводники обмотки проводника и вызывает на них электродвижущую силу.
- Под действием этой силы ток протекает по проводнику ротора и взаимодействует с вращающимся магнитным полем. В результате на обмотку ротора действует электромагнитная сила.
- В целом, действие приложенных сил создает вращающий момент, который заставляет ротор вращаться в направлении магнитного поля.
Величина индуцированного АДР зависит от частоты, с которой вращающееся магнитное поле пересекает проводник. Другими словами, чем больше разница между n1 и n2, тем больше размер ADR. Ротор вращается с частотой n2, которая всегда ниже частоты синхронизации поля статора n1. Эта разница между двумя частотами приводит к частоте скольжения ∆n =n1-n2. Это неравенство является необходимым условием для возникновения электромагнитного момента в асинхронном двигателе. Устройство названо так потому, что вращение ротора не синхронизировано с полем статора.
Что такое скольжение
Понятие скольжения — это отношение частоты вращения к частоте поля. Это значение S берется в процентах от частоты вращения магнитного поля. Согласно уравнению, описанному ранее, скорость вращения ротора, определенная с помощью скольжения, равна: n2 = n1 x(1-S).
Крыльчатка асинхронного двигателя вращается в том же направлении, что и его магнитное поле. Направление вращения поля зависит от последовательности фаз трехфазной сети. Направление вращения ротора может быть изменено путем изменения направления вращения поля, создаваемого статором. В этом случае изменяется последовательность импульсов тока в отдельных обмотках. При необходимости можно регулировать вращение по часовой стрелке или против часовой стрелки.
Важным моментом является запуск асинхронных двигателей, когда обмотки ротора пересекают вращающееся магнитное поле. Это приводит к высоким электромагнитным напряжениям и высоким пусковым токам. Эта ситуация компенсируется специальными нагрузками, которые снижают скорость вращения ротора.
Асинхронные двигатели с высоким моментом холостого хода требуют более высокого пускового момента при ограничении пускового тока. Для этой цели используются двигатели с фазными роторами. Цепь ротора содержит трехфазный реостат, который увеличивает начальный пусковой момент.
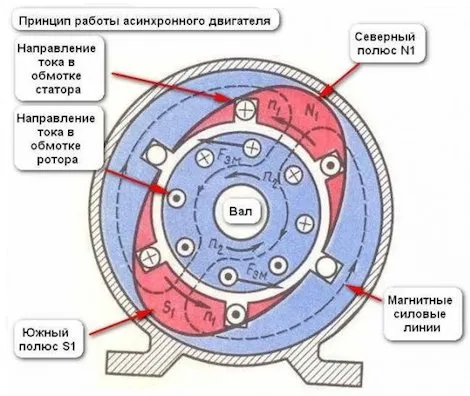
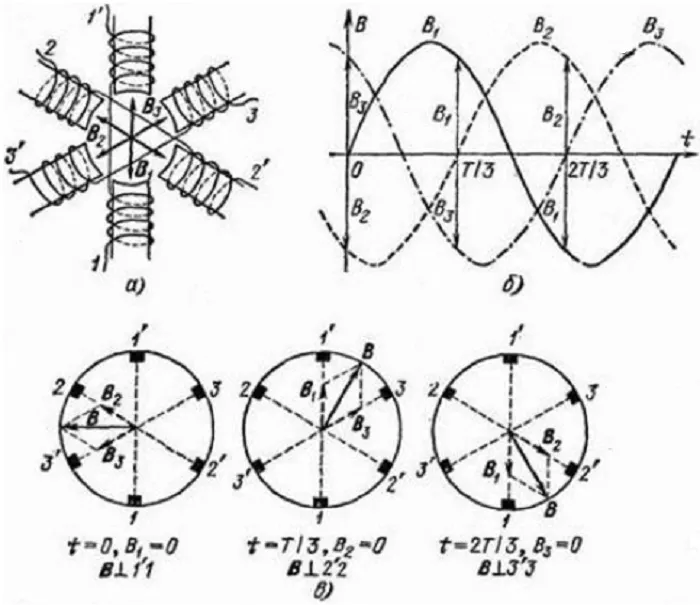
Получение вращающегося магнитного поля
Используя трехфазные токи, то есть три тока, смещенные на одну треть своего периода, можно легко добиться вращающегося магнитного поля без механического вращения магнита или использования дополнительных устройств.
Вращающееся магнитное поле создается системой трехфазного тока, питающей обмотки статора. Обмотки статора могут быть соединены между собой звездой или треугольником. Когда металлическое кольцо (или, лучше сказать, катушка) помещается в это вращающееся магнитное поле, в нем индуцируются токи, как если бы кольцо (катушка) вращалось в постоянном магнитном поле.
Взаимодействие между магнитным полем и этими токами создает силу, которая заставляет кольцо (катушку) вращаться. Это основная идея трехфазного двигателя с вращающимся магнитным полем, впервые реализованная М.О.ОО. Доливо-Добровольский.
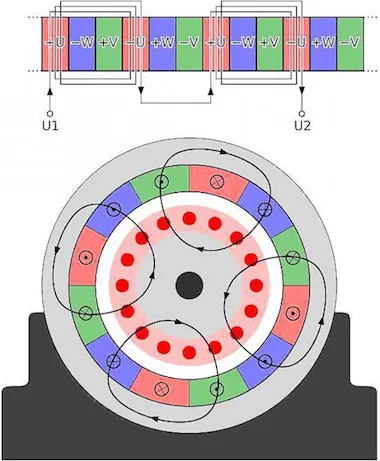
Обмотки статора асинхронного двигателя в виде трех катушек помещены в пазы, расположенные под углом 120°. Начальные и конечные точки катушек обозначены буквами A, B, C, X, Y и Z соответственно. Когда на катушку подается трехфазное напряжение, в ней возникают токи Ia, Ib и Ic, и катушка генерирует собственное переменное магнитное поле.
Ток в катушке положителен, когда он течет от начала к концу катушки, и отрицателен в противоположном направлении. Вектор магнитных сил совпадает с осью катушки, а направление результирующего вектора совпадает с осью катушки, хотя их величина определяется величиной тока.
Полученные векторы магнитных сил повернуты на 120°, и их размер совпадает с осью соответствующей катушки. Таким образом, в течение определенного периода времени результирующее магнитное поле статора вращается с постоянной скоростью. Работа трехфазных асинхронных двигателей основана на взаимодействии между вращающимся магнитным полем и током, индуцированным в проводниках.
Принцип работы
Принцип работы двухфазных и полифазных двигателей был разработан и запатентован Николой Тесла. Доливо-Добровольский усовершенствовал конструкцию электродвигателей и предложил использовать три фазы вместо двух, применяемых Н. Тесла.
Это улучшение основано на том, что сумма двух синусоидальных волн одинаковой частоты с разными фазами дает синусоидальную волну. Это позволяет использовать три провода (с четвертым «нулевым» кабелем, нулевым током) в одной трехфазной системе, в отличие от четырех кабелей, необходимых в системе с двухфазным током.
Сумма моментов, создаваемых отдельными кабелями, образует результирующий момент двигателя — пару электромагнитных сил, которые стремятся вращать ротор в направлении движения электромагнитного поля статора.
Ротор вращается с определенной скоростью, а магнитное поле и ротор вращаются с разными скоростями или асинхронно. В асинхронном двигателе скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Вращающий момент двигателя создается силой взаимодействия между магнитным полем и токами, создаваемыми им в роторе, причем сила этих токов определяется относительной скоростью вращения магнитного поля относительно ротора, вращающегося в в том же направлении, что и поле.
Таким образом, если ротор вращается с той же частотой, что и поле, то относительного движения между ними нет. В этом случае ротор оседает относительно поля, и электростатическое напряжение не индуцируется. Это означает, что через ротор не протекает ток и не может быть создана сила, способная вращать ротор. Поэтому двигатели описываемого типа могут работать только при скоростях возбуждения, т.е. скоростях ротора, которые немного отличаются от скорости тока.
По этой причине такие двигатели называют «асинхронными» («модерн» в переводе с греческого — совпадение или согласование времени, частица «а» означает отрицание). Если машине с двигателем требуется скорость, отличная от скорости самого двигателя, предпочтительнее использовать шестерни или ремни в разных пропорциях.
Само собой разумеется, что по мере увеличения нагрузки на двигатель необходимо увеличивать не только ток, но и ток статора, чтобы двигатель мог поглощать достаточную мощность из сети. По этой причине при эксплуатации двигателя необходимо строго соблюдать следующие правила
- Размеры двигателя всегда должны соответствовать той мощности, которая действительно необходима двигателю.
- Если нагрузка на двигатель составляет менее 40% от нормальной нагрузки, а старая обмотка установлена в треугольнике, рекомендуется перейти на соединение звездой.
- Чтобы изменить направление вращения вала двигателя, необходимо поменять местами два линейных кабеля, подключенных к двигателю. Это можно легко сделать с помощью биполярного переключателя.
Это делается автоматически. Это происходит потому, что ток в курсоре генерирует собственное магнитное поле в окружающем пространстве, воздействуя на старую обертку и вызывая электрические тенденции. Связь между курсором и магнитным током статора, или реакция усиления, как говорят, управляет колебаниями тока статора и гарантирует, что мощность, получаемая из сети, соответствует механической мощности, выдаваемой двигателем.
Изменение частоты вращения ротора
Параллельные двухфазные обмотки образуют пары полюсов 120°. Обмотки соединены в ряд, образуя две пары полюсов, что позволяет снизить скорость вращения в два раза. Скорость вращения ротора регулируется путем изменения частоты тока с помощью отдельных источников тока или тиристорных преобразователей частоты.
Поскольку при запуске двигатель развивает очень значительный крутящий момент, а время его бездействия относительно невелико, скорость курсора быстро возрастает и почти равна скорости поля, поэтому относительная частота почти равна нулю, а ток курсора быстро уменьшается.
Для двигателей малой и средней мощности кратковременная перегрузка при запуске не опасна, но для очень мощных двигателей (десятки киловатт) используются специальные буттеры, которые гасят ток обмотки по мере достижения нормальной скорости. Эти люйметры постепенно и постепенно выводятся из строя.
При увеличении нагрузки на двигатель скорость курсора немного уменьшается, скорость курсорного поля увеличивается, одновременно увеличивается ток в бегунке и крутящий момент, создаваемый двигателем.
Однако для изменения мощности двигателя от нуля до нормы требуется очень небольшое изменение скорости курсора, максимум до 6% от максимального значения. Таким образом, асинхронные трехфазные двигатели поддерживают почти постоянную скорость вращения ротора при очень больших изменениях нагрузки.
В принципе, можно регулировать эту скорость, но соответствующие устройства сложны и нерентабельны и поэтому редко используются на практике. В тех случаях, когда для двигателей, приводимых в движение двигателем, требуется скорость, отличная от той, которую может выдать двигатель, предпочтительнее использовать зубчатые передачи или ремни с различными отношениями.







