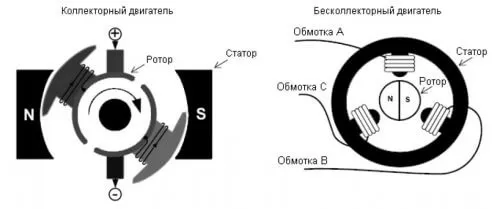
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе. Поэтому, далее в тексте ротор — магниты, статор — обмотки.
Что такое бесколлекторный двигатель постоянного тока, как он устроен и работает
Главная проблема коллекторных двигателей – это как раз-таки наличие коллекторного узла. Щётки стираются, а ламели изнашиваются, от слоя графитовой пыли между ними происходят замыкания, возникает искрение. Этих проблем нет в асинхронных машинах, но работать от постоянного тока они не могут. Бесколлекторный двигатель постоянного тока лишен обозначенных выше недостатков. О том, что это такое, как работает и где используются двигатели БДПТ мы и поговорим в этой статье.
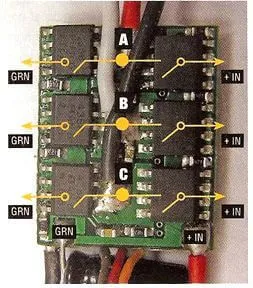
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС. В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
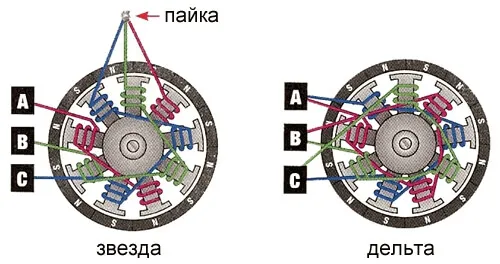
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
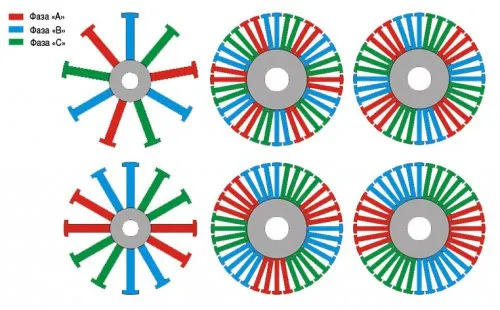
Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
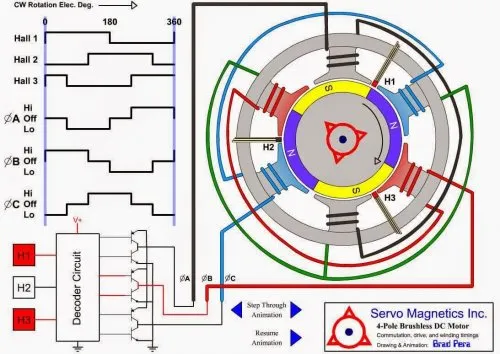
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд.
Немного терминологии
Бесколлекторные двигатели постоянного тока называют так же вентильными, в зарубежной литературе BLDCM (BrushLes Direct Current Motor) или PMSM (Permanent Magnet Synchronous Motor).
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе. Поэтому, далее в тексте ротор — магниты, статор — обмотки.
Для управления двигателем применяется электронный регулятор. В зарубежной литературе Speed Controller или ESC (Electronic speed control).
Что такое бесколлекторный двигатель?
Обычно люди, сталкиваясь с чем-то новым, ищут аналогии. Иногда приходится слышать фразы «ну это как синхронник», или еще хуже «он похож на шаговик». Поскольку большинство бесколлекторных двигателей трехфазные, это еще больше путает, что приводит к неправильному мнению о том, что регулятор «кормит» двигатель переменным 3-x фазным током. Все вышесказанное соответствует действительности только отчасти. Дело в том, что синхронными можно назвать все двигатели кроме асинхронных. Все двигатели постоянного тока являются синхронными с самосинхронизацией, но их принцип действия отличается от синхронных двигателей переменного тока, у которых самосинхронизация отсутствует. Как шаговый бесколлекторный двигатель тоже, наверное, сможет работать. Но тут такое дело: кирпич он тоже может летать. правда, недалеко, ибо для этого не предназначен. В качестве шагового двигателя больше подойдет вентильный реактивный двигатель.
Попробуем разобраться, что собой представляет бесколлекторный двигатель постоянного тока (Brushles Direct Current Motor). В самой этой фразе уже кроется ответ — это двигатель постоянного тока без коллектора. Функции коллектора выполняет электроника.
Преимущества и недостатки
Из конструкции двигателя удаляется довольно сложный, требующий обслуживания тяжелый и искрящий узел — коллектор. Конструкция двигателя существенно упрощается. Двигатель получается легче и компактнее. Значительно уменьшаются потери на коммутацию, поскольку контакты коллектора и щетки заменяются электронными ключами. В итоге получаем электродвигатель с наилучшими показателями КПД и показателем мощности на килограмм собственного веса, с наиболее широким диапазоном изменения скорости вращения. На практике бесколлекторные двигатели греются меньше, чем их коллекторные братья. Переносят большую нагрузку по моменту. Применение мощных неодимовых магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция бесколлекторного двигателя позволяет эксплуатировать его в воде и агресивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех.
Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники — просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Отличия от других типов двигателей
Отличия от коллекторных ДПТ. Размещение обмотки на роторе позволило отказаться от щёток и коллектора и избавиться тем самым от подвижного электрического контакта, который значительно снижает надёжность ДПТ с постоянными магнитами. По этой же причине скорость у бесколлекторных двигателей, как правило, значительно выше, чем у ДПТ с постоянными магнитами. С одной стороны это позволяет увеличить удельную мощность бесколлекторного двигателя, с другой стороны не для всех применений такая высокая скорость является действительно необходимой
Отличия от синхронных двигателей с постоянными магнитами. Синхронные двигатели с постоянными магнитами на роторе очень похожи на бесколлекторные ДПТ по конструкции, однако есть и ряд различий. Во-первых термин синхронный двигатель объединяет в себе много различных видов двигателей, часть из которых предназначены для непосредственной работы от стандартной сети переменного тока, другая часть (например синхронные серводвигатели) может работать только от преобразователей частоты (контроллеров двигателей). Бесколлекторные двигатели, хотя и имеют на статоре трёхфазную обмотку, не допускают непосредственную работу от сетевого напряжения, и обязательно требуют наличия соответствующего контроллера. Кроме того синхронные двигатели предполагают питание напряжением синусоидальной формы в то время как бесколлекторные двигатели допускают питание переменным напряжением ступенчатой формы (блочная коммутация) и даже предполагают его использование в номинальных режимах работы.
Когда нужен бесколлекторный двигатель?
Ответ на этот вопрос достаточно прост – в тех случаях, когда он имеет преимущество перед остальными типами двигателей. Так, например, практически невозможно обойтись без бесколлекторного двигателя в применениях, где требуются большие скорости вращения: свыше 10000 об/мин. Оправдано применение бесколлекторных двигателей также и в тех случаях, когда требуется высокий срок службы двигателя. В тех случаях, когда требуется применять сборку из двигателя с редуктором, однозначно оправдано применение низкоскоростных бесколлекторных двигателей (с большим числом полюсов). Высокоскоростные бесколлекторные двигатели в этом случае будут иметь скорость выше, чем предельно допустимая скорость редуктора, и по этой причине не будет возможности использовать их мощность полностью. Для применений, где требуется максимально простое управление двигателем (без использования контроллера двигателя) естественным выбором будет коллекторный ДПТ.
С другой стороны, в условиях повышенной температуры или повышенной радиации проявляется слабое место бесколлекторных двигателей – датчики Холла. Стандартные модели датчиков Холла имеют ограниченную стойкость к радиации и диапазон рабочих температур. Если в подобном применении всё же имеется необходимость использовать бесколлекторный двигатель, то неизбежными становятся заказные исполнения с заменой датчиков Холла на более стойкие к указанным факторам, что увеличивает цену двигателя и сроки поставки.
Двухфазные двигатели обычно используются в некритических низкоуровневых устройствах, таких как большие вентиляторы, поэтому там не требуются сложные контроллеры. В результате двухфазные двигатели мощнее и дешевле. Драйверы, такие как например LB1668M, могут использоваться для их управления.
Где применяются бесколлекторные двигатели
К настоящему времени бесколлекторные двигатели получили широкое распространение, как благодаря своей высокой надёжности, высокой удельной мощности и возможности работать на высокой скорости, так и из-за быстрого развития полупроводниковой техники, сделавшей доступными мощные и компактные контроллеры для управления этими двигателями.
Бесколлекторные двигатели широко применяются в тех системах где их характеристики дают им преимущество перед двигателями других типов. Например, там, где требуется скорость вращения несколько десятков тысяч оборотов в минуту. Если от изделия требуется большой срок службы, а ремонт невозможен или ограничен из-за особенностей эксплуатации изделия, то и тогда бесколлекторный двигатель будет хорошим выбором.
В идеальном случае для них нужны разные источники питания (контроллеры), но на практике они взаимозаменяемы. Но если использовать контроллер с прямоугольными или трапецеидальным выходным напряжением с PMSM-двигателем, то будут слышны характерные звуки, похожие на стук во время вращения.
Результаты тестирования
Для проверки работоспособности стенда мы сначала испытали его на обычном коллекторном моторе R540-6022. Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским.
Затем уже был испытан наш мотор. Естественно он смог показать лучшее КПД(65% против 45%) и при этом больший момент(1200 против 250 г на см), чем обычный мотор. Измерение температуры тоже дало достаточно хорошие результаты, во время тестирования мотор не нагревался выше 80 градусов.
Но на данный момент измерения пока не окончательны. Нам не удалось измерить мотор в полном диапазоне оборотов из-за ограничения мощности источника питания. Также предстоит сравнить наш мотор с аналогичными моторами конкурентов и испытать его “в бою”, поставив на гоночную радиоуправляемую машину и выступить на соревнованиях.







