
Ознакомившись с современными двигателями, их устройством, принципом работы и условиями эксплуатации, в которых они используются, вы сможете быстро и легко выбрать тип двигателя (защищенный, закрытый или открытый), который лучше всего подходит для вашего приложение и использовать его везде, где это возможно.
Что такое синхронный двигатель и где он используется
Современные двигатели (SP) не так распространены, как асинхронные короткозамкнутые двигатели. Однако они используются там, где требуется высокий крутящий момент, а во время работы возникают частые перегрузки. Этот тип двигателя также используется, когда требуется большая мощность для привода машины, так как он имеет более высокий коэффициент мощности и может улучшить главный коэффициент мощности. Это значительно снижает затраты на электроэнергию и нагрузку на линию. Что такое современный двигатель, где он используется и каковы его преимущества и недостатки, будет рассмотрено в этой статье.
Проще говоря, современные двигатели — это электродвигатели, в которых скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Рассмотрим вкратце принцип работы такого электродвигателя. Он основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора, обычно создаваемого трехфазным переменным током.
Постоянное магнитное поле ротора создается обмоткой возбуждения или постоянным магнитом. Ток в обмотке статора создает вращающееся магнитное поле, в то время как ротор является действующим постоянным магнитом, и его полюса направлены в сторону противоположных полюсов поля статора. Это заставляет ротор вращаться синхронно с полем статора. Это главная особенность.
Напомним, что в асинхронных двигателях скорость вращения МП статора и ротора зависит от величины скольжения, а их механические характеристики являются «горбами» с пиком при критическом скольжении (ниже номинального). (скорость вращения).
Скорость, с которой вращается поле статора, может быть рассчитана по следующему уравнению
f — частота тока в обмотке, Гц, а p — число пар полюсов.
Поэтому скорость вращения оси современных двигателей определяется по той же формуле.
Большинство двигателей переменного тока, используемых в промышленности, производятся с обмотками возбуждения без постоянных магнитов, тогда как современные маломощные двигатели переменного тока производятся с постоянными магнитами в роторе.
Обмотка возбуждения приводится в движение кольцом и щеточным узлом. В отличие от коллекторных двигателей, в которых для передачи энергии на вращающуюся катушку используется коллектор (набор продольно расположенных пластин), в современных двигателях используется кольцо на одном конце статора.
Источником возбуждения постоянного тока является тиристорный привод, часто называемый «ВТЭ» (по названию одной из серий таких самодельных устройств). Ранее использовались системы возбуждения «генератор-двигатель», когда генератор (возбудитель) устанавливался на вал с двигателем и подавал ток на обмотку возбуждения через резистор.
Почти все роторы в современных двигателях постоянного тока выполнены без обмоток возбуждения, но с постоянными магнитами, которые по принципу работы похожи на двигатели переменного тока, но значительно отличаются от обычных трехфазных двигателей в плане подключения и управления.
Одной из основных характеристик электродвигателей является кривая их механической характеристики. Для современных двигателей это близко к прямой горизонтальной линии. Это означает, что нагрузка на ось не влияет на скорость (если не достигнуто критическое значение).
Конструкция ротора
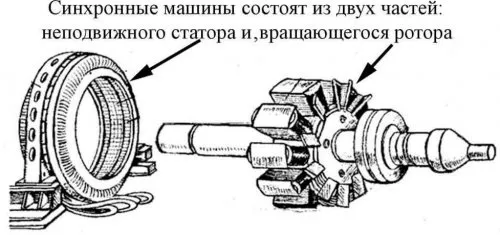
Как и все остальное, современные электродвигатели состоят из двух основных частей
- Статор. Здесь находятся обмотки. Его также называют вооружением.
- Ротор. Он оснащен постоянными магнитами или обмотками возбуждения. Также называется индуктором, так как предназначен для создания магнитного поля).
На роторе установлены два кольца для подачи питания на обмотку возбуждения (поскольку возбуждение осуществляется постоянным током, на одно подается «+», а на другое — «-«). Щетки устанавливаются в щеткодержатели.
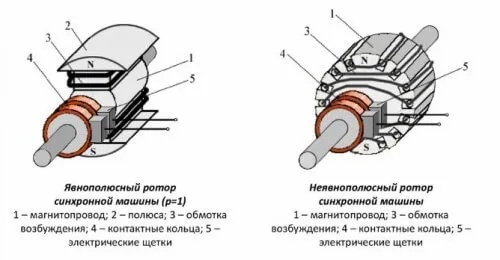
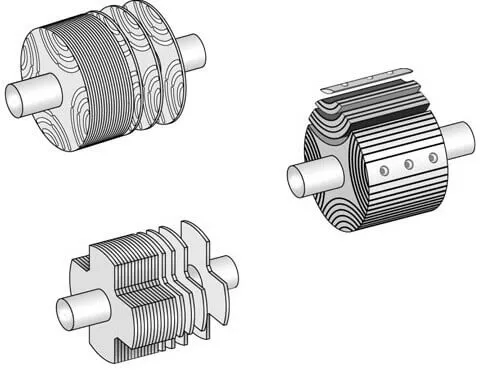
Современные двигатели переменного тока имеют два типа бегунков, в зависимости от применения.
- Явно установлен на столбе. Столб хорошо виден. Используется при низкой скорости и большом количестве столбов.
- Не положительные — они выглядят как круглые стержни с обмотками в гнезде. Они используются при высоких скоростях вращения (3000, 1500 об/мин) и с небольшим количеством полюсов.
Пуск синхронного двигателя
Особенностью этого типа электродвигателя является то, что его нельзя запустить, просто включив в розетку. Помимо источника тока возбуждения, машина имеет довольно сложную пусковую цепь.
Он запускается как асинхронный двигатель, и в дополнение к обмотке возбуждения на роторе располагается дополнительная обмотка червячной клетки для создания пускового момента. Эту обмотку также называют «демпфирующей», поскольку она повышает устойчивость при внезапных перегрузках.
При запуске ток возбуждения в обмотке ротора отсутствует, а при разгоне до субсинхронной скорости (на 3-5% ниже синхронной) подается ток возбуждения, после чего токи ротора и статора колеблются. Затем двигатель входит в синхронизацию и работает.
Для ограничения пускового тока мощных двигателей напряжение обмотки статора может быть уменьшено путем подключения однообмоточного трансформатора или последовательного резистора.
Современные машины работают в асинхронном режиме, но к обмотке возбуждения подключается резистор с сопротивлением в 5-10 раз больше самой обмотки. Это делается для того, чтобы избежать замедления пульсирующего потока, вызванного током, индуцированным в обмотке во время запуска, и избежать повреждения обмотки из-за индуцированного ADR.
Существует множество типов этих машин, и, как уже упоминалось выше, наиболее распространенными в промышленности являются современные конструкции двигателей переменного тока с обмотками возбуждения. Другие типы включают
- Современные двигатели с постоянными магнитами. Это различные двигатели, такие как PMSM (современные двигатели с постоянными магнитами, BLDC) и бесщеточные двигатели постоянного тока. Они отличаются режимом управления и формой тока (синусоидальный или трапецеидальный). Также называются инверторами или бесщеточными двигателями. Они используются в станках, моделях с дистанционным управлением и электроинструментах. Они питаются не напрямую от постоянного тока, а от специальных инверторов.
- Шаговые двигатели — это современные бесщеточные двигатели, используемые для обеспечения точного положения ротора, для крепления инструментов на станках с ЧПУ и для управления различными компонентами автоматизированных систем (например, дроссельными заслонками автомобилей). Они состоят из статора, в котором расположена обмотка возбуждения, и ротора из магнитно-мягкого или магнитно-жесткого материала. Конструктивно они очень похожи на более ранние типы.
- Реактивность.
- Лаг.
- Задержка реакции.
Последние три типа также являются бесщеточными и работают благодаря специальной конструкции ротора. Существует три типа реактивных двигателей: бегуны с поперечным расщеплением, явно поляризованные бегуны и бегуны с осевым расщеплением. Объяснения принципов их работы сложны, занимают много места и поэтому будут пропущены. Редко можно встретить такие двигатели. В основном это маломощные машины, используемые в автоматизации.
Важным следствием этого является то, что когда CVT работают с переменной нагрузкой на валу, необходимо управлять током возбуждения, чтобы максимально использовать их компенсирующие характеристики.
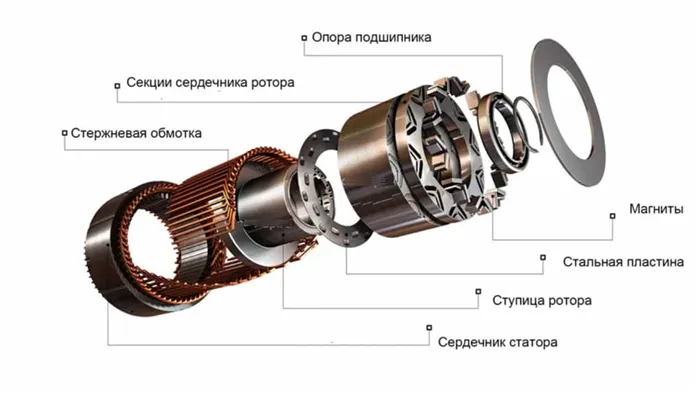
Конструктивные элементы
Современные конструкции двигателей основаны на характеристиках трехфазных токов, используемых для создания вращающегося магнитного поля. Поэтому они должны включать в себя следующие основные части
- Асинхронное колесо (или индукция, статор) — неподвижный узел двигателя, и
- Ротор (или якорь) — это приводной механизм.
Каждый элемент состоит из ряда более мелких элементов, которые тесно взаимодействуют друг с другом. Катушка по конструкции аналогична асинхронному диску и включает в себя
- Жилье
- Опора для поддержки арматуры
- Кронштейны, фиксирующие подшипники и завершающие корпус, и
- Вентилятор для охлаждения электродвигателя
- кожух для защиты двигателя от вращающегося вентилятора.
Кроме того, на боковой стороне корпуса статора находится коробка для электрических соединений. В корпусе находится прессованный металлический сердечник. Термин «сформированный» относится к набору тонких (толщиной 0,3-0,5 мм) стальных полос, изолированных друг от друга. Внешние полосы имеют перфорированные канавки для намотки фаз.
Индукционные колеса выпускаются различных размеров и конструкций, как в виде цельных цилиндров, так и собранные из отдельных компонентов. Конструкция корпуса зависит от мощности и размера электродвигателя. Для небольших машин конструкция изготавливается из одной детали, а статор запрессовывается на место, в то время как для больших машин конструкция изготавливается заранее. Это облегчает транспортировку, установку и эксплуатацию электродвигателя.
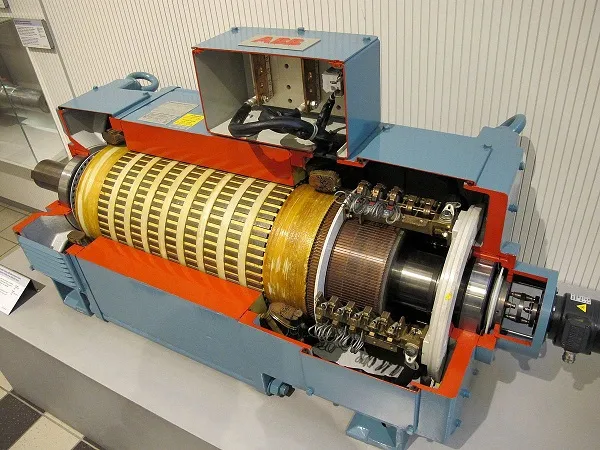
Роторный механизм предназначен для возбуждения современных двигателей (ММ) и поэтому содержит сердечник с постоянными магнитами (для двигателей малой мощности) или электромагнитами. Как и в случае с катушками, ротор является сборным или цельным. В двигателях, рассчитанных на высокие скорости (3000 и 1500 об/мин), обмотки ротора равномерно распределены по поверхности цилиндрического якоря. Этот тип привода называется бесшумным полярным двигателем. Низкоскоростные двигатели (до 1000 об/мин) имеют полюса с катушками возбуждения в роторе и поэтому называются двигателями с явными полюсами.
В современных двигателях с неявным полюсом оружие представляет собой стальной цилиндр, по длине которого проделан паз для размещения курсорной цепи. В зависимости от конструкции он может быть кованым и соединяться непосредственно с валом. В качестве альтернативы это может быть отдельный продукт, напрессованный на вал. Современные системы стимуляции движения защищены стальным немагнитным кольцом для защиты от центробежных сил.
Бегуны с видимыми полюсами характеризуются иным расположением арматурных контуров. В этом случае арматура крепится к валу машины с помощью магнитной цепи. Магнитопроводы переносят полюса за полюсами туда, где находится электрическая обмотка ротора. Современные системы электростимуляции электродвигателей также включают в себя соединительные элементы в виде колец, прикрепленных к валу и прижатых к ним устойчивых электрических щеток.
При вращении кольцо скользит по щеткам, обеспечивая электрический контакт скольжения. Асинхронные электродвигатели имеют аналогичный щеточный комплекс. Единственное отличие заключается в количестве раздвижных колец и щеток. Асинхронные машины нуждаются в трех контактных кольцах для обмотки фашин, в то время как современные машины нуждаются только в двух.
Рабочий процесс
Современные двигатели — это электрические устройства, работающие по законам электромагнитной индукции. Принципы работы и конструкция современных двигателей основаны на практическом применении этого природного явления. Магнитное поле создается трехфазной обмоткой, прикрепленной к прорези в пакете статора, аналогично схеме асинхронной машины. Бегунок опирается на притирочное поле непрерывного питания. Он активируется с помощью щеток и колец. Постоянный ток в обмотке стимула взаимодействует с вращающимся полем катушки, вызывая круговое движение вала. Крутящий момент зависит от текущей нагрузки и не зависит от скорости. Поэтому такой тип механизма называют современным двигателем. Это означает, что скорость армирования равна скорости индукционного поля.
Как только он запускается, новейший двигатель переменного тока вращается одновременно с магнитным током. Двигатели переменного тока могут запускаться только от сети. Это связано с бездействием бегункового блока и высокой скоростью вращающегося поля. В пусковых схемах маломощных машин используется башмак (амортизатор), который действует как современный двигатель с коротким циркулирующим сепаратором (т.е. асинхронный пуск). Для приводных агрегатов большой мощности — запуск вспомогательного двигателя или преобразователя частоты.
Наиболее часто используемым асинхронным пуском является пуск с дополнительной обмоткой при коротком замыкании. В этом случае современные двигатели с короткими циркуляционными сепараторами работают так же, как и асинхронные двигатели. Это заставляет механизм ротора ускоряться со скоростью вращающегося магнитного тока. По мере зарядки современного двигателя расстояние между полюсами арматуры и полем увеличивается. В результате механизм усиления отстает при угле нагрузки, соответствующем положению холостого хода.
Конструкция и принцип работы современных двигателей заключается в работе привода с постоянной скоростью, не зависящей от нагрузки. Современные двигатели не рассчитаны на нагрузку, превышающую начальную мощность между курсором и магнитным потоком. В противном случае синхронизация прерывается и работа современного двигателя прерывается.
Механическая и угловая характеристика
Благодаря характеристикам, присущим современным двигателям, значения их крутящего момента не зависят от скорости вращения. Эта характеристика привода определяет его назначение и применение. Техническое качество силовой установки, представляющей собой электрический движитель, оценивается соотношением между скоростью вращения двигателя и электромагнитным моментом, создаваемым двигателем. Это соотношение известно как механическая характеристика современных двигателей. Он может быть статическим или динамическим. Первый показывает работу современных двигателей в установившемся режиме. Вторая — это характеристика работы в переходный период.
Качество механических свойств оценивается по жесткости. Для этого параметра все признаки полностью делятся на жесткие, нежесткие и мягкие. Поскольку скорость вращения ротора современных двигателей под нагрузкой не меняется, этот тип электродвигателя имеет идеальные характеристики жесткости, которые выражаются следующим уравнением
где f1 — частота тока статора.
p — количество пар полюсов в обмотке статора.
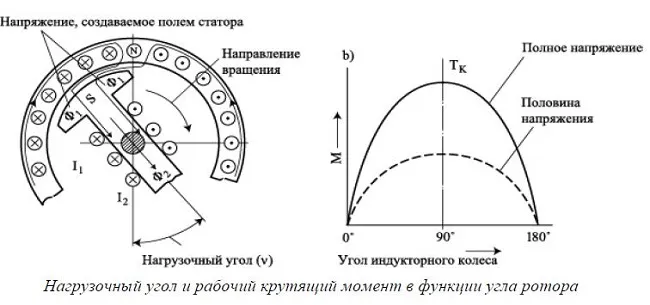
Однако зависимость n = f(M) не отражает полной работы двигателя, где оси индуктора и поля якоря смещаются при увеличении нагрузки. Каждая нагрузка соответствует определенному углу между этими осями. Уравнение углового отклика:.
Это уравнение представляет собой приблизительную зависимость между крутящим моментом на валу и углом отклонения ротора. В реальных условиях максимальный крутящий момент соответствует начальному углу чуть меньше 90°. В этом случае перегрузочная способность машины составляет: λm = M max / MN = 2-3
Ассортимент современных электродвигателей охватывает производство электроэнергии на электростанциях. Генераторы делятся на турбогенераторы, дизель-генераторы и гидрогенераторы в зависимости от их движения.
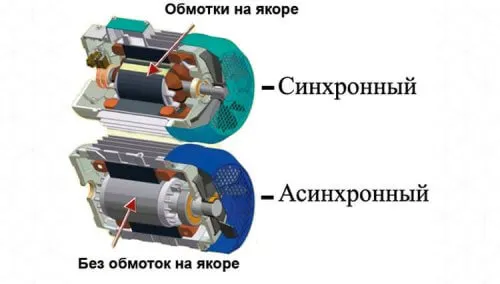
Отличие от асинхронного двигателя
Основное различие между синхронными и асинхронными двигателями заключается в принципе преобразования электрической энергии в механическое вращение. В современных двигателях процесс вращения ротора идентичен процессу вращения электромагнитного рабочего поля, создаваемого трехфазной сетью. В асинхронных двигателях, с другой стороны, АДР индуцируется в роторе только рабочим полем, и ротор вызывает свой собственный индуцированный поток для перемещения вала. В результате получается асинхронная машина с разными вращающимися магнитными полями и нагрузками на валу. Это выражается в физической величине скольжения.
Классические модели асинхронных короткозамкнутых асинхронных двигателей
- Они не выдерживают перегрузок.
- трудно запустить их со значительной силой, и
- Могут изменять свою скорость в зависимости от нагрузки на движущуюся машину.
Эти недостатки в некоторой степени преодолеваются асинхронными двигателями с фазно обмотанными роторами, но только современные двигатели могут полностью устранить эти недостатки.
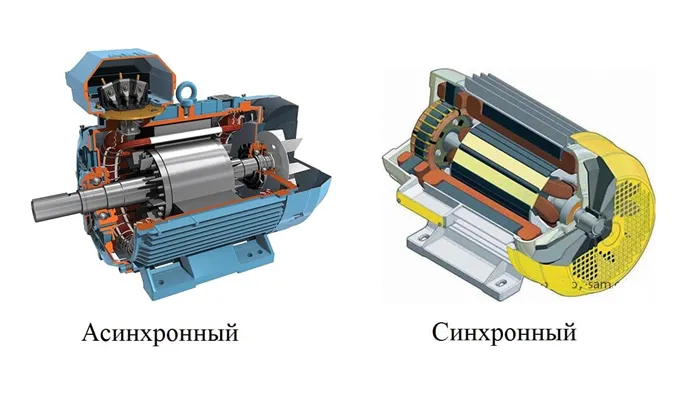
Рисунок 5.Различия между асинхронными двигателями и современными двигателями
Разновидности
Современные двигатели находят широкое применение в современной промышленности и бытовой технике. В результате их структурные особенности значительно отличаются. На практике существует несколько критериев, используемых для классификации различных типов современных машин. Согласно ГОСТ 16264.2-85, они могут быть разделены по следующим техническим характеристикам
В зависимости от способа получения поля ротора можно выделить следующие типы современных двигателей
- Если ротор имеет обмотку возбуждения, то синхронная мощность вырабатывается за счет питания от инвертора.
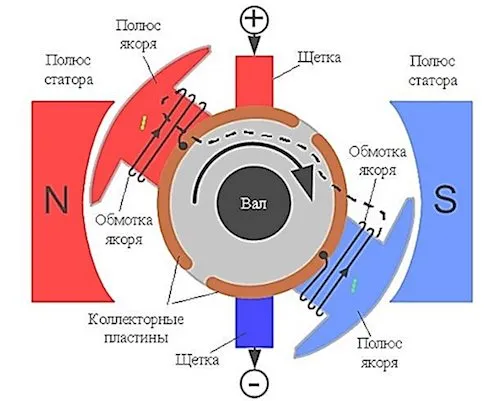
- В случае магнитного ротора на вал устанавливается постоянный магнит. Он выполняет ту же функцию, что и обмотка возбуждения, но не требует источника питания (см. рис. 6).
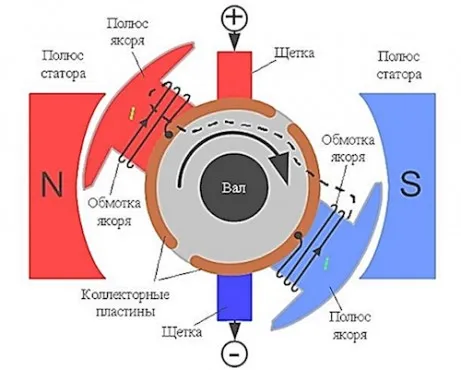
В реактивном роторе конструкция спроектирована таким образом, что линии магнитного поля преломляются сердечником, вызывая движение всей конструкции (см. рис. 7). Из-за влияния динамического магнитного поля поперечная и продольная составляющие ротора не равны. Это заставляет пластину вращаться вдоль магнитного поля.
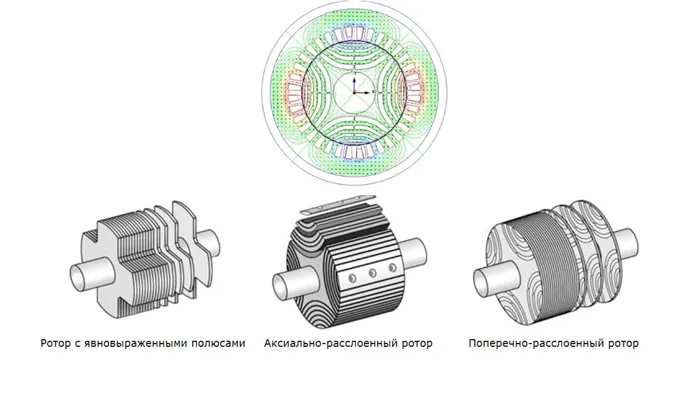
Рис. 7.Пример реактивного бегуна
Все современные двигатели можно классифицировать по расположению полюсов.
- Имеются четко разделенные полюса с явно выраженной полярностью намотки, они используются для низких скоростей.
- неявные столбы — столбы неузнаваемы. Такие модели используются для высоких скоростей.
В зависимости от положения рабочей обмотки различают прямые (в статоре) и обратные (рабочая обмотка в роторе) обмотки.
Режимы работы
Большинство электродвигателей являются реверсивными, и современные двигатели не являются исключением. Они также могут использоваться в качестве электроприводов или генераторов. Обе функции отличаются способом работы электродвигателя — подачей напряжения на рабочую обмотку или перемещением ротора под действием механической силы.
Работа генератора
Современные генераторы используются для выработки электроэнергии для электросети. В большинстве случаев для этой цели используются электродвигатели с фазными обмотками в статоре. Это значительно упрощает процесс получения энергии и последующей передачи ее в сеть. Производство, конечно же, осуществляется за счет воздействия электромагнитного поля обмоток возбуждения современных генераторов со статорными обмотками. Силовые линии чередуют фазные катушки, создавая в них возвратно-поступательный индукционный ток и напряжение на клеммах.
Частота результирующего напряжения напрямую связана со скоростью вращения вала и рассчитывается по следующей формуле
где n — скорость вращения вала, измеряемая в оборотах в минуту, а p — количество пар полюсов.
Современные компенсаторы
Из-за физических характеристик современных двигателей, реактивная мощность берется из сети питания, когда двигатель простаивает, улучшая системный cosφ практически до единицы. На практике функция современных компенсаторов используется для улучшения мощности коэффициент, а также для стабилизации сетевого напряжения.
Работа двигателя
В современных машинах работа двигателя осуществляется путем подачи трехфазного рабочего напряжения на обмотки ротора. Затем электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал начинает вращаться. На практике, однако, двигательная установка не является простой, поскольку большие машины не могут самостоятельно достичь требуемой скорости. Поэтому при вводе в эксплуатацию используются специальные соединения и схемы.
Принципы работы современных двигателей, их КПД и схемы подключения являются основой для создания различных электрических агрегатов. В этом контексте выделяют следующие типы современных машин
Различия синхронных и асинхронных двигателей
Все двигатели переменного тока в принципе могут быть асинхронными или синхронными. В первом случае ротор вращается медленнее, чем магнитное поле, тогда как во втором случае ротор и магнитное поле вращаются с одинаковой скоростью.
В асинхронных двигателях создаются переменные магнитные поля, которые вращаются старыми обмотками. Концы этих обмоток соединены с общим редуктором. Во избежание перегрева вентиляторы установлены на валу двигателя. Ротор состоит из металлических стержней, закрытых с обеих сторон. Деталь с валом называется мантией сепаратора.
Вращение магнитного поля создается за счет непрерывной смены полюсов. Это приводит к изменению направления тока в обмотке. На скорость вращения вала влияет количество полюсов в магнитном поле.
Современные двигатели конструктивно отличаются от асинхронных агрегатов. Здесь ротор и магнитное поле вращаются с одинаковой скоростью.
Напряжение подается на курсор для зарядки обмотки через щетки, а не индуцируется переменным магнитным полем.
Направление тока в притирке меняется одновременно с направлением магнитного поля, поэтому ось современного двигателя всегда вращается в одном направлении.
Разновидности
Современные двигатели находят широкое применение в современной промышленности и бытовой технике. В результате их структурные особенности значительно отличаются. На практике существует несколько критериев, используемых для классификации различных типов современных машин. Согласно ГОСТ 16264.2-85, они могут быть разделены по следующим техническим характеристикам
В зависимости от способа полевой выборки бегуна выделяют следующие типы современных двигателей
- При стимуляции обмотки на бегунке синхронная мощность создается с помощью источника питания с инверторным питанием.
- С магнитными роторами — на валу расположены постоянные магниты. Он выполняет ту же функцию, что и обмотка возбуждения, но не требует питания (см. форму).
Современные магнитные двигатели
Реактивный ротор — магнитопроводы сердечника сконструированы таким образом, чтобы преломляться, так что вся конструкция движется (см. изображение). Под воздействием динамического поля поперечная и продольная составляющие на роторе не равны, и пластины вращаются в поле.
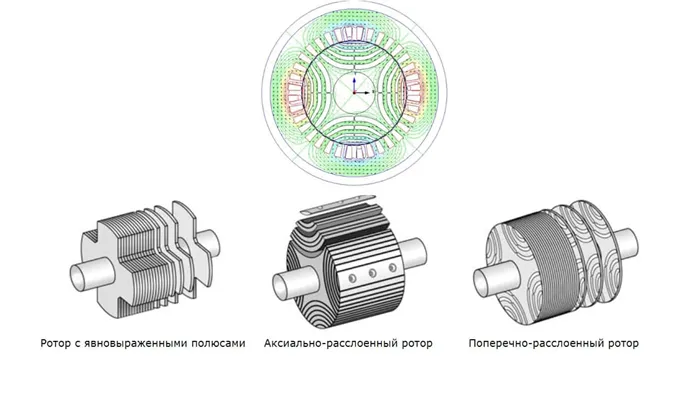
Пример реактивного курсора
Все современные двигатели можно разделить на различные типы, в зависимости от расположения полюсов
- Явный полюс — конструкция четко показывает отдельные полюса в обмотках и используется для низких скоростей.
- Бесшумный столб — столб неузнаваем. Такие модели используются для высоких скоростей.
В зависимости от положения рабочей обмотки различают прямые (в статоре) и обратные (рабочая обмотка в роторе) обмотки.
Сферы применения
Современный двигатель является важным изобретением для многих различных отраслей промышленности. Однако из-за сложной конструкции и высокой стоимости машин они используются редко.
Области применения современных электродвигателей очень ограничены. В большинстве случаев они используются для улучшения характеристик энергосистем, благодаря своей способности работать при любых коэффициентах мощности и отличной экономичности.
Скорость вращения курсора в современных двигателях равна скорости вращения магнитного поля. Независимо от подключенной нагрузки, скорость курсора постоянна, поскольку полюса магнитного поля и курсора одинаковы. Их взаимодействие гарантирует постоянную угловую скорость, независимо от крутящего момента, приложенного к валу.
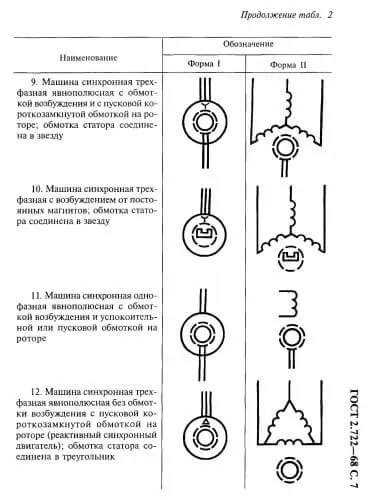
ВИДЫ И ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ СИНХРОННОГО ТИПА
В зависимости от количества обмоток, используемых для создания вращающегося магнитного поля в статоре, все известные модели современных двигателей можно разделить на следующие категории
Последние предназначены для работы при более высоких напряжениях и нагрузках, характерных для промышленного производства. Их эффективная мощность иногда достигает нескольких сотен кВт.
Однофазные двигатели, с другой стороны, могут быть подключены к сети переменного тока с частотой 50 Гц и напряжением 220 вольт. Как правило, мощность этих устройств составляет от 5 Вт до 10 кВт.
Их рабочий КПД значительно ниже, чем у соответствующих трехфазных. Однофазные цепи значительно снижают КПД и пусковой момент двигателя. В то же время эти машины могут выдерживать большие перегрузки осей.
Пуск электродвигателя
Существует два способа запуска современных машин
Схема запуска на основе виртуального возбудителя. Это применимо для статистических моментов нагрузки менее 0,4 без падения напряжения.
Асинхронный пуск с использованием трансформатора.
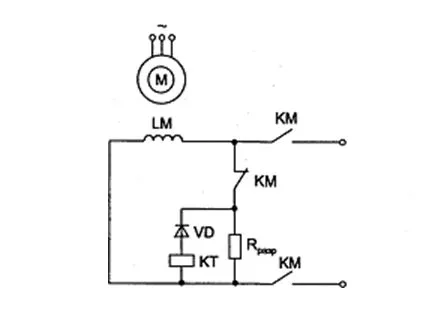
Обмотка возбуждения короткозамкнута разрядным резистором, что позволяет избежать начала возбуждения из-за скачков напряжения на низких скоростях вращения ротора. Когда скорость приближается к синхронной, контактор срабатывает, и обмотка возбуждения переключается с разрядного резистора на якорь привода.
Стимуляция с помощью электромагнитного реле
Запуск тиристоров в полевых условиях является более надежным и эффективным. Управление возбуждением, напряжением канала и аварийным отключением осуществляется более просто. Тиристорные приводы встречаются во многих моделях двигателей. Источник питания возбуждения работает автоматически в зависимости от скорости и тока.
Схема запуска двигателя и его регулировка
Современные двигатели не имеют начального пускового момента. Если обмотка якоря подключена к сети переменного тока, электромагнитный момент меняет направление дважды за цикл тока. Это происходит, когда курсор неподвижен и через обмотку возбуждения протекает постоянный ток.
Поэтому средний крутящий момент имеет нулевое значение в течение определенного периода времени. Чтобы увидеть, как работает современный двигатель при запуске, необходимо разогнать ротор под действием внешнего крутящего момента до скорости вращения, близкой к синхронной.
Сама машина может быть запущена несколькими способами.
- В первом случае используется асинхронная система обмена, основанная на глухо соединенных возбудителях. Этот метод используется, когда статический момент нагрузки меньше 0,4 и нет падения напряжения. Разрядный резистор короткозамкнут в обмотке возбуждения, поэтому перенапряжение возникает при низких скоростях вращения ротора, что позволяет избежать прерывания возбуждения обмотки при запуске. Когда скорость приближается к синхронизации, контактор реагирует на это изменение и переключает обмотку возбуждения непосредственно с разрядного резистора на якорь привода.
- Во втором методе используется тиристорный возбудитель. Этот метод считается более надежным благодаря более высокой эффективности. Контролировать возбуждение гораздо проще. Возбуждение обеспечивается автоматически с помощью электромагнитного реле.
Качество механических свойств оценивается по жесткости. Для этого параметра все признаки полностью делятся на жесткие, нежесткие и мягкие. Поскольку скорость вращения ротора современных двигателей под нагрузкой не меняется, этот тип электродвигателя имеет идеальные характеристики жесткости, которые выражаются следующим уравнением
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, современные «аналоги» имеют определенные преимущества и широко используются в различных отраслях промышленности. Отличительные особенности современных двигателей включают
- Работа при более высоких коэффициентах мощности.
- Высокая производительность по сравнению с асинхронными двигателями Асинхронные двигатели.
- Поддерживает мощность нагрузки даже при падении напряжения в сети.
- Постоянная скорость, независимо от механической нагрузки на вал.
- Экономическая операция.
Современные двигатели имеют некоторые недостатки.
- Очень сложная конструкция делает их производство более дорогим.
- Требуется источник постоянного тока (стимул или выпрямитель).
- Сложность начала работы.
- Угловая скорость должна изменяться путем изменения частоты питающего напряжения.
Однако в некоторых случаях современный двигатель желателен: чтобы
- Для улучшения коэффициента мощности.
- С длительным последним процессом, который не нужно часто запускать и прерывать.
Таким образом, преимущества этих двигателей значительно перевешивают их недостатки, поэтому в настоящее время они пользуются большим спросом.
Ознакомившись с современными двигателями, их устройством, принципом работы и условиями эксплуатации, в которых они используются, вы сможете быстро и легко выбрать тип двигателя (защищенный, закрытый или открытый), который лучше всего подходит для вашего приложение и использовать его везде, где это возможно.
Блок: 4/4 |Шаблон: 1561 Источник: https: //www.szemo.ru/press-tsentr/article/ustroystvo-i-printsip-deystviya-sinkhronnogo//
Схема запуска двигателя и его регулировка
Современные двигатели не имеют начального пускового момента. Если обмотка якоря подключена к сети переменного тока, электромагнитный момент меняет направление дважды за цикл тока. Это происходит, когда курсор неподвижен и через обмотку возбуждения протекает постоянный ток.
Поэтому средний крутящий момент имеет нулевое значение в течение определенного периода времени. Чтобы увидеть, как работает современный двигатель при запуске, необходимо разогнать ротор под действием внешнего крутящего момента до скорости вращения, близкой к синхронной.
Сама машина может быть запущена несколькими способами.
- В первом случае используется асинхронная система обмена, основанная на глухо соединенных возбудителях. Этот метод используется, когда статический момент нагрузки меньше 0,4 и нет падения напряжения. Разрядный резистор короткозамкнут в обмотке возбуждения, поэтому перенапряжение возникает при низких скоростях вращения ротора, что позволяет избежать прерывания возбуждения обмотки при запуске. Когда скорость приближается к синхронизации, контактор реагирует на это изменение и переключает обмотку возбуждения непосредственно с разрядного резистора на якорь привода.
- Во втором методе используется тиристорный возбудитель. Этот метод считается более надежным благодаря более высокой эффективности. Контролировать возбуждение гораздо проще. Возбуждение обеспечивается автоматически с помощью электромагнитного реле.
Единица измерения: 4/5 | Количество символов: 1590 Источник: https://electric-220.ru/news/princip_dejstvija_sinkhronnogo_dvigatelja/2013-12-05-465
Способы запуска
- Запуск современного двигателя через вспомогательный двигатель. Синхронный двигатель механически соединен с другим двигателем. Это может быть трехфазный асинхронный двигатель или двигатель постоянного тока. Первоначально постоянный ток не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной, а затем подается постоянный ток. После замыкания магнитного поля связь от вспомогательного двигателя прерывается.
- Асинхронный запуск. На клеммах полюсов ротора установлена дополнительная обмотка короткого замыкания. При подаче напряжения на обмотку статора возникает вращающееся магнитное поле. Пересекая обмотку червячной клетки, встроенную в концы ротора, это вращающееся магнитное поле индуцирует в нем токи, которые, объединяясь с вращающимся полем статора, вызывают вращение ротора. При достижении синхронной скорости снижается ЭЭД и крутящий момент. Наконец, когда магнитное поле замкнуто, крутящий момент также уменьшается до нуля. Таким образом, синхронная скорость сначала инициируется асинхронным двигателем с помощью вспомогательной обмотки.
Блок: 4/5 | Количество символов: 1163 Источник: https://www.asutpp.ru/princip-raboty-sinxronnogo-dvigatelya.html
Ознакомившись с современными двигателями, их устройством, принципом работы и условиями эксплуатации, в которых они используются, вы сможете быстро и легко выбрать тип двигателя (защищенный, закрытый или открытый), который лучше всего подходит для вашего приложение и использовать его везде, где это возможно.
Механические и энергетические характеристики синхронных двигателей
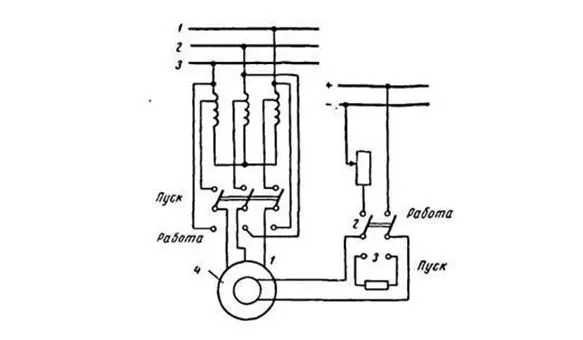
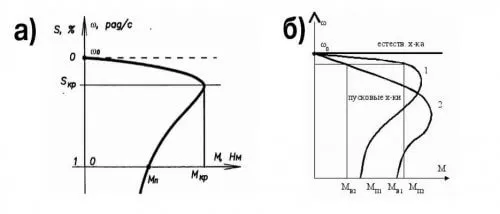
Трехфазные синхронные двигатели (PM) широко используются для привода самых разных технологических машин. Схема подключения SP показана на рисунке 2.21a, а механические характеристики — на рисунке 2.21b.
Рис. 2.21. a) Схема подключения современного двигателя,
(b) Механические характеристики синхронного двигателя во время запуска и синхронного вращения.
Статор SD построен аналогично статору AD — три обмотки статора размещены на статоре таким образом, что оси генерируемых ими потоков смещены в пространстве на 1200. Подключение обмоток статора, обозначенных как S1, S2, S3 на рис. 2.21a, к трехфазной сети переменного тока со сдвигом напряжения между фазами на 120 электрических градусов приводит к появлению магнитного поля, вращающегося с синхронной скоростью ω0=2πf1/p
。 Здесь p — число пар полюсов статорных обмоток сверхпроводника; f1 — частота сети. При p=1 вращающееся поле представляет собой два диаметрально противоположных северного (N) и южного (S) полюса, вращающихся со скоростью ω0 .
Конструкция ротора включает две обмотки: обмотку возбуждения и короткозамкнутую пусковую обмотку сепаратора. На обмотку возбуждения подается постоянное напряжение, и при подаче тока она преобразуется в электромагнит постоянного тока, полюса которого, в зависимости от скорости вращения, могут стать либо явными, либо отрицательными, т.е. обмотка возбуждения распределяется по внешней поверхности ротора.
Когда ротор неподвижен, полюса вращающегося поля статора и ротора не успевают притянуться. Вращающий момент двигателя равен нулю, а в поле статора индуцируется настолько сильное электрическое напряжение, что может произойти пробой изоляции поля.
Чтобы притянуть противоположные полюса статора и ротора (входящая синхронизация) и в то же время избежать чрезмерных бросков тока, ротор должен быть разогнан до субсинхронной скорости ωp
Читайте также: Getling B.V. Гетлинг, гетлинг, гетлинг. Чтение и составление чертежей и схем электрических схем.
Пособие для учителей средней школы. Это и есть назначение пусковой обмотки с короткозамкнутым витком, т.е. двигатель запускается как двигатель с короткозамкнутым витком. Пусковые характеристики АД с различными вариантами пусковой обмотки показаны на рисунке 2.21b.
Характеристика 1 имеет входной крутящий момент MP1
меньше, чем начальный момент функции 2 — MP2 , но входной момент при синхронизации MV1 больше, чем MV2. Выбор пусковой характеристики определяется конкретными условиями эксплуатации двигателя подводной лодки. Для разрядки резистора при запуске обмотка возбуждения замыкается накоротко, что защищает ее изоляцию от перенапряжения. Он подключается к источнику постоянного напряжения после того, как скорость ротора ω достигнет субсинхронной скорости ωP. Пусковая обмотка сильно нагревается во время фазы запуска, поэтому время тока ограничено.
После возникновения синхронизации его частота вращения при изменении величины момента сопротивления на валу достигает некоторого максимального значения Mmax
остается постоянной и равной скорости вращающегося магнитного поля — синхронной скорости ω0. Поэтому его механическая характеристика, показанная на рис. 2.21b, представляет собой линию, параллельную оси отклонения. Если Mc превышает Mmax, SD может выйти из синхронизации.
Виды синхронных двигателей
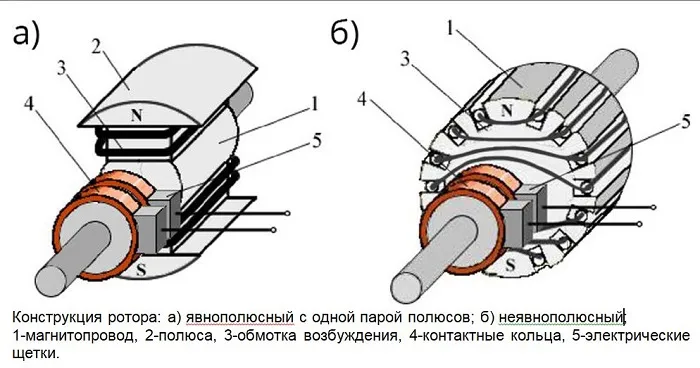
В основном, все отличия в конструкции такого устройства заключаются в модификации вращающейся части. Ротор синхронной машины может работать либо с явными полюсами (далее «явно поляризованный»), либо с неявными полюсами (далее «неявно поляризованный»).
- Неявно поляризованный ротор обычно имеет четко обозначенные, выступающие полюса, на которых установлены катушки возбуждения.
- Бегунок без полюсов сопротивления обычно представляет собой цилиндр из ферромагнитного сплава, поверхность которого обработана для получения осевых прорезей. Затем в эти пазы устанавливаются обмотки возбуждения.
Конструкция ротора
Как и все остальное, современные электродвигатели состоят из двух основных частей
- Статор. Здесь находятся обмотки. Его также называют вооружением.
- Ротор. Он оснащен постоянными магнитами или обмотками возбуждения. Также называется индуктором, так как предназначен для создания магнитного поля).
На роторе установлены два кольца для подачи питания на обмотку возбуждения (поскольку возбуждение осуществляется постоянным током, на одно подается «+», а на другое — «-«). Щетки устанавливаются в щеткодержатели.
Современные двигатели переменного тока имеют два типа бегунков, в зависимости от применения.







