Если двигатель обычно подключен к треугольной схеме, его можно подключить к звезде, чтобы уменьшить пусковой ток при запуске. В этом случае вместе с пусковым током уменьшается и пусковой момент.
Текст книги «Электроника и электротехника. Шпаргалка»
— это относительная разница между скоростью вращения ротора и потоком переменного тока, создаваемого обмотками статора двигателя переменного тока. Скольжение можно измерять в относительных единицах и процентах.
Где n — скорость вращения ротора индукторного двигателя.
n_1 — это скорость периодического изменения магнитного потока в статоре, которая называется скоростью синхронного двигателя.
Где f — частота источника переменного тока.
число пар полюсов в обмотке статора (число пар катушек на фазу).
Как видно из последнего вида, скорость вращения двигателя n фактически определяется значением его синхронной скорости, причем последняя при стандартной частоте 50 зависит от числа пар полюсов: -3000 об/мин для одной пары полюсов, -1500 об/мин для двух пар, -1000 об/мин для трех пар и т.д.
Если на валу нет нагрузки в виде шестерен или редуктора, асинхронный двигатель работает на холостом ходу. При сборке нового двигателя всегда проводится испытание холостого хода для определения потерь в подшипниках, вентиляторе, магнитных цепях и токов намагничивания. В режиме холостого хода скольжение составляет S = 0,01÷0,08.
Обратите внимание, что существует также идеальное состояние холостого хода, когда n2 = n1, что практически невозможно достичь, даже если не учитывать трение в подшипниках. Важно отметить, что асинхронные двигатели должны гарантировать, что ротор не достигнет магнитного поля статора. Если оно запаздывает, магнитное поле статора будет индуцировать магнитное поле на роторе, тем самым заставляя ротор вращаться за магнитным полем статора.
Если на катушку статора подается напряжение и ротор вращается в направлении магнитного поля с частотой n> n 1 n_>, то направление вращения ротора относительно магнитного поля статора меняется на противоположное (по сравнению с работой двигателя). Это происходит потому, что бегунок обгоняет поле статора. Это приводит к тому, что скольжение становится отрицательным и изменяет направление АДР, индуцированного в обмотках ротора. Таким образом, в режиме генератора скольжение находится в диапазоне -∞.< s < 0
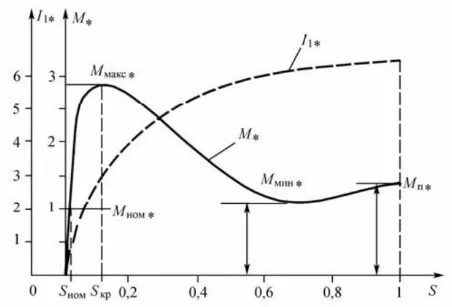
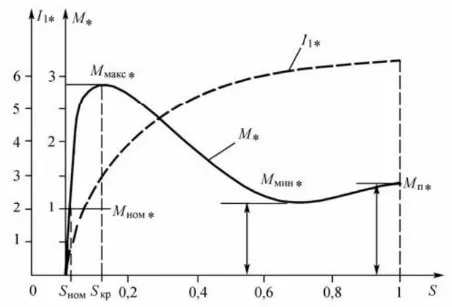
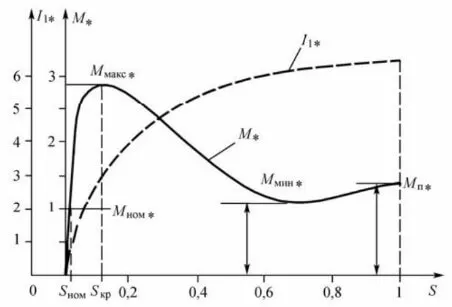
По мере постепенного увеличения нагрузки двигателя увеличивается скольжение (ротор все больше отстает от вращающегося магнитного поля), ток, индуцируемый в роторе, увеличивается пропорционально скольжению, и крутящий момент увеличивается пропорционально этому. Поэтому для малых нагрузок крутящий момент пропорционален скольжению. Однако, по мере увеличения скольжения, крутящий момент увеличивается медленнее, чем скольжение, поскольку ток ротора уменьшается из-за увеличения эффективных потерь ротора, и при определенном скольжении крутящий момент достигает максимума, а затем начинает уменьшаться. Скольжение, при котором крутящий момент достигает максимума, называется критическим скольжением.
После ужина правитель встал, доел печенье и вышел на балкон. Люди бросились на балкон, где в центре стоял Петиас. — «Геле, отец! Отец, я буду жить долго. -кричали народ и Петя. И снова женщины и некоторые из самых слабых мужчин, включая Петю, заплакали от радости. Довольно большое печенье, которое правитель держал в руке, сломалось и упало на перила балкона, а затем с перил на землю. Стоявший неподалеку кучер в нижнем белье подбежал к куску печенья и схватил его. Некоторые из толпы побежали к кучеру. Заметив это, император приказал подать тарелку с печеньем и начал бросать печенье с балкона. Глаза Пети налились кровью, риск быть раздавленным возбудил его еще больше, и он упал в печенье. Он не знал почему, но ему нужно было взять печенье из рук императора, и он вынужден был сопротивляться. Он выбежал на улицу и бросил на землю старуху, которая держала печенье. Но старуха не считала себя побежденной, хотя и лежала на земле (печенье было у нее, и она не ударила его рукой). Петиас ударил ее по руке коленом, схватил печенье и, словно боясь, что она опоздает, снова закричал «Да здравствует!». ‘ — хрипло крикнул он. Император уехал, после чего большинство людей начали распадаться. Вы сказали, что нам нужно подождать еще немного, и мы подождали», — говорили люди со всех сторон. Полк. На следующий день, хотя он еще не полностью ушел в отставку, граф Илиас отправился посмотреть, не может ли он найти более безопасное место, чтобы поместить Петиаса. Медали, козлиная бородка и синий кафтан. На портретах правителей самые важные вельможи сидели в высоких креслах, а большинство прогуливалось по коридорам.
Принцип работы трехфазного асинхронного двигателя очень прост. Напряжение питания подается на обмотки статора и генерируется магнитный поток. В каждой фазе магнитный поток смещается на 120°. Накопленный магнитный поток вращается.
Значение — критическое скольжение
Одним из важных моментов при анализе и выборе характеристик двигателя является точка, в которой крутящий момент, создаваемый двигателем, достигает своего максимального значения. Эта точка имеет координаты и kr, sKp и Mmax. Значение критического скольжения sKp, при котором двигатель производит максимальный (критический) крутящий момент Mmax, можно легко определить, взяв производную dM / ds от уравнения (10.51) и приравняв ее к нулю.
| Переходный процесс средний крутящий момент двигателя и относительное время запуска ненагруженного асинхронного двигателя является функцией критического скольжения. |
Сопротивление цепи ротора и, следовательно, степень влияния критического значения скольжения на темп работы двигателя определяется отношением двух членов справа от последнего уравнения. Если критическое скольжение мало, значение первого члена увеличивается, а второго — уменьшается. Поэтому существует конкретное значение критического скольжения, при котором скорость разгона двигателя является оптимальной. Это значение соответствует максимальному среднему значению крутящего момента в период разгона двигателя. На графике слева (рис. 2-13 a) показаны механические характеристики двигателя при различных значениях критического скольжения, а на графике справа (рис. 2-13 6) — диаграмма разгона двигателя при соответствующих значениях критического скольжения.
Кривая имеет два крайних значения. Координаты крайних значений кривой называются критическими точками. Таким образом, кривая имеет два критических значения крутящего момента и соответствующее критическое значение скольжения.
Номинальное скольжение зависит от сопротивления курсора. Как правило, двигатели со стандартными характеристиками и короткозамкнутыми бегунками имеют самое низкое номинальное скольжение при одинаковой номинальной мощности и одинаковом количестве полюсов. Для этих двигателей сопротивление ротора относительно мало из-за конструктивных особенностей, что приводит к критическому скольжению s:c (3,37) и уменьшенному номинальному скольжению SHOM. По этой же причине с увеличением мощности двигателя номинальное скольжение уменьшается, а физическая жесткость увеличивается. Последнее иллюстрируется кривой на рис. 3.26, по отношению к средним данным для двигателей различной мощности.
| Кривые номинального скольжения для асинхронных двигателей различной мощности. |
Величина номинального скольжения зависит от сопротивления ротора. В целом, стандартные короткозамкнутые двигатели, как правило, имеют меньшее номинальное скольжение при той же номинальной мощности и том же количестве полюсов. Благодаря конструктивным особенностям этих двигателей, сопротивление ротора относительно низкое, что приводит к более низкому критическому скольжению SK и номинальному скольжению SH. По этой же причине с увеличением мощности двигателя номинальное скольжение уменьшается, а естественная жесткость кривой увеличивается. Последнее иллюстрируется кривыми на рисунке 2-35, которые основаны на средних данных для двигателей различной мощности.
Значение номинального скольжения является функцией сопротивления ротора. В целом, двигатели со стандартными характеристиками и закороченными бегунками сепаратора имеют самое низкое номинальное скольжение при одинаковой номинальной мощности и одинаковом количестве полюсов. Благодаря конструктивным особенностям этих двигателей, сопротивление ротора относительно низкое, что приводит к снижению критического скольжения SK и номинального скольжения SH. По этой же причине уменьшение номинальной скорости двигателя снижается, а жесткость физических свойств увеличивается с ростом выходной мощности. Последнее иллюстрируется кривыми на рис. 2-35, которые основаны на средних данных для двигателей различной мощности.
ТОК В ОБМОТКЕ РОТОРА
Из вышеприведенного обсуждения переменного КПД и реакции обмотки ротора можно сделать вывод, что ток ротора I2 = E2 сек./√(r 2)2 + x 22 сек.).
Он также изменяется при изменении скорости вращения. Поскольку E2 велико, а реакция обмотки x2 обычно в 8-10 раз больше активного сопротивления r2, пусковой ток I2n должен быть большим и задержанным на больший угол Ψ2, чем выходной ток.
При вращении ротора E2S и X2S уменьшаются. В результате ток I2 и угол ψ2 уменьшаются. Это очень важно, потому что это существенное различие между трансформаторами и индукционными двигателями.
Статья под названием «Работа индуктивных двигателей».
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение практически равно нулю, n составляет 2-3%.1 Почти равна n2. В этом случае поле статора не пересекается с полем бегунка, поскольку, говоря простым языком, двигатель не вращается и напряжение питания не подается.
Даже в идеальном, ненагруженном режиме работы значение скольжения, выраженное в процентах, не равно нулю. Если двигатель работает в режиме генератора, S может принимать и отрицательные значения.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞
Имеется также функция электромагнитного тормоза (вращение ротора). В этой функции цена скольжения находится над единицей и имеет знак syn.
Частота кругов бегуна равна частоте сети только на старте. При номинальной нагрузке частота определяется типом
где f1 — Это частота тока старого круга, S соскальзывает.
Частота тока в бегунке прямо пропорциональна индуктивному сопротивлению. Поэтому ток бегунка зависит от скольжения рекламного механизма. Крутящий момент электродвигателя зависит от величины S, которая определяется значением магнитного тока, тока и угла коммутации между ЭЭД и бегущим током.
Поэтому для детального изучения характеристик рекламного двигателя определяются взаимосвязи, показанные на приведенной выше диаграмме. Поэтому изменения крутящего момента двигателя PF (различные значения скольжения) могут быть проверены путем включения сопротивления в цепь обмотки бегунка. В двигателях с коротким замыканием крутящий момент регулируется с помощью преобразователей частоты или с помощью двигателей переменного тока.
При номинальной нагрузке двигателя величина скольжения составляет от 8% до 2% (для двигателей малой и средней мощности) и является номинальным скольжением.
Скольжение можно легко увеличить, увеличив нагрузку на вал (крутящий момент на валу). Легко, магнитное поле курсора отстает от магнитного поля статора. Увеличение скольжения приводит к пропорциональному увеличению тока в бегунке и, следовательно, к пропорциональному увеличению крутящего момента. Однако это увеличивает активные потери курсора (увеличение сопротивления) и уменьшает увеличение тока, поэтому крутящий момент увеличивается медленнее, чем скольжение.
При определенном значении скольжения крутящий момент достигает своего максимального значения, а затем начинает уменьшаться. Значение, при котором крутящий момент максимален, называется критическим значением (SCR).
Механические характеристики асинхронных двигателей можно представить графически с помощью крестовины.
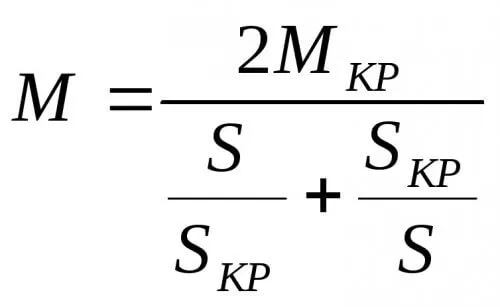
Здесь мfi. — Это критический крутящий момент, который определяется критическим скольжением двигателя.
Схема разработана на основе характеристик, приведенных в техническом паспорте двигателя. Эта схема используется в качестве движителя с асинхронными электродвигателями, когда возникают вопросы движения.
Критический момент определяет допустимую величину мгновенной перегрузки электродвигателя. Если крутящий момент будет выше критического (и, соответственно, выше критического скольжения), двигатель SO -CALLED перевернется и двигатель остановится. Опрокидывание — одна из аварийных ситуаций.
Частота вращения этого поля, или частота синхронного вращения, прямо пропорциональна частоте переменного тока f.1 Он обратно пропорционален количеству пар полюсов в трехфазной обмотке.
Что такое скольжение асинхронного двигателя
Скольжение — одна из главных особенностей электродвигателей. Он зависит от режима работы, нагрузки на вал и напряжения питания. Давайте подробнее рассмотрим, что такое проскальзывание двигателя, от чего оно зависит и как его определить.
Принцип работы трехфазного асинхронного двигателя очень прост. Напряжение питания подается на обмотки статора и генерируется магнитный поток. В каждой фазе магнитный поток смещается на 120°. Накопленный магнитный поток вращается.
Обмотка ротора представляет собой замкнутый контур, в ней индуцируется АДР, а результирующий магнитный поток заставляет ротор вращаться в направлении потока статора. Вращающий электромагнитный момент пытается уравновесить скорость вращения магнитных полей статора и ротора.
Величина, определяющая разницу между скоростями вращения магнитных полей ротора и статора, называется скольжением. Обычно он меньше 1, так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора. Он может быть измерен в относительных единицах или в процентах.
Он рассчитывается по следующей формуле

где n1скорость вращения магнитного поля, n2 — скорость магнитного поля ротора.
Проскальзывание является важной характеристикой нормальной работы асинхронных двигателей.
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение практически равно нулю, n составляет 2-3%.1 Почти равна n2. В этом случае поле статора не пересекается с полем бегунка, поскольку, говоря простым языком, двигатель не вращается и напряжение питания не подается.
Даже в идеальном, ненагруженном режиме работы значение скольжения, выраженное в процентах, не равно нулю. Если двигатель работает в режиме генератора, S может принимать и отрицательные значения.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞
Имеется также функция электромагнитного тормоза (вращение ротора). В этой функции цена скольжения находится над единицей и имеет знак syn.
Частота кругов бегуна равна частоте сети только на старте. При номинальной нагрузке частота определяется типом
где f1 — частота тока в обмотке статора, а S — скольжение.
Частота тока в бегунке прямо пропорциональна индуктивному сопротивлению. Поэтому ток бегунка зависит от скольжения рекламного механизма. Крутящий момент электродвигателя зависит от величины S, которая определяется значением магнитного тока, тока и угла коммутации между ЭЭД и бегущим током.
Поэтому для детального изучения характеристик рекламного двигателя определяются взаимосвязи, показанные на приведенной выше диаграмме. Поэтому изменения крутящего момента двигателя PF (различные значения скольжения) могут быть проверены путем включения сопротивления в цепь обмотки бегунка. В двигателях с коротким замыканием крутящий момент регулируется с помощью преобразователей частоты или с помощью двигателей переменного тока.
При номинальной нагрузке двигателя величина скольжения составляет от 8% до 2% (для двигателей малой и средней мощности) и является номинальным скольжением.
Скольжение можно легко увеличить, увеличив нагрузку на вал (крутящий момент на валу). Легко, магнитное поле курсора отстает от магнитного поля статора. Увеличение скольжения приводит к пропорциональному увеличению тока в бегунке и, следовательно, к пропорциональному увеличению крутящего момента. Однако это увеличивает активные потери курсора (увеличение сопротивления) и уменьшает увеличение тока, поэтому крутящий момент увеличивается медленнее, чем скольжение.
При определенном значении скольжения крутящий момент достигает своего максимального значения, а затем начинает уменьшаться. Значение, при котором крутящий момент максимален, называется критическим значением (SCR).
Механические характеристики асинхронных двигателей можно представить графически с помощью крестовины.
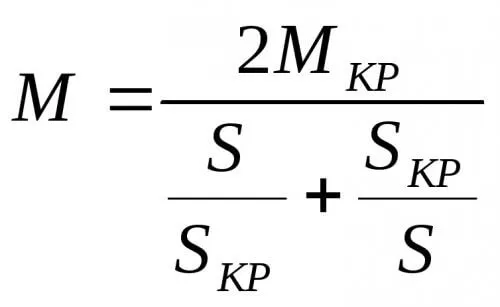
Здесь мfi. — Это критический крутящий момент, который определяется критическим скольжением двигателя.
Схема разработана на основе характеристик, приведенных в техническом паспорте двигателя. Эта схема используется в качестве движителя с асинхронными электродвигателями, когда возникают вопросы движения.
Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от последней, ее можно измерить с помощью спидометра или щитовидной трубы, прикрепленной к валу ЭП.
Измерения с помощью неоновых ламп подходят для значений скольжения до 5%. Для этого на валу двигателя рисуются линии дроссельной заслонки или устанавливается специальный стробоскопический диск. Он освещается неоновой лампой, а вращение измеряется в течение определенного периода времени и рассчитывается с помощью специального типа. Можно также использовать полный стробоскоп, как показано ниже.
Метод индукционной катушки также подходит для измерения величины скольжения на всех типах машин. Для скоростных номеров (10-20 000) лучше использовать катушки, чем реле или контакты с непрерывным контактом. Номер скорости должен быть не менее 3000. Конец вала бегунка. В зависимости от расхождения индекса (частоты) оборудования за определенный период времени, величина скольжения рассчитывается по одному из типов. Кроме того, скольжение может быть измерено с помощью магнитного амперметра на двигателе с кинетической фазой. Амперметр подключается к одной из фаз курсора, и для расчета используется число преобразований показателя амперметра (при использовании типа метода индукционной катушки).
Теперь мы рассмотрели функции скольжения асинхронных двигателей и способы их определения. Если у вас есть вопросы, задавайте их в комментариях под статьей!
При номинальной нагрузке двигателя величина скольжения составляет от 8% до 2% (для двигателей малой и средней мощности) и является номинальным скольжением.
Скольжение — асинхронный двигатель
Динамические характеристики нагрузки определяют изменение скольжения асинхронного двигателя при определенном значении напряжения в течение различных периодов времени. Установившиеся значения скольжения используются для определения активного и неактивного сопротивления асинхронных нагрузок.
(Из (2.21) видно, что при увеличении скольжения асинхронного двигателя, т.е. при уменьшении скорости из-за увеличения нагрузки, ток ротора увеличивается и достигает максимального значения при s1. То есть, когда ротор неподвижен. С увеличением скольжения увеличивается индуцированное сопротивление ротора X1S-Es, поэтому ток ротора при увеличении скольжения растет не так быстро, как АДР.
Относительная разница в скорости на единицу Av аналогична скольжению в асинхронных двигателях, но скольжение в двигателях постоянного тока не имеет такого физического значения, как в асинхронных двигателях.
| Система регулирования скорости асинхронного двигателя с тиристорным регулятором напряжения Реверсивная система регулирования скорости электромеханический водопад электрический водопад. |
В электрических водопадах (рис. 3.75) мощность скольжения асинхронного двигателя AD возвращается к двигателю постоянного тока после инвертора с синхронным генератором SG на валу. Современные генераторы подают электроэнергию в сеть. В этой схеме питание токосъемника подается на сеть.
Пульсирующее напряжение увеличивает среднее скольжение асинхронного двигателя. Это увеличивает время, необходимое для достижения двигателем максимальной нагрузки, что приводит к дальнейшей потере мощности двигателя. По мере увеличения скольжения количество колебаний уменьшается, что приводит к снижению мощности как отдельных агрегатов, так и поля в целом. Кроме того, частые падения кривой напряжения удлиняют и без того громоздкий процесс запуска двигателей насосов от сети.
В асинхронно-синхронных каскадах момент синхронного двигателя Med определяется мощностью скольжения асинхронного двигателя.
Суть этих машин и устройств заключается в том, что энергия скольжения асинхронного двигателя при регулировании скорости возвращается на вал двигателя или в магистраль, как и в случае с одновальными преобразователями.
| Шторм Щербиуса для управления скоростью с помощью дпугого пояса. |
Когда водопад переключается на синхронную скорость, необходимо изменить знаки скольжения асинхронного двигателя, соответственно вращая конечную и начальную точки обмотки возбуждения B.
При таком типе расчета для каждого периода необходимо задавать новые значения активного и пассивного сопротивления нагрузки в соответствии с изменением скольжения асинхронного двигателя.
Метод связанных единиц широко распространен — он используется в теории электродвигателей и теории электрического движения и представляет величину сопротивления электродвигателя и трансформатора, скольжения асинхронного двигателя в относительных единицах, напряжения на
Повышение напряжения сети приводит к увеличению общей эффективной нагрузки системы за счет увеличения бытовой нагрузки, мощность которой сильно зависит от напряжения, и уменьшению скольжения асинхронного двигателя, при этом потери мощности сети уменьшаются. Из-за увеличения эффективной нагрузки повышение напряжения приводит к снижению частоты. Этого можно избежать благодаря работе автоматического регулятора частоты при наличии эффективного запаса хода. Снижение напряжения также приводит к снижению активной нагрузки системы, что в свою очередь приводит к увеличению частоты. Если в случае неисправности активная и реактивная мощность недостаточны, значительное снижение частоты может быть в некоторой степени предотвращено путем снижения напряжения.
18.6 Поворотные трансформаторы
Это электродвигатели переменного тока, предназначенные для преобразования угла поворота q в напряжение, пропорциональное некоторой функции угла поворота ротора sin q или cosq, а также самого угла q. Они используются в компьютерной технике для выполнения различных математических операций. Поворотные трансформаторы используются для решения геометрических задач, таких как треугольники, преобразования координат, разложение и построение векторов. В системах автоматического управления поворотные трансформаторы используются в качестве измерителей расстояния, которые регистрируют отклонение системы от определенного положения.
Роторный трансформатор — это асинхронная машина малой мощности. Он имеет две обмотки, C1-C2 и C3-C4, установленные перпендикулярно статору. Первая называется основной обмоткой, а вторая — квадратной обмоткой. Обмотки статора идентичны, то есть имеют одинаковое количество витков. Ротор может иметь одну обмотку, но чаще всего их две. На рис. 5.18.6.1 показаны схемы подключения синусного, косинусного и синусно-синусного поворотных трансформаторов.
Устройство асинхронного двигателя
Основными частями двигателя являются статор и ротор. Три обмотки расположены на полюсах сердечника в форме железного кольца, так называемые трехфазные сети 0 расположены относительно друг друга строго под углом 120 градусов. Следует также отметить, что внутри самого сердечника находится цилиндр из высококачественного металла, закрепленный на той же оси. Он называется — ротор.
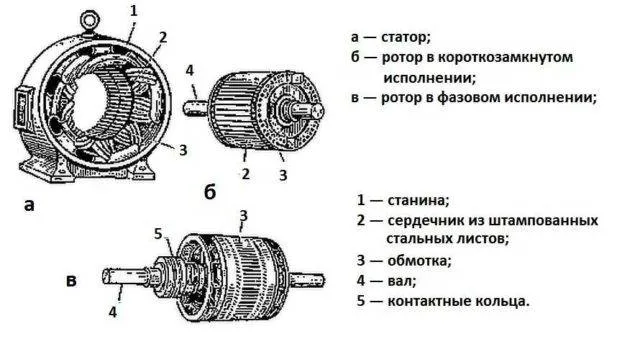
Из чего состоит асинхронный электродвигатель?
Stati
Статор — это неподвижная часть, которая создает вращающееся магнитное поле. Это поле вступает в непосредственный контакт с электромагнитным полем движущейся части, называемой ротором, и таким образом происходит полное вращение ротора.
Конструкция статора
- Во-первых, это корпус, который изготавливается из чугуна, но часто встречаются и алюминиевые корпуса.
- Следующий этап — сердечник, который изготавливается из пластин электротехнической стали толщиной 0,5 мм. Пластины сердечника сшиваются или свариваются между собой, покрываются изоляционным лаком и крепятся к раме с помощью стопорных винтов.
- Наконец, статор имеет обмотки, смещенные относительно друг друга на 120 градусов, обычно не более трех в устройстве, вставленные в пазы внутри самого сердечника, изготовленные из изолированного медного или алюминиевого провода круглого/квадратного сечения.
Сердечник статора
Это конструкция с валом без промежуточной втулки. Адаптер сердечника используется для двигателей с высотой прямого вала 250 мм без выемки. В более крупных двигателях сердечники крепятся к валу. Если диаметр ротора составляет 990 мм, сердечник формируется из разных секций.
Обмотка статора и число оборотов двигателя
Число оборотов электродвигателя можно определить только через обмотку. В этом нет ничего сложного, просто следуйте инструкциям, и все будет хорошо.これをする:.
- Снимите крышку с двигателя.
- Найдите один из отрезков и посмотрите, сколько места он занимает по окружности самого круга. Например, если катушка занимает половину окружности — то есть 180 градусов — то двигатель выходит на 3 000 об/мин.
- Если окружность занимает три сегмента под углом 120 градусов, то это двигатель с частотой вращения 1 500 об/мин.
- Если катушка помещается в четыре сегмента под углом 90 градусов, двигатель выходит на 3 000 об/мин.
Ротор
Он вращается внутри самого статора (объяснение текущей ситуации приведено выше). Ротор является элементом двигателя. Его вал связан с компонентами батареи. В случае компактных бегунков это цельный стальной цилиндр, расположенный внутри статора с сердечником, не соединенным с его поверхностью (о сердечнике также говорилось выше).
Роторы имеют другие:.
- фазы (размещаются в пазах сердечника при намотке и подключаются к звезде), и
- Короткие замыкания (отлиты на поверхности сердечника и циркулируют по двум высокопроводящим бронзовым кольцам).
Строительство короткой циркулярной клетки для духовенства
Эту обмотку специалисты часто называют «червячной клеткой» из-за того, что ее внешняя структура очень похожа. Он состоит из алюминиевого стержня с двумя замыкающими кольцами на концах. Эти стержни обычно вставляются в щель в сердцевине самого курсора.
Существует несколько способов измерения скорости проскальзывания двигателя. Если частота вращения значительно отличается от последних оборотов, то это определяется с помощью тахометра или щитовидной трубы, установленной на валу асинхронного двигателя.
Подключение асинхронного двигателя
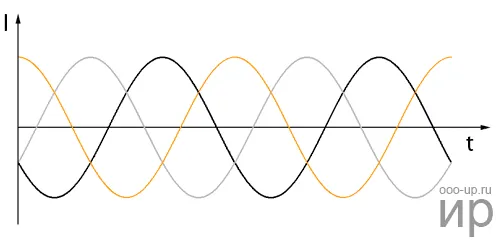
Трехфазный переменный ток
Трехфазный переменный ток является наиболее распространенным видом электротранспорта. Основное преимущество трехфазных систем перед однофазными и двухфазными заключается в их экономической эффективности. В трехфазной цепи синусоиды различных фаз имеют одинаковую частоту и ширину, поскольку токи в различных проводниках смещены на 120°, проходя через три различных проводника.
Звезда и дельта
Статоры старых трехфазных двигателей подключаются по схеме «звезда» или «треугольник» в зависимости от напряжения питания. Концы трехфазной обмотки соединяются в двигателе (три кабеля выходят из двигателя), выводятся наружу (шесть кабелей выходят из двигателя) и подводятся к коробке ответвлений (шесть кабелей выходят из коробки и три отходят от коробки).
Фазовый тренд — это возможная разница между началом и концом фазы. Другое определение соединения звездой: фазное напряжение — это разность потенциалов между линейным проводом и нейтралью (обратите внимание, что в треугольном соединении нейтраль отсутствует).
Линейное напряжение — это динамическая разность между двумя линейными каналами (между фазами).
| Звезда | Delta | Назначение |
|---|---|---|
| uδ, uv — линейные и фашистские тенденции, v, v | ||
| Iδ, Iv — Линейные и фашистские течения, a, a | ||
| S — полная мощность, w | ||
| P — активная мощность, w |
ВНИМАНИЕ: Мощность соединений звездой и треугольником рассчитана для одного типа, но подключение одного и того же двигателя в одной и той же установке разными способами приведет к разной потребляемой мощности. Неправильные соединения могут привести к расплавлению обмоток статора.
Пример: предположим, что электродвигатель подключен к схеме «звезда» трехфазной сети переменного токаδ= 380 В (или uv= 220 В) и потребляет токδ= 1�. Общая потребляемая мощность:.
Здесь диаграмма входа меняется на треугольник, напряжение сети остается прежним uδ= 380 В, но фашистское напряжение увеличивается в 3 раза (маршрут 3)v= uδ=380 В; увеличение фазного напряжения увеличивает фазный ток в три раза. Поэтому линейный ток в треугольной цепи в три раза выше, чем линейный ток в звездообразной цепи. Соответственно, потребление энергии также в три раза выше.
Если двигатель рассчитан на 3-фазное соединение звездой переменного тока, треугольное соединение может повредить двигатель.
Управление асинхронным двигателем
-
Способы подключения асинхронного электродвигателя к сети питания:
- Подключение через пускатель плавного пуска
Прямое подключение к сети
Магнитные пускатели можно использовать для управления асинхронными двигателями, подключая двигатель непосредственно к сети переменного тока.
Магнитные пускатели можно использовать для реализации схем.
Тепловые реле могут использоваться для защиты двигателя от значений тока, значительно превышающих номинальное значение.
Необратимые цепи
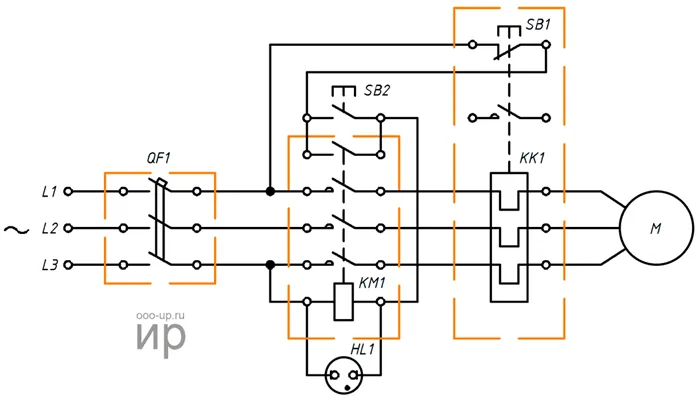
Схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного тока через магнитные пускатели L1, L2 и L3 — контакты для подключения к трехфазной сети переменного тока, QF1 — выключатель питания, SB1 — кнопка стоп, SB2 — кнопка пуск, кнопка пуск, KK1 — тепловое реле, HL1 — сигнальная лампочка, M -Трехфазный асинхронный двигатель
Реверсивная электрическая схема
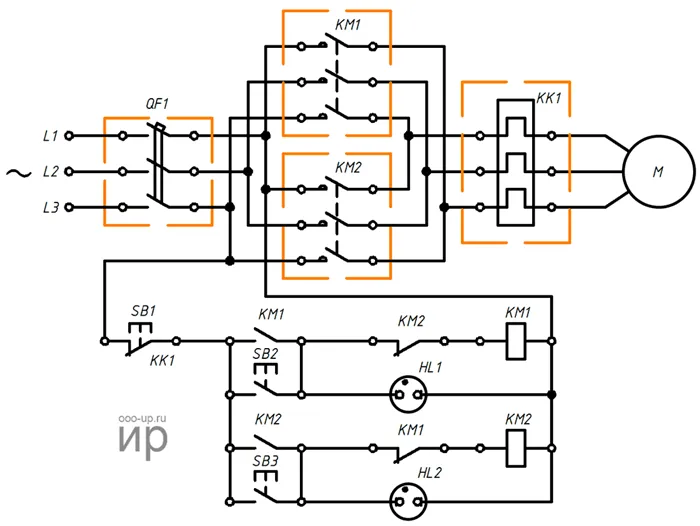
Реверсивная электрическая схема для подключения 3-фазного асинхронного двигателя к 3-фазной сети переменного тока через магнитные пускатели L1, L2, L3 — контакты для подключения к 3-фазной сети переменного тока, QF1 — выключатель питания, KM1, KM2 — магнитные, K1 M — 3-фазный асинхронный двигатель, SB1 — кнопка остановки, SB2 — пуск вперед кнопка, SB3 — кнопка запуска заднего хода, HL1, HL2 — индикаторные лампы
Недостатком прямого переключения между сетью и обмоткой асинхронного двигателя является высокий пусковой ток, возникающий при запуске электродвигателя.
Устройство плавного пуска для асинхронных двигателей
В тех случаях, когда скорость двигателя не нужно регулировать во время работы, для снижения пускового тока используются плавные пускатели.
Плавные пускатели защищают асинхронные двигатели от повреждений, вызванных внезапным увеличением потребляемой мощности во время пуска, и ограничивают пусковой ток. Плавные пускатели позволяют асинхронным двигателям плавно ускоряться и замедляться.
Устройства плавного пуска дешевле и компактнее, чем преобразователи частоты. Они используются, когда регулировка скорости и крутящего момента требуется только при запуске.
Частотное управление асинхронными двигателями
Частотные преобразователи используются для управления скоростью и моментом асинхронных двигателей. Принцип работы преобразователей частоты основан на изменении частоты и напряжения переменного тока.
-
Использование частотного преобразователя позволяет:
- Снижение энергопотребления двигателя,.
- Контроль оборотов двигателя (плавный запуск и остановка, регулировка оборотов во время работы); и
- предотвращение перегрузок двигателя и продление срока службы.
-
В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем: ; .
Трехфазный асинхронный двигатель с фазным ротором
Асинхронные двигатели — это асинхронные двигатели, в которых обмотки ротора соединены с контактным кольцом1.
До широкого применения преобразователей частоты асинхронные двигатели средней и большой мощности строились с использованием фазных роторов. Трехфазные асинхронные двигатели с фазными обмотками (ADFR) обычно использовались для приложений с трудными условиями пуска. В качестве крановых двигателей переменного тока или для мобильного оборудования, требующего постоянного регулирования скорости.
Проектирование АДФР
Фаза ротора
Фазный ротор — это, по сути, трехфазная обмотка (аналогичная обмотке статора), которая вставляется в гнездо в сердечнике ротора. Фазные концы этой обмотки ротора обычно соединены звездой, а пусковые концы соединены контактными кольцами, изолированными друг от друга и от вала. Трехфазный пусковой или регулирующий штекер обычно подключается к контактным щеткам. Асинхронные двигатели с фазным приводом имеют лучшие характеристики запуска и управления, но они более сложные, чем двигатели с короткозамкнутым ротором.
Statis ADFR.
Статор короткозамкнутого асинхронного двигателя идентичен статору короткозамкнутого асинхронного двигателя.
Определение выводов вспомогательной обмотки трехфазного АДСР
| Схема подключения обмоток, наименование фаз и выходов | Название розетки | |
|---|---|---|
| Inception | Конец. | |
| Разомкнутая цепь (6 проводников) | ||
| Фаза 1 | K1 | K2 |
| Фаза 2 | L1 | L2 |
| Фаза 3 | M1 | M2 |
| Соединение звездой (количество проводников 3 или 4) | ||
| Фаза 1 | K | |
| Фаза 2 | L | |
| Фаза 3 | M | |
| Starpoint (нулевая точка) | Q | |
| Дельта-соединение (3 воздуховода) | ||
| Первая зацепка | K | |
| Второй выход | L | |
| Третий ведущий | M | |
Наименования выводов обмотки ротора трехфазных машин, ранее разработанных и модернизированных в соответствии с ГОСТ 26772-85
| Схема подключения обмоток, наименование фаз и выходов | Название розетки | |
|---|---|---|
| Соединение звездой (количество проводников 3 или 4) | ||
| Фаза 1 | P1 | |
| Фаза 2 | P2 | |
| Фаза 3 | P3 | |
| Нулевая точка | 0 | |
| Дельта-подключение (количество воздуховодов 3) | ||
| Первая зацепка | P1 | |
| Второй выход | P2 | |
| Третий ведущий | P3 | |







