Ещё для замера скорости скольжения применяют катушку индуктивности. Оптимальным вариантом будет катушка контактора тока постоянной величины. К ней подключают милливольтметр и помещают в окончание роторного вала.
Скольжение асинхронного двигателя
тоже меняется при изменении скорости вращения. Пусковой ток I2п должен быть велик и отставать от э. д. с. на большой угол Ψ2, так как Е2велика, а реактивное сопротивление обмотки х2 обычно в 8—10 раз больше активного r2
При вращении ротора уменьшаются E2sи x2s. Вследствие этого уменьшаются ток I2и угол Ψ2. Указанное обстоятельство очень важно, так как в этом существенная разница между трансформатором и асинхронным двигателем
Статья на тему Работа асинхронного двигателя
Предотвращение вспышек электрической дуги
Первый шаг в безопасности вспышки дуги сводит к минимуму риск возникновения. Это можно сделать, выполнив оценку электрического риска, которая может помочь определить, где находятся самые большие опасности на объекте. IEEE 1584 является хорошим вариантом для большинства объектов и поможет выявить общие проблемы.
Регулярные проверки всего высоковольтного оборудования и всей проводки являются еще одним важным шагом. Если есть какие-либо признаки коррозии, повреждения проводов или другие проблемы, их следует устранить как можно скорее. Это поможет безопасно хранить электрические токи внутри машин и проводов.
Некоторые конкретные области, которые должны быть проверены, включают в себя любые электрические распределительные щиты, щиты управления, панели управления, корпуса розеток и центры управления двигателями.
Для создания необходимого пускового момента однофазный двигатель снабжается дополнительной пусковой обмоткой.
Эта обмотка размещается в оставшейся незаполненной 1/3 пазов.
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение близко к нулю и составляет 2-3%, ввиду того, что n1 почти равняется n2. Нулю оно не может быть равным, потому как в этом случае поле статора не пересекает поле ротора, простыми словами, двигатель не вращается и питающее на него напряжение не подается.
Даже в режиме идеального холостого хода, величина скольжения, выраженная в процентах, не будет равной нулю. S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞
Также существует режим электромагнитного торможения (противовключения ротора), в этом режиме скольжение принимает значение больше единицы, со знаком плюс.
Значение частоты тока в обмотках ротора равно частоте тока сети только в момент пуска. При номинальной нагрузке частота тока будет определяться по формуле:
где f1 – частота тока, подаваемого на обмотки статора, а S — скольжение.
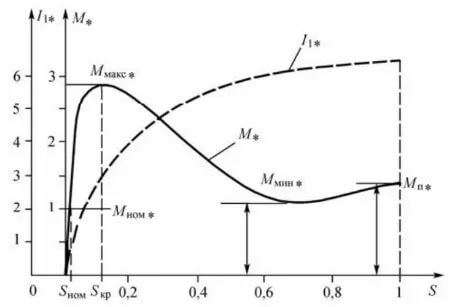
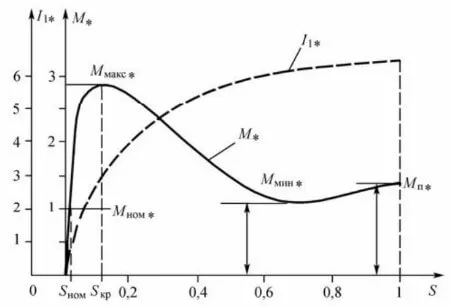
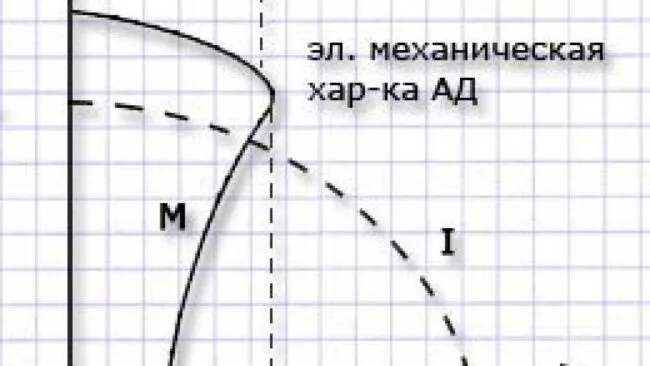
Частота тока ротора прямо пропорциональна его индуктивному сопротивлению. Таким образом, проявляется зависимость тока в роторе от скольжения АД. Вращающий момент электродвигателя зависит от величины S, так как определяется значениями величин магнитного потока, тока, углом сдвига между ЭДС и током ротора.
Поэтому, для детального исследования характеристик АД устанавливается зависимость, изображенная на рисунке выше. Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
При номинальной нагрузке электродвигателя значение скольжения будет в диапазоне 8%-2% (для двигателей малой и средней мощности), номинальное скольжение.
При увеличении нагрузки на валу (момента на валу) будет увеличиваться скольжение, простым языком, магнитное поле ротора будет все сильнее отставать (тормозить) от магнитного поля статора. Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент. Но при этом увеличиваются активные потери в роторе (увеличивается сопротивление), которые уменьшают рост силы тока, поэтому момент увеличивается медленнее, чем скольжение.
При определенной величине скольжения момент достигнет максимального значения, потом начнет снижаться. Величину, при которой момент будет максимальным, называют критической (Sкр).
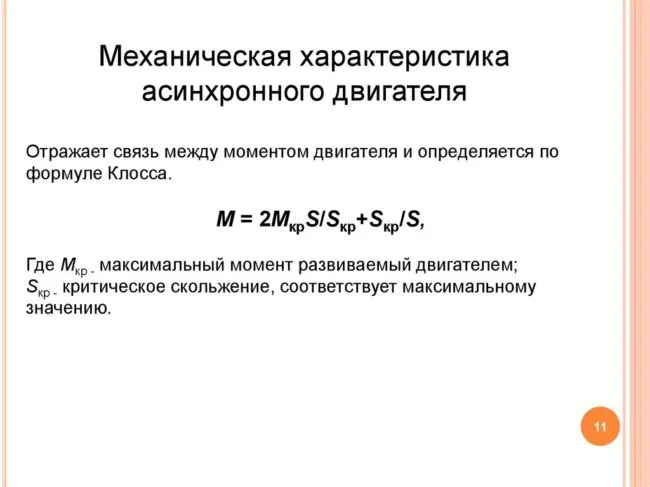
В графической форме механическую характеристику асинхронного электродвигателя можно выразить с помощью формулы Клосса:
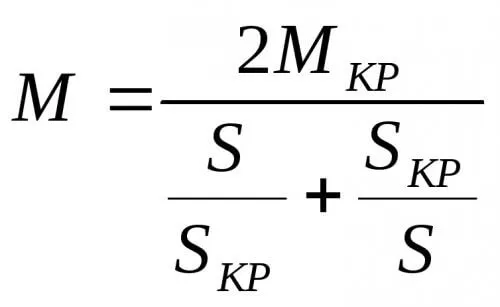
где, Мк — это критический момент, который определяется критическим скольжением электродвигателя.
График строится исходя из характеристик, указанных в паспорте АД. При возникновении вопросов по приводу, в качестве движителя, использующего асинхронный электродвигатель, используется данный график.
Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Также, для измерения величины скольжения всех видов машин подходит способ индуктивной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (там 10-20 тысяч), количество витков должно быть не менее 3000. Катушку с подключенным к ней чувствительным милливольтметром, располагают у конца вала ротора. По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Вот мы и рассмотрели, что собой представляет скольжение асинхронного двигателя и как его определить. Если остались вопросы, задавайте их в комментариях под статьей!
Принцип действия 3-х фазного электродвигателя (асинхронного) достаточно простой. К статорной обмотке подаётся питание. В результате образуется магнитный поток, смещённый на сто двадцать градусов в фазах. Общий поток, при этом, будет вращаться.
Параметры в различных рабочих режимах
Когда электродвигатель обесточен, вращение не происходит, потому что статорное поле не пересекается с роторным полем. В этом случае величина равна двум или трём процентам, т.е. колеблется около нуля.
Если даже параметр холостого хода идеален, процентное значение нулю равняться не будет. Величина может быть и отрицательной, если двигатель функционирует в режиме генератора. В таком режиме (ротор вращается против статора) значение S будет меньше нуля.
При электромагнитном торможении, величина Sпревышает единицу с положительным знаком. Величина токовой частоты в роторных обмотках равняется токовой частоте сети исключительно при пусковом моменте.

Роторная токовая частота пропорциональна сопротивлению индукции, поэтому роторный ток зависим от скольжения асинхронного двигателя.
Момент вращения АД находится в зависимости от значения S, поскольку определяется величинами токового и магнитного потоков, угловым смещением ЭДС и роторным током.
Для подробного изучения параметров электродвигателя определяется зависимость, показанная на графике вверху.
При разных показателях асинхронном двигателе момент вращения можно корректировать при помощи сопротивления, включённого в цепи роторных обмоток.
Если ротор замкнут «накоротко», вращающий момент изменяется либо частотными преобразователями, либо применением двигателей с изменяющимися параметрами.
При нагрузочном номинале двигателя показатель скольжения находится между двумя и восемью процентами. При добавлении нагрузки скольжение ускоряется, потому что роторное поле начнёт больше отставать от статорного поля.
Ускорение неминуемо приведёт к росту роторного тока и момента вращения. Параллельно с этим возрастает сопротивление, что связано с активными роторными потерями, токовые показатели снижаются, в связи с чем, вращение растёт гораздо медленней скольжения.
При определённой скорости скольжения момент вращения достигнет максимума и начнёт замедляться. Максимальное значение является критическим и обозначается Sкр.
В технической документации указываются параметры асинхронного двигателя. По ним строится график, отвечающий на вопросы, связанные с работой асинхронного электрического двигателя, применяемого в качестве привода.
Критический максимум задаёт параметр мгновенного допустимого перегруза двигателя. Когда этот параметр превышается, происходит остановка двигателя (опрокидывание). Это аварийный режим.
Методы измерений
Есть несколько методов произвести замер скорости скольжения двигателя. Когда скорость существенно разнится с синхронным вращением, её определяют тахометром либо тахогенератором, подключённым к валу асинхронного двигателя.
Метод определения стробоскопом с лампой неонового свет применим при скольжении меньше пяти процентов. На двигательном валу мелом рисуют отметку или ставят стробоскоп.
Подают свет от лампы и считают количество оборотов за определённый промежуток времени и, используя формулы, определяют значение.
Ещё для замера скорости скольжения применяют катушку индуктивности. Оптимальным вариантом будет катушка контактора тока постоянной величины. К ней подключают милливольтметр и помещают в окончание роторного вала.
По количеству колебаний стрелки за определённый промежуток времени с помощью формулы вычисляют скорость вращения.
Кроме того, у двигателя с ротором фазы величину скольжения определяют амперметром (магнитоэлектрическим). Прибор подсоединяют к одной из роторных фаз и по количеству стрелочных колебаний, опять-таки применяя формулу, получают результат.
Мы выяснили, что такое скольжение двигателя, способы его определения. Свои вопросы оставляйте в комментариях.
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Скольжение — асинхронный двигатель
Динамические характеристики нагрузки определяют изменение скольжения асинхронных двигателей при данном значении напряжения для различных моментов времени. По заданным значениям скольжения определяются активные и реактивные сопротивления схемы замещения асинхронной нагрузки.
Из (2.21) следует, что с увеличением скольжения асинхронного двигателя, т.е. с уменьшением частоты его вращения за счет увеличения нагрузки, ток ротора возрастает и достигает наибольшего значения при s1, т.е. когда ротор находится в неподвижном состоянии. Одновременно с ростом скольжения увеличивается индуктивное сопротивление ротора X1S — Es, благодаря чему ток ротора по мере роста скольжения увеличивается менее заметно, чем ЭДС.
Перепад скорости в относительных единицах Av аналогичен скольжению асинхронного двигателя, хотя скольжение для двигателей постоянного тока не имеет того физического смысла, как у асинхронных двигателей.
| Схема регулирования частоты вращения с тиристорным регулятором напряжения.| Реверсивная схема регулирования частоты вращения асинхронных двигателей.| Электромеханический каскад.| Электрический каскад. |
В электрическом каскаде ( рис. 3.75) мощность скольжения асинхронного двигателя АД после преобразователя снова подается на двигатель постоянного тока ДПТ, на валу которого находится синхронный генератор СГ. Синхронный генератор отдает электрическую энергию в сеть. В этой схеме мощность скольжения отдается в сеть.
В свою очередь, пульсирующее напряжение увеличивает среднее значение скольжения асинхронных двигателей, что приводит к увеличению времени прохождения ими максимума нагрузки и к дополнительным потерям мощности в двигателях. Увеличение скольжения вызывает снижение числа качаний, а следовательно, и добычи как отдельных установок, так и всего промысла. Кроме того, наличие частых провалов в кривой напряжения приводит к затягиванию и без того тяжелого для сети процесса пуска двигателей скважинных насосных установок.
В асинхронно-синхронном каскаде момент синхронного двигателя Мед определяется мощностью скольжения асинхронного двигателя.
Суть применения указанных машин и аппаратов сводится к тому, что энергия скольжения асинхронного двигателя при регулировании скорости возвращается на вал двигателя или в сеть, так же как это было при одноякорном преобразователе.
| Каскад Шербиуса для дпух-зонного регулирования скорости. |
При переходе каскада через синхронную скорость концы и начала обмотки возбуждения В должны поменяться местами соответственно изменению знака скольжения асинхронного двигателя.
При такого рода расчетах для каждого интервала времени необходимо определять новые значения активных и реактивных сопротивлений нагрузок в соответствии с изменением скольжения асинхронных двигателей.
Метод относительных единиц получил широкое распространение; он применяется в теории электрических машин и теории электропривода, выражение в относительных единицах величин сопротивления электрических машин и трансформаторов, скольжения асинхронных двигателей, напряжения к.
Увеличение напряжений в сети приводит к росту суммарной активной нагрузки в системе за счет роста бытовой нагрузки, мощность которой сильно зависит от напряжения, и за счет снижения скольжения асинхронных двигателей, хотя потери мощности в сети уменьшаются. В связи с увеличением активной нагрузки рост напряжений приводит к снижению частоты, которое при наличии резерва активной мощности может быть предотвращено действием автоматических регуляторов частоты. Снижение напряжений аналогичным образом приводит к снижению активной нагрузки в системе и, следовательно, к повышению частоты. При дефиците активной и реактивной мощностей в послеаварий-ном режиме снижение напряжений до некоторой степени предотвращает резкое снижение частоты.
18.6 Поворотные трансформаторы
Так называют электрические машины переменного тока, предназначенные для преобразования угла поворота q в напряжение, пропорциональное некоторым функциям угла поворота ротора sinq или cosq, а также самому углу q. Их применяют в вычислительной технике для выполнения различных математических операций. С помощью поворотных трансформаторов решают геометрические задачи, связанные с построением треугольников, преобразованием координат, разложением и построением векторов. В системах автоматического регулирования поворотные трансформаторы используют в качестве измерителей расстояния, фиксирующих отклонение системы от некоторого определенного положения.
Конструктивно поворотный трансформатор представляет собой асинхронную машину малой мощности. На статоре ее перпендикулярно размещены две обмотки: C1-C2 и С3-С4. Первая получила название главной, а вторая – квадратурной. Обмотки статора выполняются одинаковыми, т.е. с одинаковым числом витков. На роторе может быть одна обмотка, но чаще их бывает две. На рис. 5.18.6.1. приведены схемы включения синусного, косинусного и синусно-косинусного поворотных трансформаторов.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Скольжение асинхронного двигателя —>
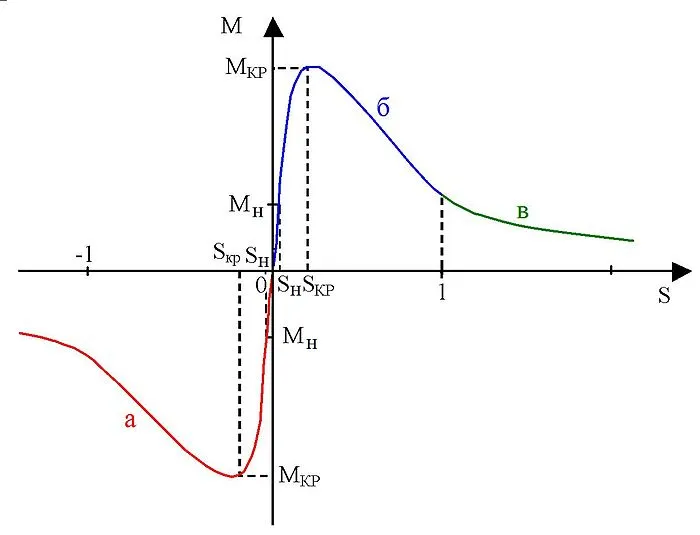
Механическая характеристика асинхронной машины: а — режим рекуперации энергии в сеть (генераторный режим), б — двигательный режим, в — режим противовключения (режим электромагнитного тормоза).
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
где n — скорость вращения ротора асинхронного двигателя, об/мин
где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Критическое скольжение
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
- Хомяков Н. М., Денисов В. В., Панов В. А. Электротехника и электрооборудование судов. — Ленинград: Издательство «Судостроение», 1971. — 368 с.
В статье есть список источников, но не хватает сносок.Без сносок сложно определить, из какого источника взято каждое отдельное утверждение. Вы можете улучшить статью, проставив сноски на источники, подтверждающие информацию. Сведения без сносок могут быть удалены.
> > This page is based on a Wikipedia article written by contributors (read/edit).
Text is available under the CC BY-SA 4.0 license; additional terms may apply.
Images, videos and audio are available under their respective licenses.
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным преимуществом трехфазной системы по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме «звезда» или «треугольник» в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы. Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль).
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А. Полная потребляемая мощность:
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Управление асинхронным двигателем
-
Способы подключения асинхронного электродвигателя к сети питания:
- подключение от устройства плавного пуска
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Нереверсивная схема
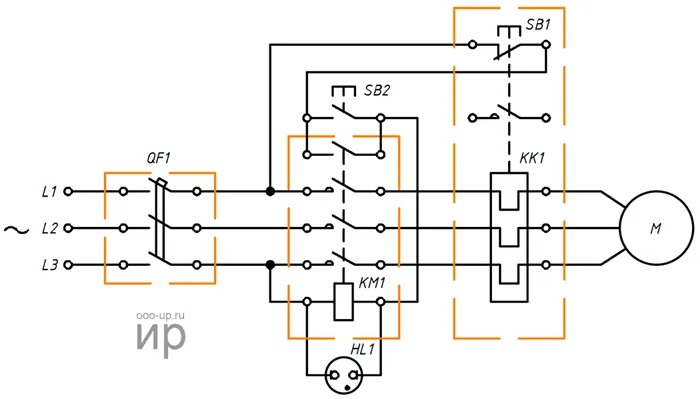
Нереверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитный пускатель
L1, L2, L3 — контакты для подключения к сети трехфазного переменного тока, QF1 — автоматический выключатель, SB1 — кнопка остановки, SB2 — кнопка пуска, KM1 — магнитный пускатель, KK1 — тепловое реле, HL1 — сигнальная лампа, M — трехфазный асинхронный двигатель
Реверсивная схема
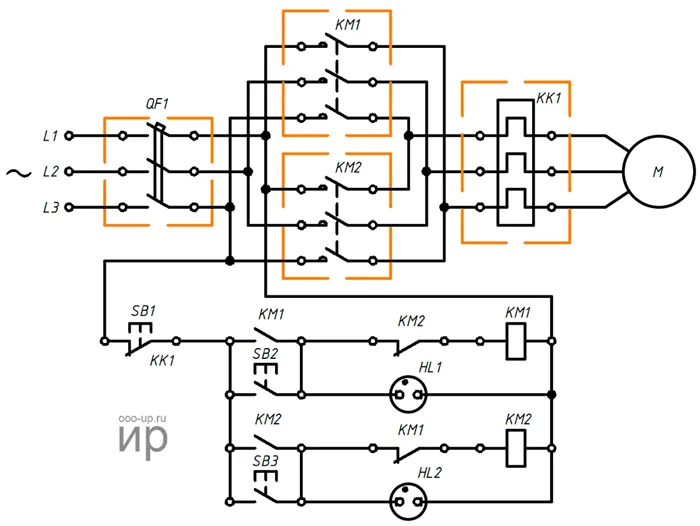
Реверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитные пускатели
L1, L2, L3 — контакты для подключения к сети трехфазного переменного тока, QF1 — автоматический выключатель, KM1, KM2 — магнитные пускатели, KK1 — тепловое реле, M — трехфазный асинхронный двигатель, SB1 — кнопка остановки, SB2 — кнопка пуска «вперед», SB3 — кнопка пуска «назад» (реверс), HL1, HL2 — сигнальные лампы
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
-
Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
-
В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем: ; .
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Трехфазный асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором
— асинхронный двигатель, у которого обмотка ротора присоединена к контактным кольцам 1.
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.

Фазный ротор
Режим холостого хода |
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n 1 > и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода
, при котором n = n 1 > , что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы асинхронного двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При s = 0 поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора







