Программа управления выполняет полный поворот шаг за шагом; после секундной паузы он повторяется бесконечно. Можно проверить скорость вращения, направление и угол поворота. Пошаговое руководство (версия 2)
Как работает шаговый электродвигатель?
Почти все бытовые приборы требуют для своей работы специальных механизмов движения. Мы предлагаем вам подумать о его стабилизированном времени, его конструкции, принципах работы и что-нибудь с графиком соединений.
Шаговый двигатель — это электрический двигатель, предназначенный для преобразования электроэнергии в механическую энергию. Конструктивно он состоит из старой обертки и магнитного или магнитно-жесткого курсора. Отличительной особенностью шаговых двигателей является выраженное вращение, при котором фиксированное количество импульсов соответствует определенному количеству шагов. Такие устройства в основном используются в ЧПУ, робототехнике, устройствах хранения и считывания информации.
Шаговые двигатели не вращаются постоянно, а имеют ступеньки, которые и дали название устройству. Все эти шаги являются лишь частью его полной революции. Количество шагов, необходимых для полного вращения вала, зависит от схемы подключения, марки двигателя и метода управления.
Преимущества и недостатки пошаговых — шаговых двигателей
Преимущества пошаговой эксплуатации двигателя заключаются в следующем
- В рулевых двигателях угол поворота соответствует количеству подаваемых электрических сигналов, но полный крутящий момент и страховка сохраняются и после прекращения вращения.
- Точное размещение — обеспечивает 3-5% заданного шага.
- Быстрый старт, реверс, обеспечивает отношение
- В отличие от коллекторных двигателей, здесь отсутствуют фрикционные соединения для силового насоса, поэтому они характеризуются высокой надежностью.
- Шаг /.
- Может создавать низкие скорости нагрузки при прямом движении без необходимости использования зубчатых передач.
- Относительно низкая стоимость по сравнению с аналогичным сервисом.
- Обеспечивает широкий диапазон регулирования скорости вращения оси путем изменения частоты электрических импульсов.
К недостаткам пошагового использования относятся
- Возможна регулировка и пробуксовка рулевого механизма, а также
- Отсутствие обратной связи, что может привести к потере контроля, и
- Количество потребляемой электроэнергии не зависит от наличия или отсутствия нагрузки, ..,
- Трудности проверки из-за характера схемы
Устройство и принцип работы

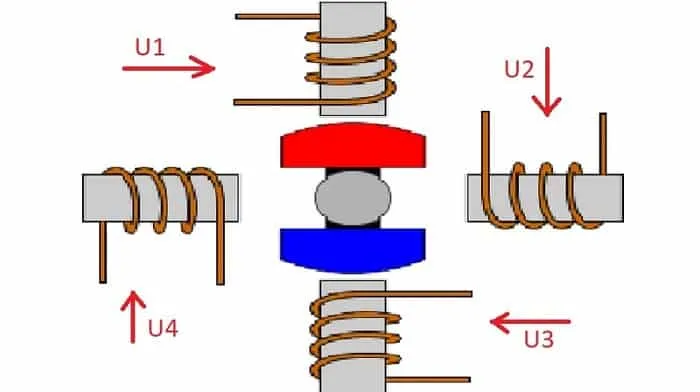
Рис. 1. рабочий двигатель стимулированного движения
На рис. 1 показаны четыре обмотки, связанные со статором двигателя, расположенные таким образом, чтобы образовать угол 90º. Для машины характерен размер шага 90º.
Когда напряжение U1 подается на первую обмотку, курсор перемещается на те же 90º. Поскольку U2, U3 и U4 поочередно подаются на соответствующие обмотки, вал продолжает вращаться до завершения полного цикла. Στη συνέχεια, ο κύκλος επαναλαμβάνεται και πάλι. Για την αλλαγή της κατεύθυνσης περιστροφής αρκεί να αλλάξει η ακολουθία των παλμών που τροφοδοτούνται στις αντίστοιχες περιελίξεις.
Типы шаговых двигателей
Как шаг, на который смещается вал, так и крутящий момент, приложенный для его перемещения, важны для обеспечения различных рабочих параметров. Изменения этих параметров достигаются конструкцией самого ротора, способом подключения и конструкцией обмоток.
В зависимости от конструкции ротора
Роторный элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому их конструкция и технические характеристики напрямую определяют режимы работы и параметры вращения шагового блока. Для определения фактического типа шагового двигателя необходимо вращать вал при выключенном питании. Если ощущается сопротивление, это указывает на наличие магнита, в противном случае конструкция не имеет магнитного сопротивления.
Реактивность.
Реактивные шаговые двигатели не имеют магнита в роторе, а изготавливаются из магнитомягкого сплава, который, как правило, принимается из пластин для уменьшения индуктивных потерь. Поперечное сечение напоминает шестеренку с зубьями. Полюса обмотки статора запитаны от противоположных пар, создавая магнитную силу, которая перемещает ротор. Ротор движется под действием переменного тока, протекающего по парам обмоток.
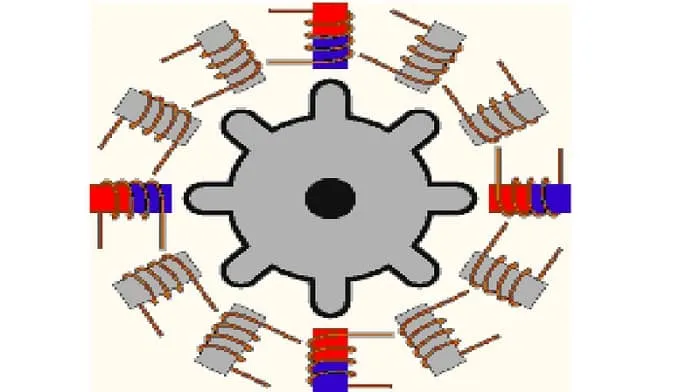
С переменным магнитосопротивлением.
Важным преимуществом данной конструкции шагового привода является отсутствие момента срыва, создаваемого полем относительно клапана. Фактически, это то же самое, что и в синхронном двигателе, где ротор вращается в ответ на поле статора. Недостатком является снижение значений крутящего момента. Шаг реактивных двигателей варьируется от 5° до 15°.
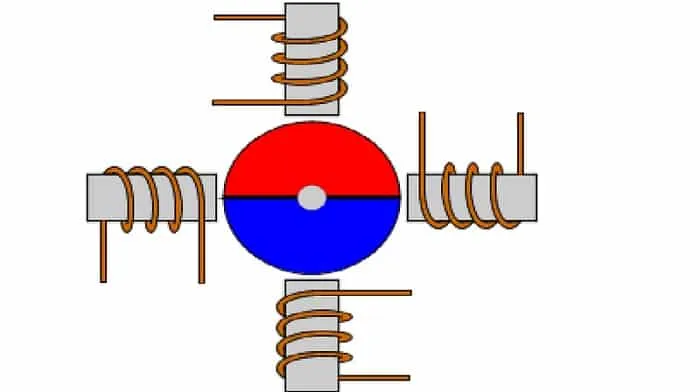
С постоянным магнитом
В этом случае подвижные элементы шагового двигателя собираются из постоянных магнитов, которые могут иметь два или более полюсов. Вращение ротора обеспечивается притяжением или отталкиванием полюсов под действием электрического поля при подаче напряжения на соответствующую обмотку. В данной конструкции угловой шаг составляет 45-90°.
С постоянным магнитом
Гибрид.
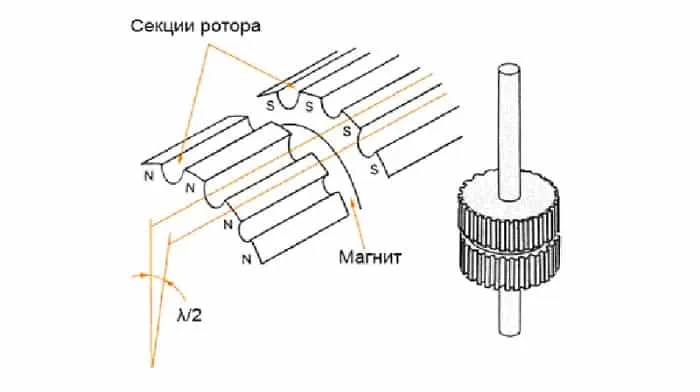
Сочетая в себе лучшие качества двух предыдущих моделей, устройство имеет меньший угол наклона и шаг. Его ротор представляет собой цилиндрический постоянный магнит, намагниченный вдоль продольной оси. Структурно он выглядит как два круглых полюса, а на его поверхности ротор имеет зубцы из магнитно-мягкого материала. Это решение обеспечивает превосходную удерживающую силу и крутящий момент.
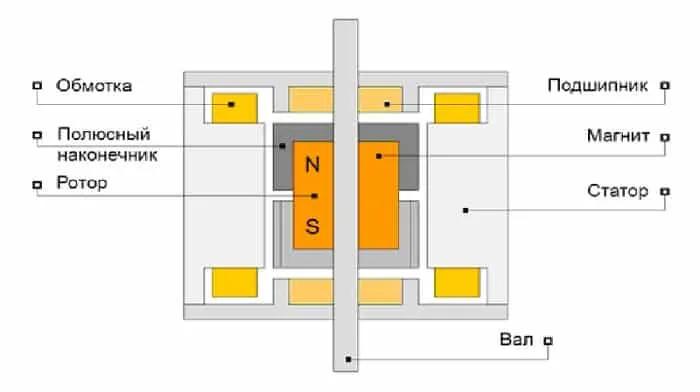
Конструкция гибридного шагового двигателя
Преимуществами гибридных шаговых двигателей являются их высокая точность, плавность и скорость перемещения с малым шагом 0,9-5°. Они используются в высококлассных станках с ЧПУ, компьютерных и офисных устройствах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
В качестве примера рассмотрим гибридный вариант SPD для позиционирования вала с 200 шагами. Таким образом, каждый цилиндр имеет 50 зубцов, один из которых положительный, а другой отрицательный. В этом случае каждый положительный зуб находится напротив паза в отрицательном цилиндре и наоборот. Структурно это выглядит следующим образом.
Полный шаг — в этом режиме фазы переключаются одновременно. Это означает, что оба возбуждаются одновременно. Поэтому при параллельном или последовательном соединении обмоток обеспечивается максимальный крутящий момент и вырабатывается максимальное напряжение или ток.
Содержание / Contents
🌼 Полезное и проверенное железо, можно принимать
проверены в редакционной лаборатории или читателем.
Следует сразу оговориться, что все написанное ниже является лишь моим личным заключением, и я не претендую на абсолютную истину. Истина рождается из разногласий, поэтому, если читатель не согласен со мной, давайте обсудим это.
Задачу создания станка обычно разделяют на три подзадачи: проектирование, электроника и программное обеспечение. Поэтому я должен написать еще три статьи. Поскольку это журнал по практической электронике, я начну с электроники и немного инженерии!
↑ Привод
Фрезерный станок должен двигаться в трех направлениях — XYZ, то есть три двигателя — три двигателя, которые передают вращение вала двигателя в линейное движение. О передаче… Для фрезерных станков с боковыми усилиями для резки материала предпочтительно не использовать ременные двигатели, которые очень популярны в 3D-принтерах. Используйте шестерни с винтовыми гайками. Самыми экономичными инструментами являются обычные стальные винты и неподъемные, предпочтительно медные гайки. Точнее, винты с трапециевидными винтами и капроновыми гайками. Лучший (и, к сожалению, самый дорогой) ШВП или ШВП. Подробнее об этом позже… Каждая передача имеет свой собственный элемент — шаг. То есть, насколько линейно перемещается фреза вдоль оси за один оборот двигателя (например, 4 мм).
В качестве приводного двигателя был выбран шаговый двигатель (VFD). Что такое шаговый двигатель? Существуют двигатели переменного тока, двигатели постоянного тока, коммутационные двигатели, бескоммутационные двигатели и так называемые «шаговые двигатели». Во всех случаях необходимо обеспечить точность расположения. 0,01 мм. как это сделать? Если двигатель имеет прямой привод (вал двигателя напрямую соединен с гребным винтом), то для достижения такой точности двигатель должен быть повернут на определенный угол. В данном случае, при шаге передачи 4 мм и желаемой точности перемещения 0,01 мм, это … Только 1/400 часть оборота, т.е. 360/400 = 0,9 градуса. Глупости, купите «нормальный» двигатель…
С «обычными» двигателями нет возможности сделать это без обратной связи. Не вдаваясь в подробности, схема управления двигателем должна «знать», на какой угол повернулся вал. Конечно, можно использовать коробку передач. Скорость будет снижена, но нет никакой гарантии или обратной связи. Датчик угла поворота рулевого колеса должен быть установлен на валу. Это решение надежно, но дорого.
Альтернативой является шаговый двигатель (прочитайте, как он работает). Можно предположить, что вал поворачивается в некоторой степени по каждой «команде». Обычно 1,8 или 0,9 градусов (обычно более 5%). Это все, что требуется. Недостатком этого решения является то, что при высоких нагрузках двигатель может пропустить команду («шаг») и полностью остановиться. Эту проблему можно решить, установив известный мощный двигатель. Большинство любительских станков основаны на шаговых двигателях.
↑ Выбираем шаговый двигатель
Двигатель имеет две обмотки, минимальный ток, минимальную индуктивность и максимальный крутящий момент. Одним словом, это самые мощные и экономичные двигатели.
Противоречивые требования. Низкий ток означает высокое сопротивление, что означает большее количество обмоток двигателя, что означает высокую индуктивность. А высокий крутящий момент означает высокий ток и большое количество оборотов. Выберите больший ток и меньшую индуктивность. Крутящий момент также должен быть выбран в зависимости от нагрузки, которая будет выбрана позже.
Характеристики некоторых двигателей приведены в таблице.
Для небольших станков с рабочим пространством 300 x 300 x 100 мм и легких фрезерных станков идеально подходят двигатели с крутящим моментом 0,3 Нм и более. Оптимальным является ток от 1,5 до 2,5 ампер, и для этого подходит модель FL42STH38-1684.
Низкопороговые транзисторы помогают создавать драйверы с более высокими параметрами. Транзисторы, которые могут быть использованы в драйверах, имеют следующие преимущества
Драйвер шагового двигателя своими руками
Информация исходит от зарубежного производителя радиочастот, поэтому в ней приведены два варианта простейшей системы привода шагового двигателя (ссылка на оригинал в конце статьи).
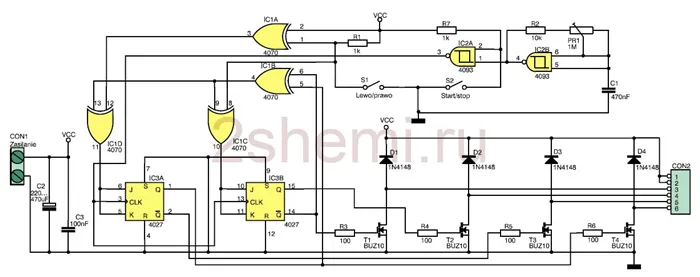
Схемы привода шагового двигателя не содержат дорогостоящих компонентов или программируемых контроллеров. Эта функция может быть детально отрегулирована с помощью потенциометра PR1. Направление вращения двигателя изменяется. Катушка шагового двигателя приводится в действие четырьмя МОП-транзисторами T1-T4. Использование в блоке транзисторов BUZ10 с высоким выходом позволяет подключать даже двигатели с очень высоким током.
Особенности схемы и детали
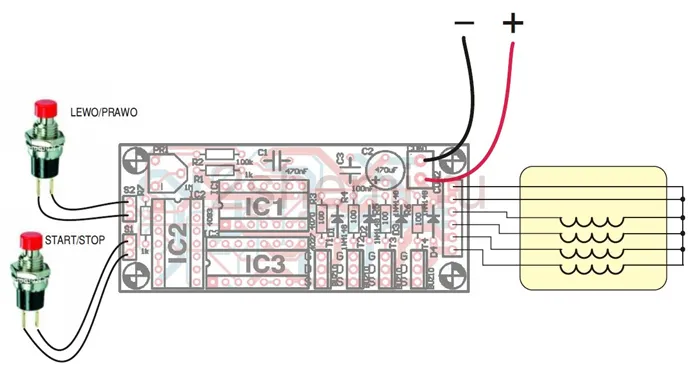
- Управление 4-фазным шаговым двигателем
- Неограниченное регулирование скорости во всем диапазоне скоростей
- Реверсирование двигателя
- Дополнительное отключение двигателя
- Источник питания 12 В постоянного тока
Детали IC1: 4070, IC2: 4093, IC3: 4027, T1-T4: BUZ10, BUZ11
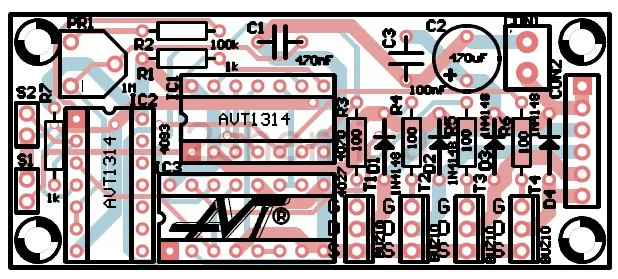
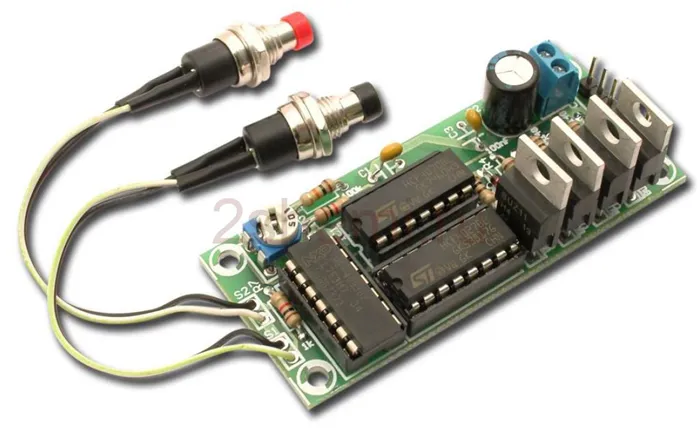
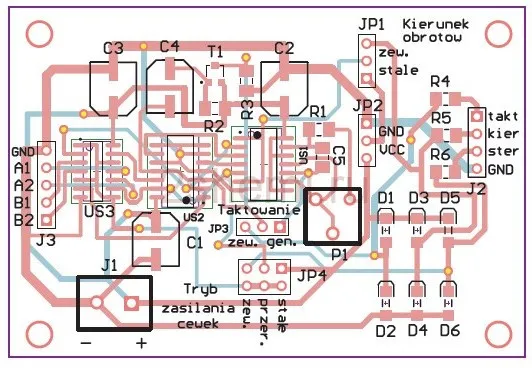
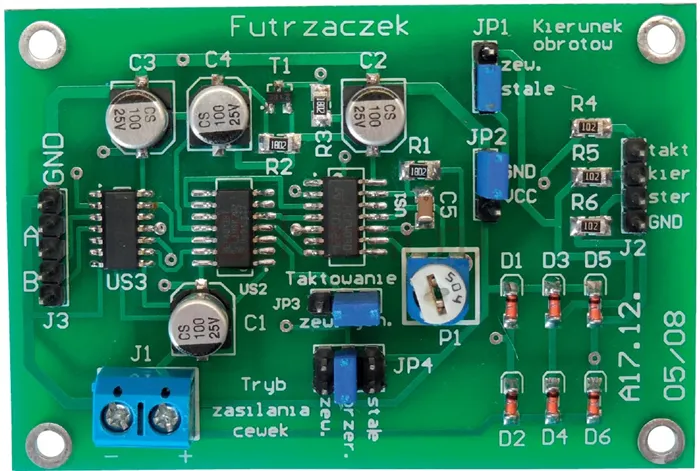
Блок привода шагового двигателя установлен на печатной плате, показанной на рисунке. Как правило, она начинается со сварки резисторов и интегральных схемных плат и заканчивается электролитическими конденсаторами и мощными транзисторами.
Собранное из проверенных компонентов, устройство не требует настройки и запускается сразу после подачи питания. Используя значения элементов, указанные на диаграмме, двигатель 5,25 дюйма может работать и выполнять изменения скорости в диапазоне от 40 об/мин до 5 об/мин.
Биполярный контроллер шаговых двигателей
Эта схема представляет собой более дешевую и простую в сборке альтернативу имеющимся микропроцессорным контроллерам биполярных шаговых двигателей. Рекомендуется для применения в тех случаях, когда точность регулирования менее важна, чем цена и надежность.
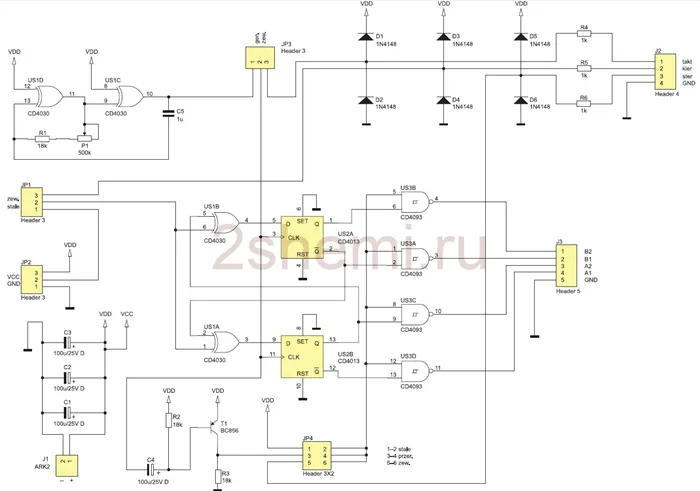
Основную схему можно разделить на следующие секции
- Последовательный чип, который генерирует битовые строки.
- Генератор локального тактового сигнала, генератор
- Схема управления питанием катушки,.
- выходные изоляторы Н-моста, и
- Схема защиты входного управления.
На контроллер должно подаваться постоянное напряжение, хорошо отфильтрованное и, желательно, стабилизированное.
Вот немного больше о Н-мостах, которые функционируют в этом руководстве. Все возможные логические состояния (00, 01, 10, 11) должны приниматься на вход без риска повреждения. В некоторых мостовых конфигурациях, выполненных с использованием дискретных компонентов, невозможно одновременное переключение двух входов. Это, конечно, невозможно с данным контроллером. Мосты, выполненные в виде интегральных схем (например, L293, L298), устойчивы к этому.

Наконец, можно найти третий вариант контроллера на чипе STK672-440 со всеми необходимыми защитами и функциями. Смотрите здесь.







