Если драйвер подключен по схеме, в которой контакты PUL +, DIR + и ENA + подключены к контроллеру 5 В (левое изображение выше), необходимо изменить логический уровень, указанный в функции digitalWrite () в скетче.
Драйвер шагового двигателя. Тестируем микросхему L9110
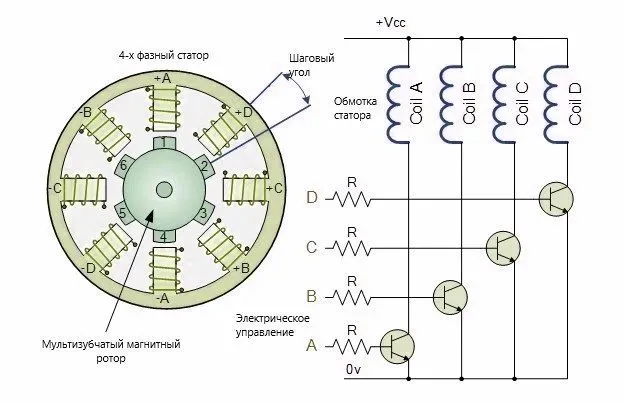
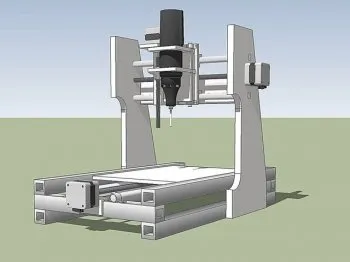
Сегодня доступен широкий спектр станков с программным управлением, которые становятся все более популярными. Это лазерные резаки, фрезерные станки и гравировальные станки. А также 3D-принтеры. Все эти машины имеют одну общую черту: шаговые двигатели.
Для работы этого двигателя требуется отвертка.
Принцип работы двигателя не является темой данной статьи. Только руководство будет смотреть. Все, что вам нужно знать в этом контексте, это управляющие сигналы, которые необходимо создать для управления шаговым двигателем. Это будут наиболее распространенные квадратурные импульсы.
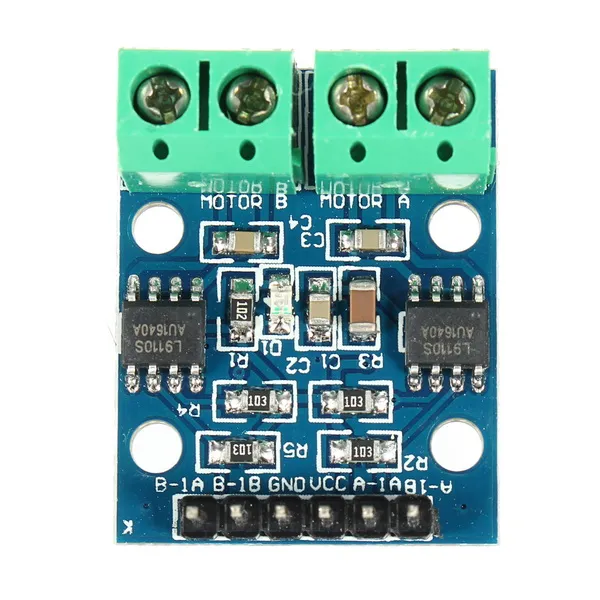
Существует несколько решений для водителей, предлагаемых различными компаниями. В этой статье описывается наиболее доступное решение для драйвера L9110 и соответствующего HG7881. Это решение часто используется с Arduino
А как насчет практических решений?
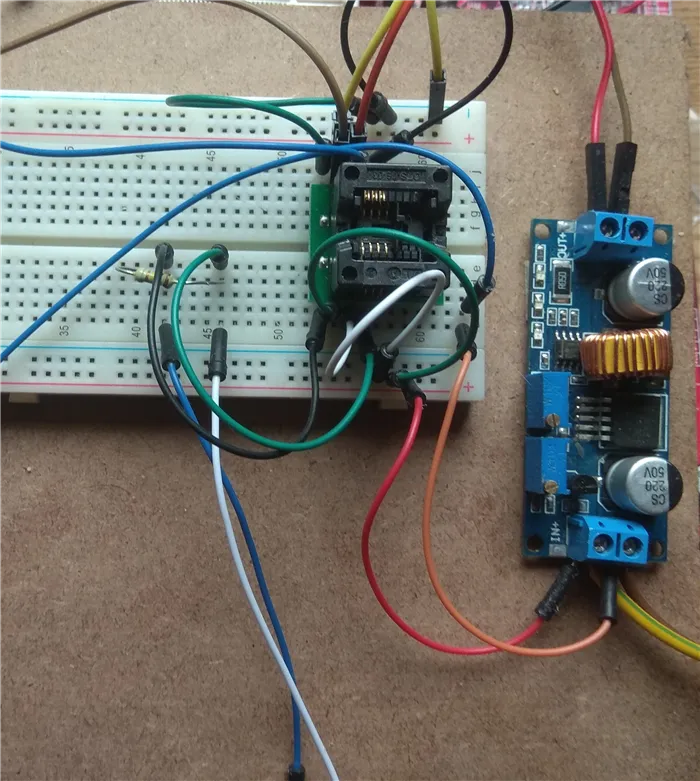
Без промедления мы создали плату, создали тестовую программу и запустили ее… Первое, что я заметил при работе с устройством, это то, что микросхема драйвера сильно нагревалась. Внимание! В движении. Без нагрузки. Что это за схема? Возможно, в моем чипе есть ошибка?
Мне пришла в голову идея поближе познакомиться с этим устройством. И не один, а целая куча. Выполнено. К счастью, у меня была плата SO-8 и плата для моделирования. Теперь контроллер на базе STM32.
Был собран испытательный стенд и проведены измерения.
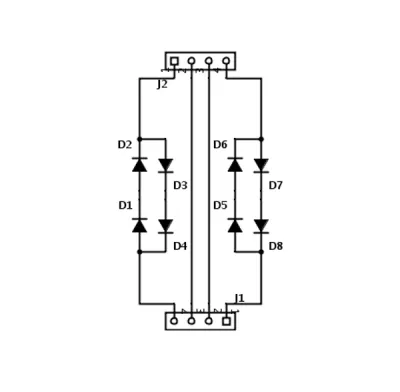
Кстати, интегральная схема имела логику «исключающее-исключающее», за исключением источника питания. Это описано в техническом паспорте.
Поскольку я изучаю влияние нагрева микросхемы, лучше брать фактические напряжения, а не логические единицы и нули.
Результаты измерений приведены в таблице.
Рассмотрим строки 2 и 3. Что вы видите здесь?
- Падение напряжения на выходном транзисторе с зарядом составляет около 1,5 вольт, что соответствует 0,5 ватта на канал при силе тока 0,33 ампера.
- Потребляемая мощность в режиме ожидания составляет 0,05 А, что соответствует 0,6 Вт на канал при напряжении 12 В.
Конечно, интенсивный нагрев является недостатком. Но, возможно, чип работает хорошо? Недавно появившаяся четырехпроводная консоль осциллографа была очень полезна. Я не ожидал, что в ближайшее время мне понадобятся все четыре луча. Для проверки я создал простую программу на stm32, которую давно использую в различных проектах. Программа просто производит два прямоугольных сигнала с разницей частот в три раза.
Лучше один раз посмотреть, чем много раз прочитать, поэтому анализ управляющего сигнала выглядит следующим образом.

Ничего сложного. Простой прямоугольный импульс был сдвинут на трехкратную разницу частот.
Верхняя часть экрана — это входной сигнал, а нижняя — выходной.
Если значения сигнала на входах различны, выходной сигнал очень четкий, и вы можете сразу увидеть, что он был отрегулирован с резкими краями без задержки.
Если сигнал на входе одинаковый, края ровные. Просмотрев документацию, я не нашел ничего, что бы указывало на такое поведение. Возможно, установлена слишком высокая частота входного сигнала. В техническом паспорте нет ограничений. Я уже знал, что этот драйвер имеет почти 100-процентный аналог HG7881, поэтому заглянул в его документацию.
Это пролило больше света на эту загадочную ситуацию. Оказалось, что логика водителя несколько шире. Две единицы на входе — торможение (т.е. оба сигнала должны быть низкими на выходе), а два нуля на входе — «висячие» контакты.休憩。
Таким образом, два нуля на входе должны «приостановить» выходы. Тогда поведение разрядного конденсатора вполне предсказуемо. Однако два нуля на входах — должны быть надежным нулем на выходах. В действительности же это не так.
Я могу приписать этот недостаток «китайскому производителю». Однако я протестировал чип, честно отсоединенный от платы arduino. И не только чип. Из нескольких досок. Таким образом, вероятность возникновения дефекта значительно снижается.
Здесь необходимо отметить один важный момент: драйвер шагового двигателя очень малоинтеллектуален. Эта функция возлагается на контроллер 3D-принтера. Фактически, драйвер выполняет только две основные функции: упорядочивание фаз и управление фазным током.
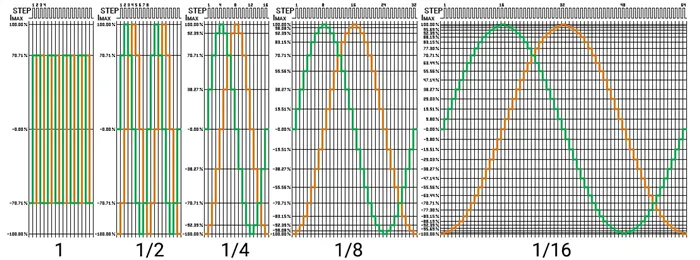
Микрошаг:
Большинство драйверов позволяют разделить полный шаг двигателя на несколько микрошагов. Выбор микрошага устанавливается в соответствии с таблицей в руководстве по эксплуатации драйвера. Таблица определяет количество микрошагов на полный шаг «Microstep» (1/2/4/8/16/32/. ) и/или количество ударов на полный оборот вала «Pulse/rev» (200/400/800/1600/3200/6400/. ).
Если в режиме 1 микрошага полного шага ротору двигателя требуется 200 циклов для полного оборота, то в режиме 4 микрошага полного шага требуется 800 циклов.
Чем больше микрошагов в полном шаге, тем точнее и плавнее вращается ротор шагового двигателя, но для поддержания той же скорости необходимо увеличить тактовую частоту.
Ограничение тока фазы:
Большинство драйверов позволяют ограничить фазный ток (ток, протекающий через обмотки двигателя). Фазный ток выбирается в соответствии с таблицей в руководстве водителя. Таблица определяет фактический ток «Current» и/или пиковый ток «PK Current». Чем выше ток, тем выше выходной крутящий момент (мощность двигателя).
Слишком высокий ток приведет к перегреву двигателя и может вызвать его повреждение, а слишком низкий ток может вызвать пропуск шагов или нестабильное вращение ротора.
В некоторых драйверах ограничение тока осуществляется поворотом потенциометра.
Силовые выводы драйвера:
Силовые клеммы используются для подачи питания на шаговый двигатель и подключения его обмоток.
- Входы «VCC», «GND» / «+V», «GND» / «AC+», «AC-» используются для подачи напряжения на шаговый двигатель.
- Выводы «A+» и «A-» используются для подключения первой обмотки шагового двигателя.
- Выходы ‘B+’ и ‘B-‘ предназначены для подключения второй обмотки шагового двигателя.
Подключение обмоток двигателя к драйверу зависит от количества выводов двигателя.
Драйверы DM860H, DM556, TB6600 позволяют использовать только биполярные двигатели. Двигатели с 4 проводами подключаются в соответствии с рисунком A. Двигатели с 6 проводами подключаются в соответствии с рисунком B или C. Двигатели с 8 проводами подключаются в соответствии с рисунком D или E.
Не подключайте и не отключайте обмотки двигателя при включенном приводе!
Драйвер DRV имеет три выхода, а именно M0, M1 и M2, для микрошаговой регулировки. Установив соответствующие логические уровни для этих выходов, вы можете выбрать режим микрошага.
Драйвер шагового двигателя DRV8825
Драйвер шагового двигателя DRV8825
| 最大。 | 1,5 A (2,2 A с охлаждением) |
| Шаговый двигатель | NEMA 14 и 17 (до 1,5 А) |
| 電源 | 8-45В |
Краткие технические характеристики
Драйвер шагового двигателя DRV8825 — это еще один небольшой драйвер ЧПУ, который очень популярен в небольших приложениях с ЧПУ.
DRV8825 также является интегрированной схемой ступенчатого регулирования, производимой компанией TexasInstruments. Компания Pololu Robotics впервые установила его на пластырь.
Всегда можно приобрести оригинальный PololuDRV8825, но он стоит примерно в пять раз дороже при почти незначительном приросте производительности.
Этот драйвер можно охарактеризовать как обновление драйвера A4988.
Он может выдерживать ток 1,5 А без охлаждения и 2,2 А с принудительным воздушным охлаждением и теплоотводом. Это усовершенствование по сравнению с A4988 на 1 А без охлаждения.
Этот контроллер двигателя ЧПУ может очень хорошо управлять двигателями NEMA 17 1.5A, и, очевидно, даже меньшими шаговыми двигателями.
A4988 может принимать до 1/16 микрошага, в то время как DRV8825 может принимать до 1/32 микрошага, что делает работу двигателя более плавной.
DRV8825 поставляется с алюминиевым теплоотводом.

Руководство по кардиостимулятору DRV8825
DRV8825 заменяет направляющую A4988 на системах ЧПУ. Это связано с тем, что он имеет одинаковый размер, расположение терминала и интерфейс.
Управление током драйвера DRV8825 очень похоже на управление током A4988, за исключением настроек потенциометра.
Напряжение питания DRV8825 находится в диапазоне от 8 до 45 В, что выше верхнего предела напряжения драйвера A4988, равного 35 В.
В целом, это усовершенствованный драйвер кардиостимулятора A4988 и, как ни странно, стоит почти столько же. Если нет конкретных причин для покупки A4988, используйте руководство по шаговому двигателю DRV8825.
Драйвер шагового двигателя DM542T

Руководство по шаговому двигателю DM542T
| 最大。 | 4.2 A |
| Шаговый двигатель | NEMA 14, 17, 23, 24 (макс. 4,2 A) |
| 電源 | 8-45В |
Краткие технические характеристики
DM542T — мой личный фаворит, и именно его я чаще всего использую в приложениях DIYCNC.
Этот драйвер шагового двигателя может управлять почти всеми двигателями NEMA 17 и NEMA 23, за исключением, возможно, двигателей NEMA 23 с высоким крутящим моментом 4,2A.
Это руководство по шаговому двигателю подходит почти для всех других шаговых двигателей в ЧПУ. Я говорю это потому, что NEMA 34 очень редко встречается в ЧПУ.
Это делает данное руководство идеальным практически для всех проектов CNCDIY на основе GRBL, включая большие рамы 8’x4′.
Если вам необходимо выбрать контроллер на базе GRBL, который нужен для вашего ЧПУ, вам поможет это руководство, которое я создал — контроллер GRBLCNC для энтузиастов.
Этот контроллер двигателя известен своей высокой надежностью и длительным сроком службы. Благодаря чипу DM542T этот продукт отличается высоким качеством. Теплоотдача и охлаждение этого двигателя превосходны. Он очень тихо работает и не перегружается даже при 4 А.
Одной из выдающихся особенностей этого двигателя является его превосходная и плавная система запуска. Шаговые двигатели без этого потребляют много энергии при первом запуске.
Это приводит к перегрузке двигателя и значительно сокращает срок его службы.
DM542T смягчает эту проблему, регулируя ток и постепенно увеличивая крутящий момент.
Антирезонансная функция DM542T работает так, как заявлено, предотвращая вибрации и шум в центральной области (на усилителе).
Кроме того, шаговые двигатели имеют тенденцию нагреваться, когда не вращаются при подключении к источнику питания.
DM542T имеет функцию снижения тока холостого хода, при которой ток снижается до половины значения скорости.
DM542T обеспечивает микрошаг с точностью до 1/128. Однако именно микрошаговое управление делает его действительно великолепным.
С помощью DIP-переключателей шагового двигателя можно легко регулировать количество микросфер до 15 предустановленных функций (от 1 / 2, 1 / 4, … и т.д. до 1/128) микросфер можно легко регулировать.
Направляющая DM542T с синими DIP-переключателями
В отличие от предыдущих руководств по шаговым двигателям в этом списке, здесь нет необходимости вращать потенциометр для регулировки тока.
Как и в случае с микрошаговым драйвером, DIP-переключатель можно использовать для регулировки тока из восьми выбираемых пиков тока (1,00 A, 1,46 A, 1,91 A, 2,37 A, 2,84 A, 3, 31 A, 3,76 A и 4,20 A).
Драйвер шагового двигателя TB6600

Драйвер TB6600.
| 最大。 | 4А |
| Шаговый двигатель | NEMA 14, 17, 23 (макс. 4A) |
| 電源 | 9-42B |
Краткие технические характеристики
Драйвер TB6600 — это очень популярный драйвер, обычно используемый для питания двигателей NEMA 17 и NEMA 23.
Интегральная схема кардиостимулятора в этом драйвере произведена компанией Toshiba. Если быть точным, используемый шаговый двигатель — TB67S109A, а не TB6600.
Однако его функциональность аналогична TB6600.
Имеется семь предустановленных выходных токов (0,5 A / 1,0 A / 1,5 A / 2,0 A / 2,5 A / 2,8 A / 3,0 A / 3,5 A), которыми можно управлять с помощью шестиразрядного DIP-переключателя драйвера.
Максимальный выходной ток, который можно регулировать с помощью DIP-переключателя, составляет 3,5 А, что ниже теоретического максимального тока в 4 А.
На мой взгляд, это руководство может хорошо работать, если требование составляет до 3А. Кроме того, здесь шумно и жарко.
Как и другие направляющие шагового двигателя ЧПУ этой серии, он имеет встроенную защиту от перенапряжения и температуры.
Этот шаговый двигатель имеет пять предустановленных микроволновых функций (1/1, 1/2, 1/4, 1/8, 1/16 и 1/32), которыми можно управлять с помощью DIP-переключателей.
Направляющая шагового двигателя TB6600 с DIP-переключателями на боковой стороне.
Напряжение питания, доступное для работы этого шагового двигателя, составляет 9-42 В, рекомендуемое напряжение — 12-30 В.
На всякий случай лучше не превышать 30 вольт.
Большинство пользователей используют этот шаговый двигатель при напряжении 24 В, так как он имеет достаточную скорость и крутящий момент при таком напряжении питания.
По словам производителя, этот шаговый двигатель идеально подходит для достижения крутящего момента 255 унций на дюйм или меньше.
Самое интересное в этом шаговом двигателе то, что он обеспечивает бесшумный ток не менее 3 А при почти вдвое меньшей цене DM542T.
Помните, что при использовании этого контроллера двигателя или DM542T, вам потребуется три таких контроллера для управления 3-осевым ЧПУ.
Если у вас ограниченный бюджет, а потребляемая мощность шагового двигателя не превышает 3 А, мы рекомендуем приобрести этот прибор. В противном случае мы рекомендуем выбрать DM542T или DM556, расширенный аналог DM542T.







