Дальнейшие исследования позволили ученым ответить на многие вопросы о том, как оптимизировать оптимальную мощность, производительность и размеры.
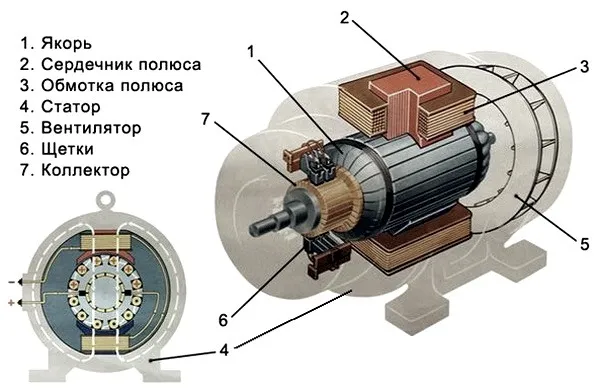
Электродвигатели постоянного тока. Устройство и работа. Виды
Двигатели постоянного тока используются гораздо реже, чем двигатели переменного тока. В бытовом применении двигатели постоянного тока используются в детских игрушках, питающихся от обычных батарей постоянного тока. В промышленности двигатели постоянного тока приводят в действие широкий спектр машин и оборудования. Они питаются от аккумуляторных батарей большой емкости.
Основной обмоткой двигателя является якорь, который приводится в действие коллектором и щеточным механизмом. Он вращается в магнитном поле, создаваемом полюсами статора (корпус двигателя). Ребра жесткости состоят из различных витков, которые расположены в гнездах и закреплены специальным эпоксидным компаундом.
Статор может состоять из обмоток возбуждения или постоянных магнитов. В двигателях малой мощности используются постоянные магниты, в то время как двигатели большой мощности оснащены обмотками возбуждения в статоре. Статор оснащен торцевой крышкой со встроенным подшипником, который помогает вращать вал якоря. На одном конце этого вала установлен охлаждающий вентилятор, который создает прилив воздуха и нагнетает его в двигатель во время работы.
Принцип работы этих двигателей основан на законе Ампера. Когда проволочная рамка помещается в магнитное поле, она вращается. Протекающий через нее ток создает вокруг нее магнитное поле, которое взаимодействует с внешним магнитным полем и заставляет рамку вращаться. В современном двигателестроении роль рамы выполняет намотанный якорь. Через якорь проходит электрический ток, который создает магнитное поле вокруг якоря, заставляя его вращаться.
Обмотки якоря поочередно приводятся в действие специальными графито-медными щетками.
Проводники обмотки якоря соединены в единый узел, называемый коллектором, который представляет собой кольцо лопастей, прикрепленных к валу якоря. При вращении вала щетки поочередно приводят в действие обмотку якоря через лопасти коллектора. Это заставляет вал двигателя вращаться с постоянной скоростью. Чем больше витков в обмотке якоря, тем равномернее работает двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки трутся о коллектор и прижимаются к нему с постоянной силой в соответствии со своей формой. В процессе работы щетки изнашиваются, и результатом этого износа является токопроводящая пыль, которая налипает на детали двигателя. Эту пыль необходимо регулярно удалять. Удаление пыли обычно осуществляется с помощью воздуха высокого давления.
Поскольку пыль может накапливаться и налипать на шлиц отвертки, необходимо регулярно перемещать щетку в шлиц и проветривать его. Это может привести к зависанию щеток на коллекторе и вызвать неисправность двигателя. В связи с износом щетки следует регулярно заменять. На коллекторе также имеется износ в местах контакта между коллектором и щетками. По этой причине снимите якорь и обточите коллектор на токарном станке. После заточки коллектора неглубоко отшлифуйте изоляцию между лопастями коллектора, чтобы не повредить щетки, так как они прочнее щеток.
Тип.
Двигатели постоянного тока различаются по типу возбуждения.
Независимое возбуждение.
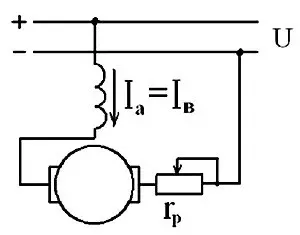
При таком типе возбуждения обмотки подключаются к внешнему источнику питания. Параметры двигателя аналогичны параметрам двигателя с постоянными магнитами. Скорость регулируется сопротивлением обмотки якоря. Скорость регулируется специальной муфтой, встроенной в цепь обмотки возбуждения. Если сопротивление значительно падает или цепь прерывается, ток якоря возрастает до опасного уровня.
Двигатели с косвенным возбуждением не следует запускать с малой нагрузкой или без нее, так как скорость быстро возрастет и двигатель выйдет из строя.
Параллельное возбуждение
Обмотка возбуждения и обмотка ротора подключены параллельно к источнику питания. При таком расположении ток возбуждения намного меньше тока ротора. Это делает двигатель очень жестким и может использоваться для перемещения вентиляторов и станков.
Управление скоростью двигателя осуществляется с помощью реостата, включенного последовательно с обмоткой возбуждения или цепью ротора.
Стимулирование серии.
В этом случае обмотка возбуждения подключается последовательно с обмоткой якоря, так что через обе обмотки протекает одинаковый ток. Частота вращения двигателя зависит от нагрузки. Если на холостом ходу нет нагрузки, запуск двигателя невозможен. Однако, поскольку двигатель имеет хорошие пусковые характеристики, такие схемы используются для работы больших электромобилей.
Реверс двигателя осуществляется путем изменения полярности одной обмотки и вращения ее в другую сторону. Различные резисторы используются для управления скоростью двигателя и поочередного поэтапного запуска.
Фиксированная цена двигателя
Одним из основных параметров двигателей постоянного тока является постоянная двигателя km. Константа двигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
- Где, — постоянная двигателя, Нм /√Вт, и
- R — сопротивление обмотки, Ом
- -максимальный крутящий момент, Нм
- Потребляемая мощность при максимальном крутящем моменте, Вт
Примечание: Стабильность двигателя и его размеры являются основополагающими параметрами для инженеров при выборе двигателя с наилучшим соотношением мощности и объема.
При использовании одного и того же материала проводника постоянная двигателя не зависит от соединения обмоток. Например, обмотка двигателя с шестью многожильными проводами и двумя параллельными проводниками вместо 12 одножильных проводов удваивает постоянную ADR без изменения постоянной двигателя.
Жесткость механических свойств двигателя
Уравнение баланса напряжений для клемм двигателя постоянного тока выглядит следующим образом (для импульсных двигателей падение напряжения на обоих концах щеточно-коллекторного узла не учитывается)
Уравнение напряжения, выраженное в терминах крутящего момента двигателя, имеет вид
Связь между крутящим моментом и скоростью для двух различных напряжений питания двигателя постоянного тока одинакова. При увеличении скорости крутящий момент линейно уменьшается. Наклон этой функции, KTKE/ R стабилен и не зависит от напряжения питания и скорости двигателя.
Эти функции позволяют легко управлять скоростью и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, но не так для двигателей переменного тока и шаговых двигателей1.
Источники питания двигателей постоянного тока
Упрощенная модель электродвигателя выглядит следующим образом
- Где я нахожусь — в настоящее время, А
- U — напряжение, В
- M — крутящий момент двигателя, Н∙м
- R — сопротивление токопроводящих элементов, Ом, и
- L — индукция, Gn,.
- PL — питание (снабжение), L Мощность (питание), Вт
- PМех. Механическая мощность (выход), Вт
- PТепло. Потери тепла, Вт
- Pинд Мощность, поглощаемая нагрузкой катушки, Вт
- Ptr потери на трение, W
Кроме того, конструкция имеет центральный вращающийся вал, который почему-то не показан на схеме. В некоторых случаях имеются также ножки (шарниры), с помощью которых устройство может быть соединено со столом.
Принцип работы
Помните из школы, что на силовые провода между полюсами магнита действуют силы излучения. Это происходит потому, что вокруг провода по всей его длине образуется магнитное поле. Взаимодействие магнитных полей приводит к возникновению силы «ампера».
F = B x I x L, где B — величина индукции магнитного поля, I — сила тока, а L — длина провода.
Вектор «ампер» всегда перпендикулярен линиям магнитного потока между полюсами. В общих чертах первая часть показана на рис. 6.6.
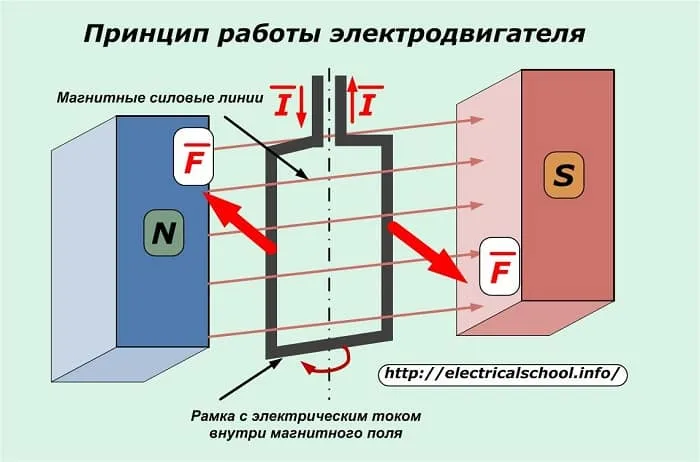
Рис. 6.Принцип работы.
При подключении к источнику питания с помощью петлевой рамки вместо прямого провода он поворачивается на 180° и останавливается в положении, при котором рекомендуемое усилие равно нулю. Надавите на раму. Он вернется в исходное положение.
Измените полярность и повторите попытку. Рама повернулась еще на пол-оборота. Разумно предположить, что направление тока должно меняться на противоположное каждый раз, когда соответствующая катушка обмотки проходит точку переключения полюсов. Это именно та цель, для которой предназначен коллектор.
В общих чертах каждую обмотку якоря можно представить как отдельный контурный каркас. Если обмоток несколько, то одна из них всегда находится в непосредственной близости от магнита статора и подвержена силе эмиссии. Это поддерживает постоянное вращение якоря.
Типы ДПТ
Существующие двигатели постоянного тока можно классифицировать двумя основными способами Наличие или отсутствие щеточных коллекторов в конструкции двигателя и тип магнитной системы статора.
Давайте рассмотрим основные различия.
При наличии щеточных коллекторов
Двигатели постоянного тока с щеточно-коллекторным устройством для переключения обмоток называются коммутационными. Они охватывают широкий спектр моделей электродвигателей. В некоторых двигателях используется до восьми узлов щеточного коллектора.
Работа ротора может осуществляться с помощью постоянных магнитов, а основной ток подается непосредственно на обмотки статора. В этой версии нет необходимости в коллекторе, а проблемы коммутации решаются электронным способом.
Эти двигатели без выключателей устраняют один из недостатков — искрение, приводящее к значительному износу коллекторных пластин и щеток. Кроме того, они просты в эксплуатации и сохраняют все удобные характеристики DPT, например, простоту управления скоростью и высокие показатели производительности. Двигатели без выключателей называются вентильными.
В зависимости от типа конструкции магнитной системы статора
Современные конструкции двигателей включают модели с ДПУ с постоянными магнитами и обмотками возбуждения. Последовательные двигатели, использующие статор с потоком возбуждения от обмоток, очень распространены. Они обеспечивают постоянную скорость вращения вала и высокую номинальную механическую силу.
Соединение обмоток статора описано выше. Следует еще раз подчеркнуть, что электрические и тяговые характеристики двигателей постоянного тока зависят от выбора соединения. Это различно для последовательных обмоток и параллельных катушек возбуждения.
Управление
Нетрудно заметить, что изменение полярности напряжения также изменяет направление вращения якоря. Это позволяет легко управлять двигателем, манипулируя полярностью щеток.
Механические характеристики
Изучите график зависимости между частотой вращения вала и крутящим моментом. Отображается линия с отрицательным наклоном. Наклон — это механическая реакция электродвигателя постоянного тока. Для его накачки выбирается определенное постоянное напряжение для питания обмоток ротора.
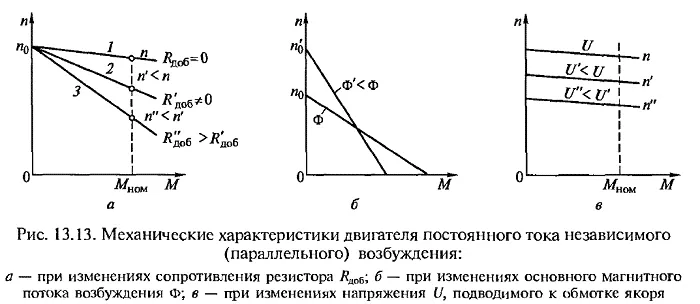
Пример механических характеристик двигателя постоянного тока с независимой накачкой
Кривая управления.
Такая же прямая линия, но с положительным наклоном, представляет собой график зависимости скорости вращения якоря от напряжения питания. Это функция управления современных двигателей.
Это характерная кривая современных двигателей.
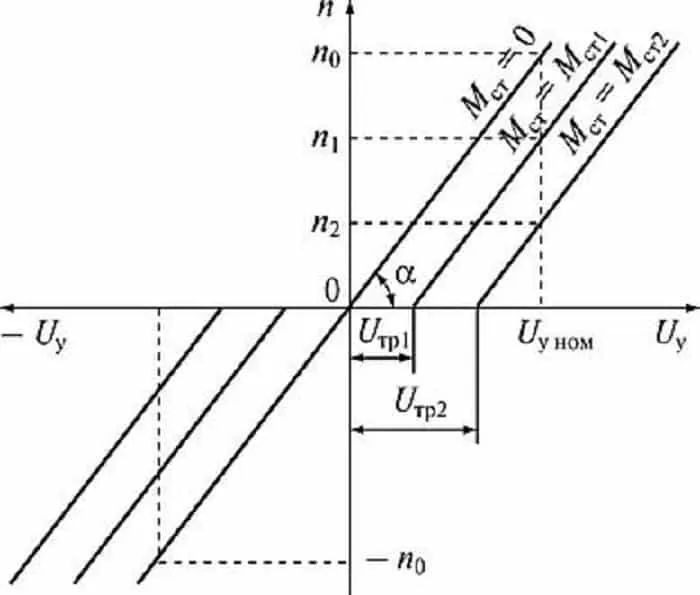
Пример типичной кривой современного двигателя с управлением якорем
Линейность характеристической кривой упрощает управление двигателями постоянного тока. Поскольку значение F пропорционально току, параметры двигателя можно регулировать, изменяя значение тока через переменный резистор.
Скорость вращения ротора можно легко контролировать, изменяя напряжение. При включении двигателей используется пускатель для плавного увеличения скорости. Это особенно важно для тяговых двигателей. Это также один из самых эффективных методов торможения. Мало того, в режиме торможения современный двигатель вырабатывает электричество, которое затем может быть подано обратно в сеть.
При таком типе подключения обмотки наматываются непосредственно на источник питания, и характеристики двигателей с таким типом возбуждения аналогичны характеристикам двигателей с постоянными магнитами.
Пусковые токи
Ротор двигателя постепенно оснащается дополнительными компонентами для обеспечения плавной работы и предотвращения торможения в секторе, а также при проблемах с запуском двигателя. Однако все это увеличивает вес ротора — его труднее толкать, учитывая сопротивление вала. Первым решением этой проблемы, которое приходит на ум, может быть увеличение тока, подаваемого во время запуска, но это может привести к неприятным последствиям.
- Линейный выключатель не выдерживает тока и становится активным.
- Перегрузки могут привести к перегоранию намотанных кабелей.
- Коммутационные элементы коллектора свариваются из-за перегрева.
Поэтому такое решение можно охарактеризовать как довольно опасную полумеру.
В целом, эта проблема является главным недостатком двигателей постоянного тока, но также содержит и главное преимущество, так как она необходима в некоторых областях. Это преимущество заключается в немедленной передаче крутящего момента сразу после запуска. Вал (при запуске) будет вращаться при любой нагрузке. Двигатели переменного тока не могут этого сделать.
Эта проблема еще не решена до конца. Сегодня для запуска таких двигателей используются автоматические стартеры, начало работы которых аналогично началу работы коробки передач автомобиля.
- Первоначально ток постепенно увеличивается с начальным значением.
- После «смещения» значение тока резко падает, а затем снова плавно увеличивается, чтобы «соответствовать вращению вала».
- После увеличения до предельного значения текущее значение снова уменьшается и «корректируется».
Этот цикл повторяется три-пять раз (рис. 4) и требует запуска двигателя без создания значительной нагрузки на сеть. Фактически, по-прежнему отсутствует «мягкий» пуск, но оборудование работает безопасно, и сохраняется главное преимущество крутящего момента — двигатель непрерывной мощности.
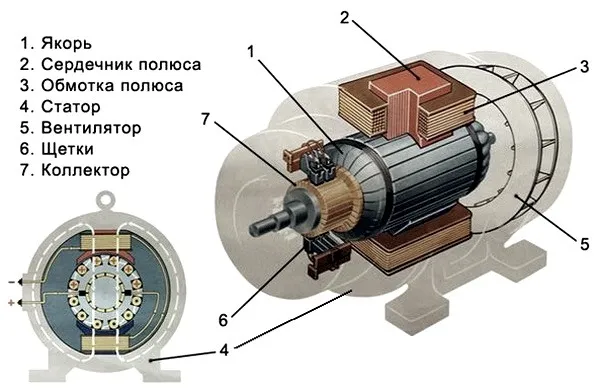
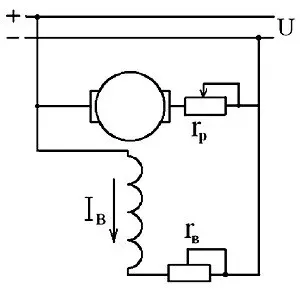
Схемы подключения
Подключение двигателя непрерывного действия несколько сложнее, чем двигателя переменного тока.
Двигатели большой и средней мощности обычно имеют специальные контакты обмотки возбуждения (EW) и усиления в клеммной коробке передач. Арматура обычно приводится в действие от ОУ с выходным напряжением и током источника. Обычно это регулируется розой. Скорость вращения двигателя напрямую связана с величиной тока, подаваемого на обмотку возбуждения.
Существуют три основных правила относительно усиления и диапазона мощности двигателей непрерывного действия
- Последовательное возбуждение используется для двигателей, требующих высокого тока загрузки (например, электромобили, прокатное оборудование). Этот макет включает в себя притирку и оружие, подключенное к питанию. Следует помнить, что даже четверть нагрузки на вал при непрерывном побуждении приводит к внезапному увеличению скорости, что может вызвать повреждение двигателя. Поэтому система используется в условиях постоянной нагрузки.
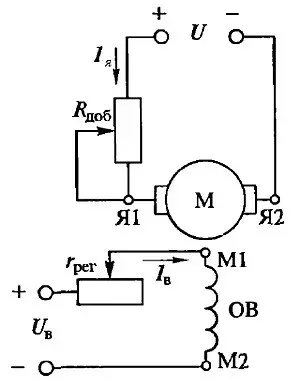
- Параллельное возбуждение используется в двигателях, работающих на станках, вентиляторах и другом оборудовании, которое не несет большой нагрузки на вал при запуске. В этой схеме используется независимая притирка для стимуляции ДУВ; ДУВ обычно регулируется Розмари.
- Независимая стимуляция очень похожа на параллельную стимуляцию, но использует независимый источник энергии для питания внутренних обмоток, избегая усиления и усиления поля.
Современные силовые электродвигатели могут использовать смешанную схему, основанную на трех перечисленных
Настройка скорости.
Метод управления скоростью двигателя непрерывного действия зависит от диаграммы входа.
- Для двигателей с параллельной стимуляцией снижение скорости по отношению к номинальной скорости может быть осуществлено путем изменения напряжения усиления и увеличения его путем нарушения потока стимуляции. При высоких скоростях (менее чем в четыре раза превышающих номинальную скорость) в контур реки добавляется розмарин.
- Стимулируя ряд, это можно легко регулировать с помощью переменного резистора в цепи усиления. Однако этот метод подходит только для снижения скорости и только при соотношении 1:3 или 1:2 (что приводит к более высоким потерям на РОСТС). Усиление обеспечивается за счет регулирования контуров Redostat.
Эти схемы редко используются в современном высокотехнологичном оборудовании из-за узкого диапазона регулирования и других недостатков. Сегодня для этих целей все чаще используются электронные схемы управления.
Инверсия.
Чтобы изменить направление вращения двигателя постоянного тока, необходимо выполнить следующее
- Для возбуждения массива — просто измените полярность входных контактов.
- При смешанном и параллельном возбуждении — направление тока в обмотке якоря должно быть обратным. Если обмотка отключена, приложенная ЭДС значительно возрастет, и изоляция кабеля может быть повреждена.
Сфера применения
Как вы могли заметить, двигатели постоянного тока полезны в тех случаях, когда невозможно обеспечить непрерывное бесперебойное электропитание. Хорошими примерами являются автомобильные стартеры, которые толкают двигатели внутреннего сгорания «от земли», или детские игрушки с моторчиками. В этих случаях для запуска двигателя используются аккумуляторы. В промышленных условиях DTA используются в прокатных станах.
Основное применение — электрический транспорт. Локомотивы, электродвигатели, трамваи и троллейбусы имеют очень высокое пусковое сопротивление, и превзойти его могут только двигатели постоянного тока с характеристиками мягкого пуска и широким диапазоном регулирования скорости. С быстрым развитием и распространением экологически чистых транспортных технологий область применения двигателей постоянного тока постоянно расширяется.

В приведенном выше примере примитивного электродвигателя ротор состоит из двухзубого жесткого элемента с одной обмоткой, с четко определенными полюсами. Конструкция обеспечивает вращение вала двигателя.
Классификация
- Статор на тип магнитной системы
- С постоянным магнитом
- С электромагнитами
- Подключение обмотки возбуждения электромагнита статора
Двигатели постоянного тока отличаются способом включения обмотки возбуждения. Тип соединения обмоток возбуждения оказывает значительное влияние на тяговые и электрические характеристики электродвигателя. Обмотки возбуждения могут иметь независимые, параллельные, последовательные и смешанные схемы соединения.
Принцип работы
Существует два подхода к работе двигателя постоянного тока: 1. токоведущая рамка (два стержня) в магнитном поле статора; 2. взаимодействие магнитных полей статора и ротора.
Рамка с током, протекающим в однородном магнитном поле полюсов статора.
В однородном магнитном поле полюсов статора, индуцированном постоянным значением тока, в
Эти силы прикладываются к плечам
— радиус рамки, и создают крутящий моментДля двух перекладин рамы общий крутящий момент составляет
радиан немного меньше угловой ширины зазора sin(w\cdot t) d(w\cdot t)» width=»» height=»» />, где
При числе витков в обмотке равном s крутящий момент будет равен
Наибольший крутящий момент будет при угле поворота рамки равном
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периодаsin(w \ cdot t)d(w \ cdot t)/\pi. «width=»» height = «»»/>
В однородном магнитном поле полюсов статора протекают два тока.
Когда вторая рамка, смещенная относительно первой рамки на угол p/2, помещается на ротор машины, образуется квадрупольный ротор. Момент второго контекста:.
Суммарный крутящий момент обеих рам:.
Таким образом, крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем в случае с одной рамой. Кроме того, добавлена функция самозапуска из любого положения ротора. В этом случае для второй рамы требуется второй коллектор (щеточный коллекторный узел). Поскольку оба устройства соединены параллельно, ток в рамке активен в интервале минимального тока в рамке, тогда как при последовательном соединении ток в одной рамке (автоматическом выключателе) активен в момент максимального тока в другой рамке. На практике угловая ширина αrad щетки немного меньше угловой ширины βrad между коллекторами (пластинами) восьми меньших секций под кривой крутящего момента, так что
где Δ = β — α не вносит вклад в общий крутящий момент.
Рамка, в которой ток течет в неоднородном магнитном поле полюсов статора.
Если магнитное поле полюсов статора неоднородно и изменяется относительно стержня рамки по закону
для рамки из
равны четырем частям под кривой крутящего момента.
.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода
(sin (ߡ omega \ cdot t))^2 d (ߡ omega \ cdot t) /\ pi «width =» «» height =» «» />
Две рамки с токами в неоднородном магнитном поле полюса статора
Для второй (косинусной) рамки
Вращающий момент из второй (косинусной) рамки равен
Суммарный крутящий момент от обеих рам равен
На практике, из-за зазора, восемь меньших частей под кривой крутящего момента являются
Каждый из
не участвуют в создании крутящего момента.
Чтобы рассчитать момент инерции ротора, в первом приближении его можно рассматривать как непрерывный однородный цилиндр с моментом инерции.
— масса цилиндра (ротора),
Взаимодействие магнитных полей
Магнитные поля статора и ротора (рамки с током) взаимно отталкиваются, чем приводят ротор (рамку) во вращение на 180°. Для дальнейшего вращения необходимо переключить направление тока в рамке.
Управление с замкнутым циклом
Механические характеристики двигателя.
Частота в зависимости от крутящего момента на валу двигателя. Отображается в виде графика. Горизонтальная ось (абсцисса) — крутящий момент на валу ротора, а вертикальная ось (нормаль) — скорость вращения ротора. Механическая характеристика гидротрансформатора двигателя представляет собой прямую линию с отрицательным наклоном.
Механическая характеристика ДТ формируется при определенном напряжении питания обмоток ротора. Если характеристики строятся в зависимости от нескольких напряжений питания, они называются семейством механических характеристик двигателя.
Характеристики управления двигателем.
Зависимость скорости вращения ротора от напряжения питания обмотки ротора DT. Отображается в виде графика. Горизонтальная ось (абсцисса) — напряжение питания обмотки ротора, а вертикальная ось (обычно) — скорость вращения ротора. Регулирующая характеристика гидротрансформатора двигателя представляет собой прямую линию с положительным наклоном.
Характеристики регулирующего двигателя зависят от удельного крутящего момента, развиваемого двигателем. Если регулировочная характеристика дана для нескольких значений крутящего момента на валу ротора, то говорят о семействе регулировочных характеристик DT.
Управление с замкнутым циклом
Основная формула для управления электрическим преобразователем:.
Вращающий момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора).
— ток в обмотке якоря,
Ток в обмотке ротора по закону Ома прямо пропорционален приложенному напряжению и обратно пропорционален сопротивлению обмотки ротора.
— напряжение, приложенное к обмотке ротора,
Противо-ЭДС обмотки якоря пропорциональна угловой частоте ротора.
— коэффициент ЭДС двигателя,
Поэтому крутящим моментом можно управлять, изменяя напряжение двигателя. Этот метод используется для относительно маломощных двигателей.
Используется для управления более мощными (производительными) двигателями: а) при изменении принципа ШИМ, величины напряжения и длительности его приложения к двигателю; б) при изменении напряжения обмотки возбуждения управление моментом требует меньшей мощности, чем регулирование изменения напряжения поперек двигателя, что делает элементы схемы управления регулируется, но при таком способе регулирования ток не контролируется, так как даже большой ток малого момента через якорь нагревает якорь. Регулирование крутящего момента может использоваться для регулирования крутящего момента в небольшом диапазоне номинального крутящего момента.
Двигатель управляется током в обмотке двигателя. Это пропорционально напряжению, приложенному к этой обмотке. Реакцию двигателя на определенное напряжение при определенном внешнем моменте можно увидеть в соответствующей характеристике управления. Характеристическая кривая показывает скорость, достигаемую двигателем в установившемся режиме.







