Помимо этого трехфазные асинхронные двигатели могут использовать прямую и реверсивную схему включения в цепь. Первый вариант применяется только для вращения вала электродвигателя в одном направлении. В реверсивной схеме можно переключать движение рабочего органа в прямом и обратном направлении.
Механические характеристики 3х-фазного асинхронного двигателя.
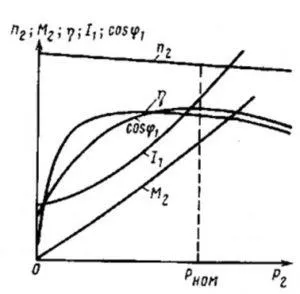
Рабочие характеристики асинхронного двигателя представляют собой зависимости скольжения S, числа оборотов ротора n2, развиваемого момента М, потребляемого тока I1, расходуемой мощности Р1, коэффициента мощности соs j и к. п. д. η от полезной мощности Р2 на валу машины. Эти характеристики (рис. 115) снимаются три естественных условиях работы двигателя, т. е. двигатель нерегулируемый, частота f1 и напряжение U1 сети остаются постоянными, а изменяется только нагрузка на валу двигателя.
При увеличении нагрузки на валу двигателя скольжение возрастет, причем при больших нагрузках скольжение увеличивается несколько быстрее, чем при малых.
При холостом ходе двигателя п2=n1 или S=0.
При номинальной нагрузке скольжение обычно составляет S = 3-5%.
Так как при увеличении нагрузки на валу двигателя скольжение возрастает, то число оборотов будет уменьшаться. Однако изменение скорости вращения при увеличении нагрузки от 0 до номинальной очень незначительно и не превышает 5%. Поэтому скоростная характеристика асинхронного двигателя является жесткой — она имеет очень малый наклон к горизонтальной оси.
Вращающий момент, развиваемый двигателем М, уравновешен тормозным моментом на валу М2 и моментом, идущим на преодоление механических потерь М0, т. е.
где Р2 — полезная мощность двигателя,
W2 — угловая скорость ротора.
При холостом ходе двигателя вращающий момент равен М0; с увеличением нагрузки на валу этот момент также увеличивается, причем за счет некоторого уменьшения скорости ротора увеличение вращающего момента происходит быстрее, чем увеличение полезной мощности на валу.
Сила тока I1 потребляемого двигателем из сети, неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе соs j мал и ток имеет большую реактивную составляющую и очень малую активную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, а потому изменение нагрузки, т. е. изменение активной составляющей тока, вызывает незначительное изменение силы тока I1 (определяющейся в основном реактивной составляющей). При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение силы тока I1..
Потребляемая двигателем мощность Р1 при графическом изображении имеет вид почти прямой линии, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с увеличением нагрузки.
Изменение коэффициента мощности при изменении нагрузки на валу двигателя происходит следующим образом. При холостом ходе соsj мал (порядка 0,2), так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу соsj возрастает (достигая наибольшего значения 0,8—0,9) в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение соsj, так как вследствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая к. п. д. т) имеет такой же вид, как в любой машине или трансформаторе. При холостом ходе к. п. д. равен нулю. С увеличением нагрузки на валу двигателя к. п. д. резко увеличивается, а затем уменьшается. Наибольшего значения к. п. д. достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим от нагрузки.
Конструкция асинхронного двигателя с короткозамкнутым ротором
Определение 1
Асинхронный двигатель с короткозамкнутым ротором — это асинхронный электрический двигатель, ротор которого выполнен с короткозамкнутой обмоткой в виде беличьей клетки.
В каждом электрическом двигателе есть два основных элемента:
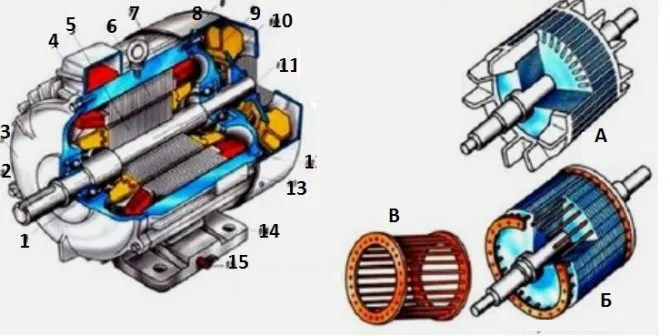
Статор и рот заключены в защитный кожух. Чтобы охлаждать проводники обмотки на валу устанавливается вентилятор. Данный принцип положен в основу строения всех типов двигателей. Конструкция статора асинхронных двигателей с короткозамкнутым ротором ничем не отличается от строения статора других видов двигателей. Пример схемы конструкции асинхронного двигателя с короткозамкнутым ротором представлен на рисунке ниже.
Готовые работы на аналогичную тему
- Курсовая работа Асинхронный двигатель с короткозамкнутым ротором 470 руб.
- Реферат Асинхронный двигатель с короткозамкнутым ротором 280 руб.
- Контрольная работа Асинхронный двигатель с короткозамкнутым ротором 210 руб.
Получить выполненную работу или консультацию специалиста по вашему учебному проекту Узнать стоимость
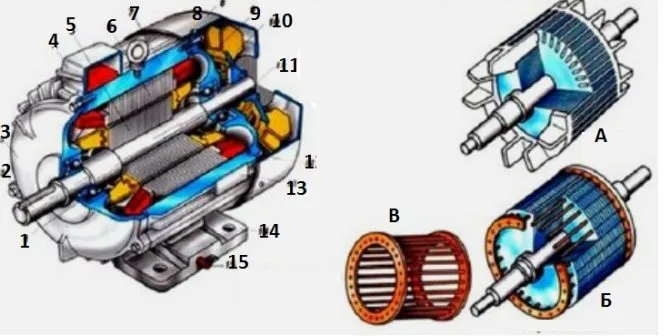
Рисунок 1. Схема конструкции асинхронного двигателя с короткозамкнутым ротором. Автор24 — интернет-биржа студенческих работ
1 — подшипник; 2 — вал; 3 — подшипниковый щит; 4 — коробка выводов; 5 — сердечник ротора с короткозамкнутой обмоткой; 6 — сердечник статора с обмоткой; 7 — корпус; 8 — кожух вентилятора; 9 — подшипниковый щит; 10 — вентилятор; 11 — подшипник; 12 — обмотка статора; 13 — паспортная табличка; 14 — лапы; 15 — болт заземления; А — литая обмотка; Б — сварная обмотка; В — короткозамкнутая обмотка ротора без сердечника.
Конструкция обмотки ротора похожа на беличью клетку. Данная клетка состоит из алюминиевых стержней, концы которых замыкают короткозамыкающие кольца. В двигателях большой мощности могут быть использованы в качестве обмотки медные стержни. Стержни располагаются поверх сердечников ротора, которые изготавливаются из трансформаторной стали. При производстве роторов сердечники монтируют на валу, а проводники заливают в пазы магнитопровода. При такой конструкции необходимость в изоляции пазов сердечника отпадает. На рисунке ниже представлен пример схемы ротора с короткозамкнутой обмоткой.
Ты эксперт в этой предметной области? Предлагаем стать автором Справочника Условия работы
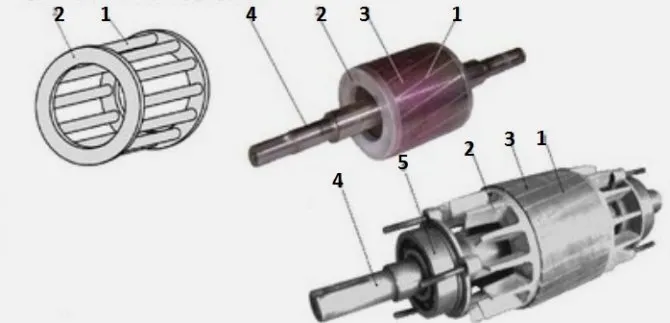
Рисунок 2. Схема ротора с короткозамкнутой обмоткой. Автор24 — интернет-биржа студенческих работ
Магнитопроводы таких роторов не нуждаются в лаковой изоляции поверхностей, они относительно просты в изготовлении, что способствует снижению себестоимости всего двигателя. Ротор асинхронно вращается внутри статора. Между ними устанавливается расстояние — воздушные зазоры, размер которых может составлять от 0,2 до 0,5 миллиметров. Для того, чтобы улучшить пусковые характеристики электродвигателя с короткозамкнутым контуром используются роторы со специальной формой пазов — глубокопазные роторы. Данное решение позволяет использовать эффект вытеснения тока, способствующий увеличению активного сопротивления обмотки ротора при больших скольжениях.
Механическая характеристика, построенная таким образом, называется естественной. Изменяя другие параметры можно получить искусственную механическую характеристику.
Устройство асинхронной машины
Схематичное устройство асинхронной машины
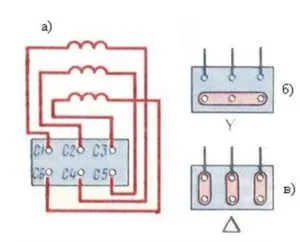
Классическая асинхронная машина состоит из 2 основных частей: ротора (подвижной) и статора (неподвижной). Три отдельные фазы составляют обмотку статора. С1, С2 и С3 — обозначения начала фаз. С3, С4 и С5 — соответственно концы фаз. Все они подсоединены к клеммному разъему по схеме звезда или треугольник, что показано на рисунках а, б, в. Схему выбирают учитывая паспортные данные двигателя и сетевое напряжение.
Статор создает внутри электродвигателя магнитное поле, которое постоянно вращается.
Ротор различают короткозамкнутый и фазный.
В короткозамкнутом скорость вращения не регулируется. Конструкция с ним проще и дешевле. Однако пусковой момент у него слишком мал по сравнению с машинами, у которых фазный ротор. Здесь скорость вращения регулируется за счет возможности ввода дополнительного сопротивления.
Принцип работы асинхронной машины
Подавая напряжение на обмотку статора, по каждой фазе можно наблюдать изменяющиеся магнитные потоки, которые по отношению друг к другу смещены на 120 градусов. Общий результирующий поток получается вращающимся и создает ЭДС внутри проводников ротора.
Там появляется ток, который во взаимодействии с результирующим потоком создает пусковой момент. Это приводит к вращению ротора.
Возникает скольжение S, т. е. разность между частотой вращения самого ротора n2 и частотой магнитного поля статора n1. Первоначально оно равно 1. Впоследствии частота возрастает, разность n1 – n2 уменьшается. Это ведет к уменьшению вращающего момента.
На холостом ходу скольжение минимально. Оно достигает критического значения Sкр, когда увеличивается статический момент. Превышение Sкр ведет к нестабильной работе машины.
Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
Принцип действия мотора
Первое, что осуществляется – на статорную обмотку подается электрическое напряжение. По каждой отдельной фазе можно видеть постоянно меняющиеся магнитные потоки, смещенные по отношению друг к другу на угол 120 градусов. В результате получается общий результирующий поток, который также вращаемый, а с его помощью создается электродвижущая сила внутри роторных проводников.
Именно так в результате получается ток, который совмещается с потоком результирующим, что создает момент пуска. А он в свою очередь приводит ротор в движение.
Это общее, упрощенное описание принципа действия силового агрегата с разными скоростями оборотов. Для того, чтобы рассмотреть работу мотора, стоит углубиться в механические и рабочие характеристики, точно влияющие на вышеописанный алгоритм срабатывания.
Механическая характеристика
Суть данного параметра состоит в прямой зависимости частоты оборотов ротора от показателей нагрузки. То есть, от момента вращения на валу. Когда нагрузка находится на номинальном уровне, то частота вращений для разнотипных моторов варьируется в диапазоне от 92,5 до 98% от частоты оборотов n1. Скольжение (Sном) при этом не превышает уровень в 2 – 7,5%.
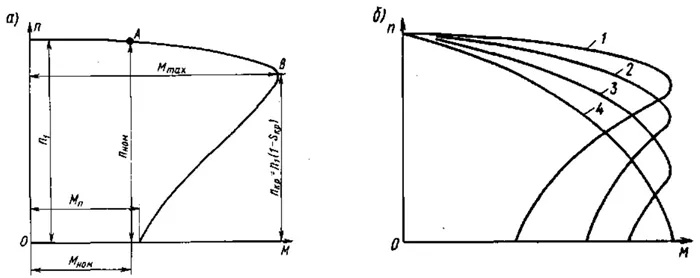
Чем выше уровень нагрузки, с которой работает мотор, тем ниже частота оборотов электрического мотора. Частота оборотов асинхронного двигателя несущественно снижается при усилении нагрузки в пределах от нуля до максимального значения. Визуально это можно видеть выше, на рисунке А. из этого следует, что электрический агрегат относится к моторам с жесткой механической характеристикой.
М макс., то есть наибольший крутящий момент, агрегат развивает, когда имеется определенное скольжение (Skp), который находится на уровне от 10 до 20 процентов. Соотношение величин Ммакс и Мном указывает на перегрузочную способность мотора. Отношение же Мп к М номинальному, указывает на пусковые качества электродвигателя.
Электрический мотор способен стойко и бесперебойно работать при условии обеспечения самостоятельного регулирования, когда будет автоматически установлено равновесие между моментом нагрузки, нацеленным на вал (Мвн) и М моментом, который развивает непосредственно двигатель. Это условие отлично отображается на верхней части характеристики, при достижении максимального показателя М. Другими словами — до уровня точки В.
В ситуациях, когда момент нагрузки М превышает показатель М макс., то мотор имеет сниженную устойчивость и останавливается. Параллельно с этим по машинным обмоткам будет довольно долго подаваться ток в несколько раз выше номинального, что может привести к перегоранию. Температура деталей растет, из-за превышенного электричества.
При подключении в электрическую цепь роторных обмоток от пускового реостата, на выходе мы получим полный набор механических характеристик. Первый параметр при эксплуатации мотора без стартового реостата, называют естественной характеристикой. Второй, третий и четвертый показатель, которые получаются при подсоединении к роторной обмотке двигателя реостата, обладают сопротивлениями R1п (2п и 3п соответственно), относятся к механическим характеристикам реостатного типа.
Когда же проводится запуск пускового реостата, механическую характеристику называют мягкой или крутопадающей. Это обусловливается тем, что существенно возрастает показатель активного сопротивления роторной цепи R2 и увеличивается Sкр. Параллельно с этим снижается ток запуска. Данная величина (Мп) также регулируется R2. При этом, существует возможность подобрать реостат с определенным сопротивлением, для того, чтобы момент пуска (Мп) равнялся максимальному М.
Электромеханическая характеристика
Показатель является зависимостью угловой скорости оборотов от статорного тока. При использовании сразу нескольких опорных точек можно создать такую характеристику. Для этого проводят расчет таких величин:
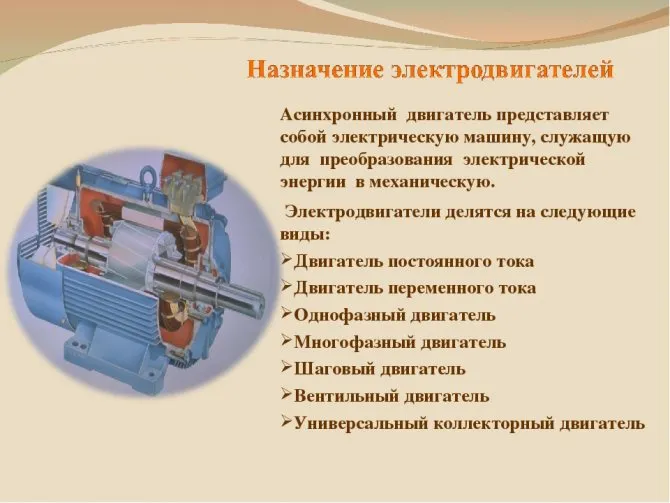
Эта конструкция достаточно широко применяется в различных сферах человеческой жизнедеятельности. Без них немыслима работа станков, транспортеров, подъемно-транспортных машин. Двигатели, обладающие небольшой мощностью, широко используются в автоматике.
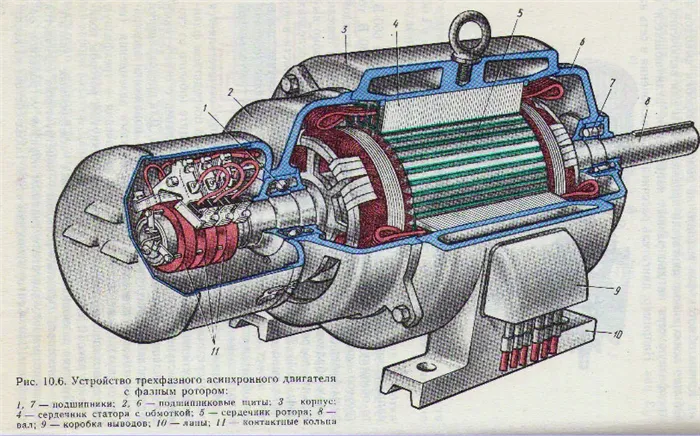
Трехфазный асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором — асинхронный двигатель, у которого обмотка ротора присоединена к контактным кольцам 1.
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.

Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M | |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | Р1 | |
| вторая фаза | Р2 | |
| третья фаза | Р3 | |
| нулевая точка | 0 | |
| Соединение треугольником (число выводов 3) | ||
| первый вывод | Р1 | |
| второй вывод | Р2 | |
| третий вывод | Р3 | |
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Назначение и сфера применения АД
Без асинхронного двигателя не обходится большинство предприятий.
Электродвигатели, которые называются асинхронными, применяются почти во всех отраслях промышленности и сельского хозяйства. Они тратят около 70% электричества, которое предназначено для превращения мощности тока в поступательное движение. Работа асинхронного двигателя считается наиболее эффективной в качестве электрической тяги. Без подобных машин не обходится большинство предприятий.
У данных устройств есть несколько положительных сторон:
- Простая и недорогая конструкция, поэтому производство машин не отнимает много времени и средств.
- Низкие расходы по эксплуатации обеспечены отказом от скользящего узелка токосъема, что и повышает надежность мотора.
- Доступность. Они продаются почти во всех магазинах по невысокой цене.
Данный вид машин бывает трехфазным или однофазным в зависимости от числа питающих частей. Если соблюдать правила техники безопасности и настроить электросеть, то трехфазный мотор может работать на однофазной сети.
Асинхронные устройства используются не только на производстве, но и в быту. Однофазные двигатели устанавливаются в вентиляторы, стиральные машины, насосы для воды и небольшие электрические инструменты.
Область применения
В виду особенности конструкции и простоты изготовления, подобные электромоторы нашли основное применение в машинах и механизмах в которых не требуется большое усилие и мощность при работе.
В основном, такие моторы устанавливаются практически на всех бытовых приборах:
- мясорубки;
- фены;
- электрические миксеры;
- бытовые вентиляторы;
- небольшие маломощные бытовые станки;
Трехфазные асинхронные моторы имеют различную мощность, от 150 Вт до нескольких киловатт, и применяются в основном в промышленности в качестве моторов для машин и механизмов.
Применение подобного типа моторов обусловлено приемлемым с точки зрения соотношения мощность/производительность, к тому же, как и их простейшие собраться такие двигатели не требуют большого внимания и кропотливого обслуживания, в особенности те типы корпуса, которые специально разработаны для работы в тяжелых условиях производства.
В виду различных конструкторских задач, стоящих перед разрабатываемыми машинами и механизмами в промышленном, серийном производстве, нашли свое применение асинхронные линейные электромоторы основных четырех видов:
Моторы для однофазной сети
С короткозамкнутым ротором.
Двигатели для двухфазной сети
С короткозамкнутым ротором.
Трехфазные асинхронные двигатели
С короткозамкнутым ротором.
Читать также: Какие существуют сварочные аппараты
Трехфазные двигатели
С фазным ротором.
Особенностью конструкции является заложенный принцип работы однофазного асинхронного двигателя – у него только одна обмотка статора рабочая. А вот для пуска используется дополнительная обмотка, ее назначение – подключение к сети посредством конденсатора. Такое подключение используется для создания начального сдвига фаз и пускового момента, проще говоря, для того, чтобы вал начал вращаться.
Второй тип электрических моторов – двухфазные двигатели, имеют две рабочие обмотки. Такое техническое решение позволяет наиболее эффективно работать от однофазной сети, используя фазосдвигающий конденсатор для получения вращающегося магнитного поля.
Трехфазные асинхронники, имеют в своем составе по одной обмотке на каждую фазу подаваемого напряжения – три рабочие обмотки с соответствующим сдвигом относительно друг друга на 120 градусов. Это позволяет при включении в трехфазную сеть, получить электрическое поле, приводящее в движение короткозамкнутый ротор.
Для четвертого трехфазного асинхронника с фазным ротором, статор устроен таким же образом – три обмотки с соединением по типу звезда.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Так, например, для двигателей нормального исполнения мощностью от 1 до 1000 кВт номинальное скольжение приблизительно составляет соответственно 0,06-0,01, т.е. 6-1%.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
Статор – это неподвижная часть двигателя, сердечник которой выполняется из электротехнической стали и монтируется в станину. Станина выполняется литым способом из материала, который не магнитится (чугун, алюминий). Обмотки статора являются трехфазной системой, в которой провода уложены в пазы с углом отклонения 120 градусов. Фазы обмоток стандартно подключают к сети по схемам «звезда» или «треугольник».

Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Такой тип электрической машины был впервые запатентован М.О. Доливо-Добровольским и в народе называется «беличье колесо» из-за внешнего вида конструкции. Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Асинхронный двигатель с фазным ротором
Такое устройство позволяет регулировать скорость работы в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, которая соединяется по схемам «звезда» или треугольник. В таких электродвигателях в конструкции имеются специальные щетки, с помощью которых можно регулировать скорость движения ротора. Если в механизм такого двигателя добавить специальный реостат, то при пуске двигателя уменьшится активное сопротивление и тем самым уменьшатся пусковые токи, которые пагубно влияют на электрическую сеть и само устройство.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.
Способы пуска и схемы подключения
Асинхронный электродвигатель с короткозамкнутым ротором обладает низкой себестоимостью, большими пусковыми токами и низким усилием на старте. Поэтому для различных целей могут применять различные способы пуска, снижающие бросок тока в обмотках и улучшающие рабочие характеристики:
- прямой – напряжение на электродвигатель подается через пускатели или контакторы;
- переключение схемы соединения обмоток электродвигателя со звезды на треугольник;
- понижение напряжения;
- плавный пуск;
- изменение частоты питающего напряжения.
Однофазного асинхронного двигателя.
Для асинхронного однофазного электродвигателя могут использоваться три основных способа пуска:
Трехфазного асинхронного двигателя.
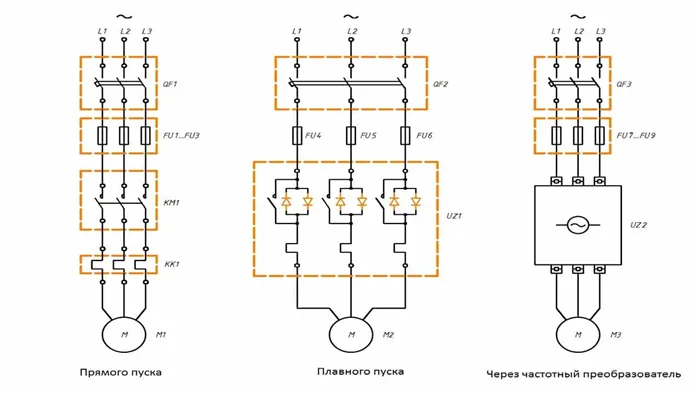
Трехфазные асинхронные агрегаты могут подключаться такими способами:
- Напрямую в цепь через пускатель или контактор, что обеспечивает простоту процесса, но формирует максимальные токи. Этот способ не подходит в случае больших механических нагрузок на вал.
- Переключением схемы со звезды на треугольник – применяется для снижения токов в обмотках электродвигателя за счет уменьшения питающего напряжения с линейного на фазное.
- Путем подключения через преобразователь напряжения, реостаты или автотрансформатор для снижения разности потенциалов. Также используется изменение числа пар полюсов, частоты питающего напряжения и прочие.
Помимо этого трехфазные асинхронные двигатели могут использовать прямую и реверсивную схему включения в цепь. Первый вариант применяется только для вращения вала электродвигателя в одном направлении. В реверсивной схеме можно переключать движение рабочего органа в прямом и обратном направлении.
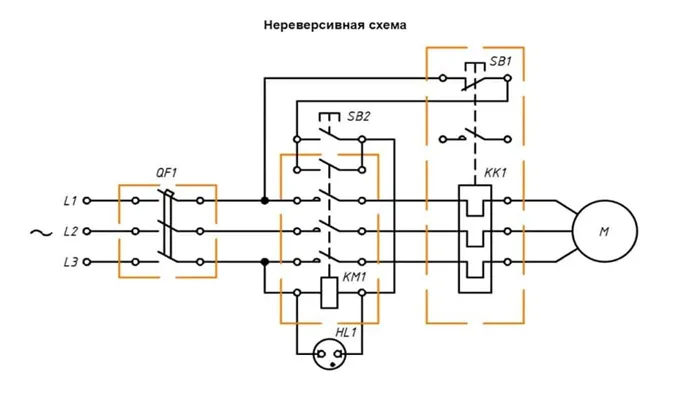
Рис. 9: прямая схема без возможности реверсирования
Рассмотрим нереверсивную схему пуска асинхронного электродвигателя (рисунок 9). Здесь, через трехполюсный автомат QF1 питание подается на пускатель KM1. При нажатии кнопки SB2 произойдет подача напряжения на обмотки электродвигателя, его остановка осуществляется кнопкой SB1. Тепловое реле KK1 применяется для контроля температуры нагрева, а лампочка HL1 сигнализирует о включенном состоянии контактора.
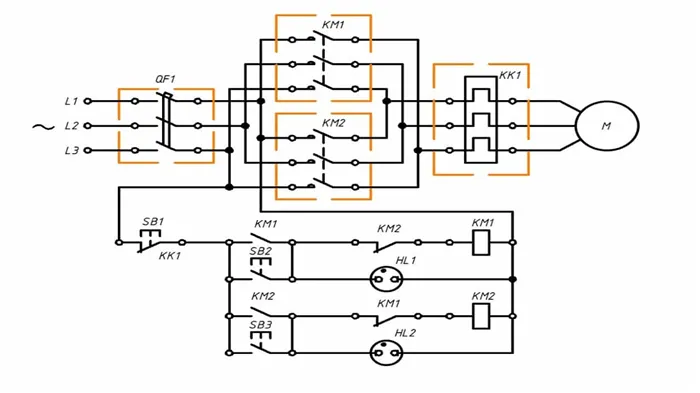
Рисунок 10: схема прямого включения с реверсом
Реверсивная схема (смотрите рисунок 10) устроена аналогичным образом, но в ней используются два пускателя KM1 и KM2. Прямое включение асинхронного электродвигателя производиться кнопкой SB2, а обратное SB3.
Применение
Область применения асинхронных электродвигателей охватывает достаточно большой сегмент хозяйственной деятельности человека. Поэтому их можно встретить в различных типах станочного оборудования – токарных, шлифовальных, фрезерных, прокатных и т.д. В работе грузоподъемных кранов, талей, тельферов и прочих механизмов.
Их используют для лифтов, горнодобывающей техники, землеройного оборудования, эскалаторов, конвейеров. В быту их можно встретить в вентиляторах, микроволновках, хлебопечках и прочих вспомогательных устройствах. Такая популярность асинхронных электродвигателей обусловлена их весомыми преимуществами.







