Примечания во всех ячейках столбцов объясняют, как и где выбираются все значения или вычисляется тип.
Расчет диаметра шкивов
Существует несколько вариантов адаптивной системы. Любая из них должна быть описана более подробно.
Первоначально это устройство было разработано для регулирования коллекторных двигателей в электромобилях. Двигатели 24 В, но конструкция может быть применена и к другим двигателям.
Недостатком схемы, обнаруженным в ходе эксплуатационных испытаний, является ее плохая пригодность для работы при очень высокой мощности. Это связано с замедлением работы транзисторных элементов в схеме.
Рекомендуется, чтобы ток не превышал 70 А. Поскольку в этой схеме нет защиты по питанию и температуре, рекомендуется встроить амперметр и визуально контролировать ток. Частота переключения составляет 5 кГц и определяется конденсатором C2 емкостью 20 нФ.
Рекомендуется подобрать значение R1 для достижения правильного функционирования регулятора. С выхода микросхемы управляющие импульсы поступают на транзисторные усилители КТ815 и КТ816, а затем на транзисторы.
Печатная плата имеет размеры 50×50 мм и изготовлена из одной стеклянной подложки.
На схеме показаны два дополнительных резистора 45 Ом. Это связано с возможностью подключения обычного компьютерного вентилятора для охлаждения устройства. Если в качестве нагрузки используется электродвигатель, цепь должна быть перекрыта закрытым проходом (демпфирование). По своим характеристикам он должен выдерживать вдвое больший ток нагрузки и вдвое большее напряжение питания.
Эксплуатация устройства без таких проходов может привести к повреждению из-за возможного перегрева. В этом случае диоды должны быть установлены на теплоотводы. Для этого можно использовать металлические пластины с поверхностью 30 см2.
Ключ управления работает так, что теряется очень мало энергии. В оригинальной схеме использовался стандартный компьютерный вентилятор. Для подключения 24 В использовался ограничительный резистор 100 — Ω.
Собранное устройство имеет следующий формат.
При создании блока питания (см. рисунок ниже) кабели следует подключать так, чтобы на высокопоточных проводах было как можно меньше витков. В некоторых случаях имеет смысл использовать коммерчески доступную торговлю.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут существовать непрерывно или попеременно с последовательной, параллельной или смешанной стимуляцией (для переменного тока используются только первые два вида стимуляции).
Двигатели с коллекторами состоят из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через старые и курсорные обмотки, которые соединены определенным образом, создает магнитное поле, которое заставляет курсор вращаться. Напряжение передается на курсор с помощью щеток, изготовленных из мягких электрических проводников, обычно графита или медно-графитовой смеси. Если направление тока меняется на курсоре или статоре, вал начинает вращаться в противоположном направлении, и это всегда происходит при курсоре, так что ядро не переоценивается.
Если одновременно изменяются соединения курсора и статора, реверса не происходит. Существуют также трехфазные коллекторные двигатели, но это уже совсем другая история.
Двигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (обмотка статора) двигателя с параллельным возбуждением состоит из нескольких катушек тонкого провода, соединенных параллельно ротору, который имеет гораздо меньшее сопротивление обмотки. Поэтому в цепь ротора включен пусковой реостат для снижения тока при запуске двигателей мощностью более 1 кВт. Управление скоростью двигателя в этой схеме осуществляется путем изменения тока только в цепи статора. Это связано с тем, что метод снижения напряжения на клеммах не очень экономичен и требует использования регулятора большой мощности.
Двигатели постоянного тока с последовательным возбуждением
Обмотки возбуждения двигателей этого типа имеют небольшое количество витков грубого провода, которые, будучи размещенными последовательно с цепью ротора, обеспечивают одинаковый ток для всей цепи. Эти двигатели более устойчивы к перегрузкам и поэтому наиболее часто используются в бытовых приборах.
- Подключив к статору регулятор потока, двигатель может работать на статоре. Однако этот метод очень сложен в реализации и не используется в бытовой технике.
- Регулирование скорости с уменьшением (понижением) напряжения. Этот метод используется почти во всех приборах (бытовая техника, инструменты и т.д.).
Эти однофазные двигатели менее эффективны, чем двигатели постоянного тока, но широко используются в бытовой технике и электроинструментах благодаря более простой конструкции и схемам управления. Их можно назвать «универсальными», поскольку они могут работать как от источников переменного, так и постоянного тока. Это происходит потому, что при подаче переменного напряжения направление магнитного поля и тока одновременно изменяется на противоположное относительно статора и ротора, не изменяя направления вращения. Реверс этих устройств достигается путем инвертирования концов ротора.
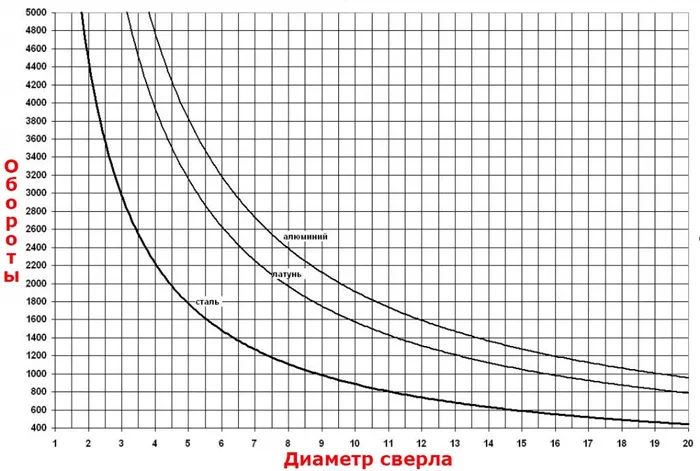
Зависимость оборотов от диаметра шкива
Ножевой вал деревообрабатывающего станка вращается со скоростью 3000… .3500 об/мин, как правильно рассчитать диаметр шкива, чтобы он вращался со скоростью 3500 об/мин. Скорость вращения электродвигателя составляет 1410 об/мин (двигатель 3-фазный, но преобразуется в однофазный (220 В) с помощью системы конденсаторов. Ремень является клиновым.
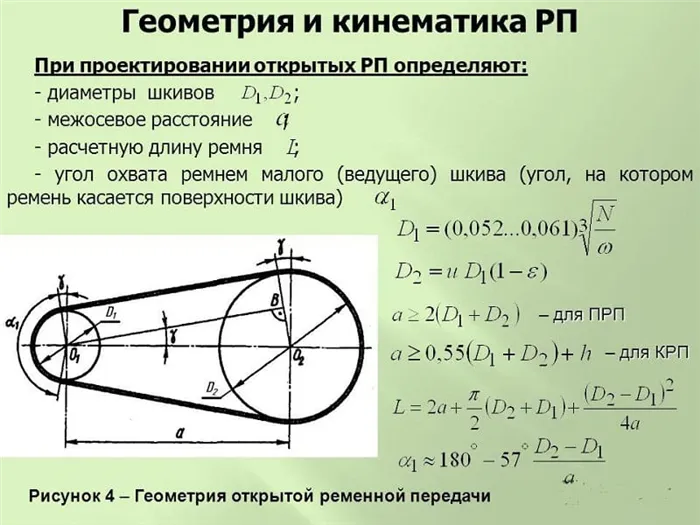
Диаметр шкивов зависит от частоты вращения вала и линейной скорости шкивов, согласно следующей формуле
где D1 — диаметр шкива, мм- V — линейная скорость шкива, м/с- n — частота вращения вала, об/мин.
Для шкива на валу электродвигателя со скоростью 1400 об/мин можно легко рассчитать, что минимальный диаметр шкива (повышающей передачи) при линейной скорости ремня 10 м/с составит примерно 136 мм.
Диаметр приводного шкива рассчитывается по следующей формуле
где D1 и D2 — диаметры главного и вторичного шкивов, мм- ε — скорость проскальзывания ремня, 0,007 … 0,02- n1 и n2 — скорость вращения главной и вспомогательной оси, равная об/мин.
Коррекцией скольжения можно пренебречь, поскольку значения коэффициентов скольжения слишком малы. Это означает, что приведенное выше уравнение принимает более простую форму.
Минимальное расстояние между осями шкивов (минимальное межосевое расстояние) составляет
где Lmin — минимальное межцентровое расстояние, мм-D1 и D2 — диаметры шкивов, мм-h — высота профиля ремня.
Чем меньше межцентровое расстояние, тем сильнее изгибается ремень во время работы и тем меньше срок его службы. Рекомендуется принимать межцентровое расстояние больше минимального значения Lmin, которое становится тем больше, чем ближе к единице коэффициент передачи. Во избежание чрезмерной вибрации не следует использовать ремни слишком большой длины. Кстати, максимальное межцентровое расстояние Lmax можно легко рассчитать по формуле:
Сборка двигателя завершена. Теперь приступайте к расчету шкивов для привода ремня машины. Немного терминологии по ременному приводу.
Основными входными данными, которые мы будем иметь, являются три значения. Первое значение — скорость вращения ротора (вала) электродвигателя 2790 оборотов в секунду. Вторая и третья — это скорости, которые должны быть достигнуты на вторичном валу. Нас интересуют два значения 1800 и 3500 оборотов в минуту. Таким образом, мы сделаем шкив двухступенчатым.
ノート! Мы будем использовать частотный преобразователь для запуска трехступенчатого электродвигателя, чтобы расчетные скорости были правильными. Если двигатель запускается с помощью конденсаторов, значения скорости вращения ротора будут отличаться от номинальной скорости на меньший процент. На этом этапе можно минимизировать ошибку, внеся коррективы. Но для этого необходимо запустить двигатель, использовать тахометр и измерить текущую скорость вращения вала.
Наши цели определены, теперь перейдем к выбору типа ремня и основным расчетам. Для каждого из имеющихся ремней, независимо от типа (шплинтовый ремень, шплинтовый ремень, многошплинтовый ремень или другой), существуют некоторые основные характеристики. Они определяют обоснованность применения в конкретной конструкции. Идеальным решением для большинства проектов является использование клиновидной ленты. Свое название полотно Poly-V получило благодаря конфигурации с длинными замкнутыми желобками по всей длине. Название происходит от греческого слова «поли», означающего «много». Эти канавки также называют ребрами или желобками. Количество канавок может варьироваться от трех до двадцати.
Рис. 1. Слева. Фрагмент из «Декреталий Григория IX». Примерно 1340 год. Справа. Мартен ван Хемскерк. Портрет женщины с прялкой. 1529 год
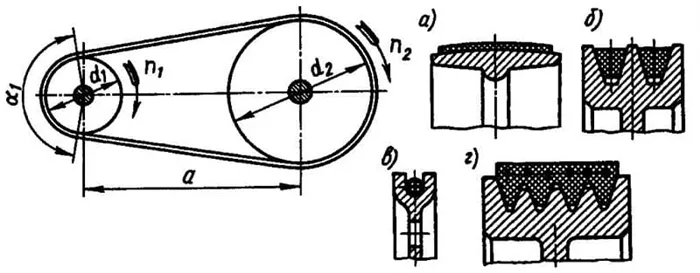
Устройство ременной передачи, ее характеристики
Ремень — это пара шкивов, соединенных бесконечной лентой. Эти приводные шкивы обычно установлены в одной плоскости, а валы параллельны, при этом приводные шкивы вращаются в одном направлении. Плоские (или круглые) ремни позволяют изменять направление вращения путем пересечения и взаимного расположения осей с помощью дополнительных пассивных роликов. В этом процессе теряется часть энергии.
Клиновидные ременные передачи имеют большую поверхность контакта с ременным шкивом благодаря клиновидному сечению. В шкиве образуется клиновидный паз.
Зубчатые ремни имеют равномерно расположенные и профилированные зубья на внутренней стороне ремня и на ободе. Они не проскальзывают, обеспечивая высокую передачу энергии.

Для расчета привода важны следующие основные параметры:
- число оборотов трансмиссионного вала,
- мощность, передаваемая двигателем
- число оборотов выходного вала,
- профиль, толщина и длина ленты,
- расчетный, внешний, внутренний диаметр колеса,
- профиль канавки (для ременной передачи)
- шаг шестерни (для зубчатого ремня)
- расстояние между осями,
Расчеты обычно проводятся в несколько этапов.
Основные диаметры
Для расчета шкивов и привода в целом используются различные диаметры, например, для ременного шкива:
Расчетный диаметр используется для расчета передаточного отношения, а наружный диаметр — для расчета размеров привода при сборке механизма.
Для передачи зубчатым ремнем Dрассчитано отличается от Dの中に на высоту зуба。Коэффициент передачи также рассчитывается из значения Dрассчитывается.
Для расчета планетарного движения, особенно при больших размерах обода относительно толщины профиля, Dрассчитано часто принимается равным внешнему диаметру обода.。
Расчет диаметра шкива
Сначала необходимо определить передаточное отношение, исходя из скорости вращения входного приводного вала n1 и требуемой скорости вращения выходного вала n2/:
Если двигатель с ведущим колесом уже имеется, рассчитайте диаметр шкива с учетом передаточного отношения i по формуле:
Если машина была разработана с нуля, то теоретически подходит любая пара ведущих колес, удовлетворяющая условию:
На практике ведущее колесо рассчитывается на основе:
- Размеры и конструкция приводного вала. Деталь должна быть прочно закреплена на валу, соответствовать размеру внутреннего отверстия, типу посадки и месту установки. Наименьший допустимый диаметр шкива обычно определяется из соотношения Dрассчитано ≥ 2,5 Dの中に
- допустимые размеры шестерни. При проектировании зубчатых передач важно соблюдать габаритные размеры. Чем меньше расстояние между осями, тем больше лента изгибается на ободе и тем больше изнашивается лента. Если межцентровое расстояние слишком велико, будут возникать продольные вибрации. Расстояние также определяется длиной ленты. Если не проектируется отдельный компонент, длину следует выбирать из стандартного диапазона.
- передаваемая мощность. Материал арматуры должен выдерживать угловые нагрузки. Это важно для высоких значений мощности и крутящего момента.
Окончательный расчет диаметра основывается на результатах расчетов размеров и мощности.
Передаточное отношение обозначается буквой i. Оно показывает, во сколько раз уменьшается крутящий момент на выходе. Согласно золотому правилу механики, сила (крутящий момент) увеличивается на тот же коэффициент.
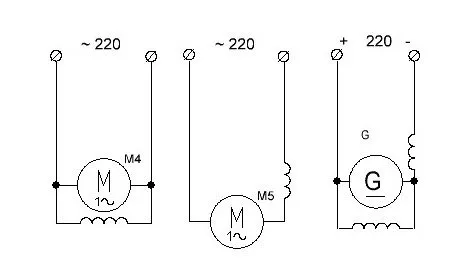
От сети
Однофазные двигатели переменного тока также позволяют управлять вращением ротора.
Коллекторные двигатели
Эти двигатели используются в электродрелях, лобзиках и других инструментах. Чтобы уменьшить или увеличить скорость, достаточно изменить напряжение питания, как и в предыдущих случаях. Существуют также решения для этой цели. Конструкция подключается непосредственно к электросети. Регулирующим элементом является симистор, который управляется динистором. Симистор установлен в теплоотводе, а максимальная мощность нагрузки составляет 600 Вт.
Если имеется подходящий LATP, его можно использовать для всех этих целей.
Двухфазный двигатель
Устройство, имеющее две обмотки, пусковую и рабочую, в принципе, является двухфазным двигателем. В отличие от трехфазного двигателя, он имеет возможность изменять скорость вращения ротора. Характеристика вращающегося магнитного поля не круговая, а эллиптическая, что обусловлено его конструкцией. Существует два варианта управления скоростью:
Такие устройства широко распространены в бытовом и промышленном применении.
Обычные асинхронные машины
Трехфазные электродвигатели, хотя и просты в эксплуатации, имеют определенные характеристики, которые необходимо учитывать. Если вы просто измените напряжение питания, крутящий момент изменится незначительно, но не более. Регулировка скорости в широком диапазоне требует достаточно сложного оборудования, которое сложно и дорого собрать и просто установить.
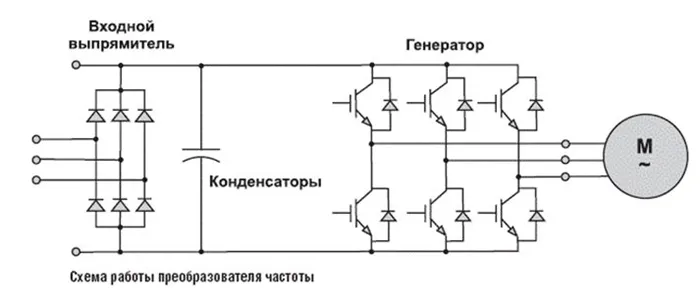
Для этого промышленность разработала частотные преобразователи, которые помогают изменять обороты двигателя в необходимом диапазоне.
Асинхронные двигатели увеличивают свою скорость в соответствии с параметрами, установленными в преобразователе частоты. Этот показатель может варьироваться в широком диапазоне. Инверторы — лучшее решение для таких двигателей.
Шкивы SPC чертежи и размеры
Скорость шкива = скорость вращения вала, на котором установлен этот шкив, передачу мощности (с ремнем) можно рассматривать как 95% от номинальной соответственно, передаточное число, и скорость вращения, диаметр используемого шкива. Момент — это противоположность речи. Это все приблизительные данные, но если вы хотите быть точным, скачайте программу и измерьте.
Легко. Идея заключается в том, чтобы заменить звездочку на звездочку. Из исходных данных вам нужны передаточные числа, мощность и крутящий момент на осях, а также колесная база. Затем введите все это благополучие сюда. Теперь вы закончили.
Работает с зубчатыми ремнями, клиновидными ремнями, многореберными ремнями и шкивами. Точно считайте соотношение шкива и ремня.
Рекомендуется. И наконец — скриншот программы! Просто нажмите на экран, чтобы увидеть, как это работает.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут существовать непрерывно или попеременно с последовательной, параллельной или смешанной стимуляцией (для переменного тока используются только первые два вида стимуляции).
Двигатели с коллекторами состоят из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через старые и курсорные обмотки, которые соединены определенным образом, создает магнитное поле, которое заставляет курсор вращаться. Напряжение передается на курсор с помощью щеток, изготовленных из мягких электрических проводников, обычно графита или медно-графитовой смеси. Если направление тока меняется на курсоре или статоре, вал начинает вращаться в противоположном направлении, и это всегда происходит при курсоре, так что ядро не переоценивается.
Если одновременно изменяются соединения курсора и статора, реверса не происходит. Существуют также трехфазные коллекторные двигатели, но это уже совсем другая история.
Двигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (обмотка статора) двигателя с параллельным возбуждением состоит из нескольких катушек тонкого провода, соединенных параллельно ротору, который имеет гораздо меньшее сопротивление обмотки. Поэтому в цепь ротора включен пусковой реостат для снижения тока при запуске двигателей мощностью более 1 кВт. Управление скоростью двигателя в этой схеме осуществляется путем изменения тока только в цепи статора. Это связано с тем, что метод снижения напряжения на клеммах не очень экономичен и требует использования регулятора большой мощности.
Если обмотка статора случайно повреждена таким образом при низкой нагрузке, частота вращения двигателя может превысить максимально допустимую, что приведет к недостаточной мощности двигателя.
Двигатели постоянного тока с последовательным возбуждением
Обмотки возбуждения двигателей этого типа имеют небольшое количество витков грубого провода, которые, будучи размещенными последовательно с цепью ротора, обеспечивают одинаковый ток для всей цепи. Эти двигатели более устойчивы к перегрузкам и поэтому наиболее часто используются в бытовых приборах.
Существует два способа регулирования скорости двигателя постоянного тока с помощью последовательно соединенных обмоток статора.
- Подключив к статору регулятор потока, двигатель может работать на статоре. Однако этот метод очень сложен в реализации и не используется в бытовой технике.
- Регулирование скорости с уменьшением (понижением) напряжения. Этот метод используется почти во всех приборах (бытовая техника, инструменты и т.д.).
Коллекторные двигатели переменного тока.
Эти однофазные двигатели менее эффективны, чем двигатели постоянного тока, но широко используются в бытовой технике и электроинструментах благодаря более простой конструкции и схемам управления. Их можно назвать «универсальными», поскольку они могут работать как от источников переменного, так и постоянного тока. Это происходит потому, что при подаче переменного напряжения направление магнитного поля и тока одновременно изменяется на противоположное относительно статора и ротора, не изменяя направления вращения. Реверс этих устройств достигается путем инвертирования концов ротора.