Однако не все чудеса и преимущества заключены в этом моторе, так как он более мощный, чем надежный, поэтому не так сбалансирован в этом смысле.
Гибридные шаговые двигатели NEMA 17 серии FL42STH
Шаговые двигатели FL42STH широко используются в аналитических приборах. Оптимальная геометрия зубчатой зоны ротора и статора обеспечивает высокочастотную характеристику шагового привода. Шаговый двигатель часто используется в качестве фрикционной муфты с высоким удерживающим моментом (удерживающий момент, создаваемый при отключении питания постоянными магнитами).
Двигатели NEMA 17 FL42STH используются в микроконтроллерах, позиционерах, устройствах подачи растворов, полуавтоматических мультиинструментальных устройствах, оборудовании для отбора проб, автоматических анализаторах, шейкерах и приборах для анализа нефти.
技術データ
Назад
| 商品名 | Рабочий ток/фаза | Рабочий ток/фаза Сопротивление/фаза | Индукция/фаза | Максимальный крутящий момент 1 | 長さ | Момент инерции ротора | 重さ | 回路図 | |
|---|---|---|---|---|---|---|---|---|---|
| Вал с одной стороны | Вал с обеих сторон | é | オーム | mGn | кг*см | んん | г*см 2 | кг | |
| FL42STH25-0404A | FL42STH25-0404B | 0,4 | 24 | 36 | 1,7 | 25 | 20 | 0,15 | 2 |
| FL42STH33-1334A | FL42STH33-1334B | 1,33 | 2,1 | 2,5 | 2,2 | 34 | 35 | 0,22 | 2 |
| FL42STH38-0406A 2 | FL42STH38-0406B 2 | 0,4 | 30 | 30 | 2,6 | 40 | 54 | 0,28 | 1 |
| FL42STH38-1684A | FL42STH38-1684B | 1,68 | 1,65 | 3,2 | 3,6 | 40 | 54 | 0,28 | 2 |
| FL42STH47-0406A 2 | FL42STH47-0406B 2 | 0,4 | 30 | 25 | 3,17 | 48 | 68 | 0,35 | 1 |
| FL42STH47-1206A | FL42STH47-1206B | 1.2 | 3.3 | 2.8 | 3,17 | 48 | 68 | 0,35 | 1 |
| FL42STH47-0806A | FL42STH47-0806B | 0,8 | 7,5 | 6,3 | 3,17 | 48 | 68 | 0,35 | 1 |
| FL42STH47-1684A | FL42STH47-1684B | 1,68 | 1,65 | 2.8 | 4,4 | 48 | 68 | 0,35 | 2 |
| FL42STH60-1206A | FL42STH60-1206B | 1.2 | 6 | 7 | 6.5 | 60 | 102 | 0,5 | 1 |
Вперед
1 Максимальный квазистатический синхронизирующий момент
2 Квазистатическое напряжение питания 12 В
Размеры и соединения шаговых двигателей FL42STH
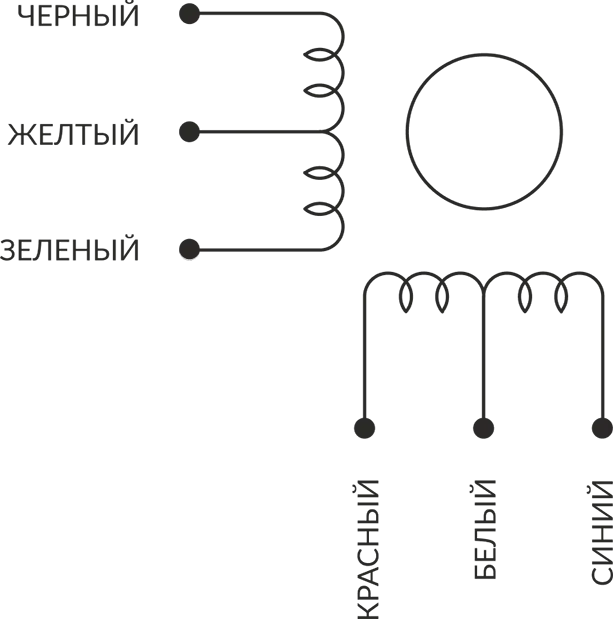
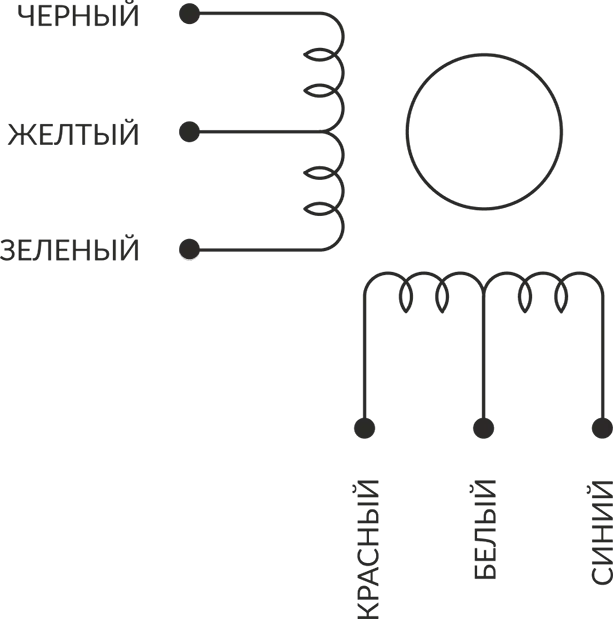
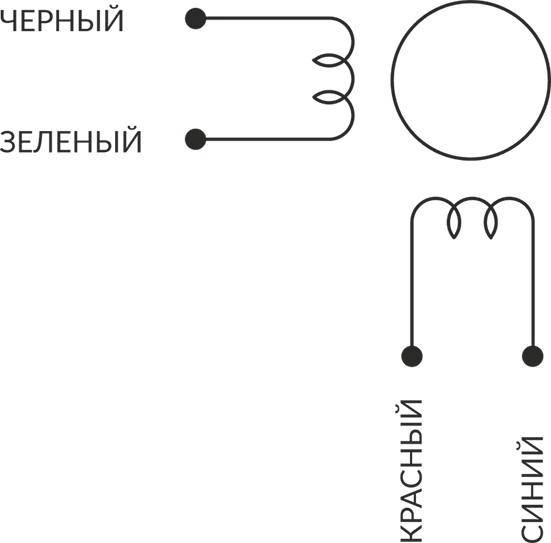
Электрическая схема шаговых двигателей FL42STH
Здравствуйте, Евгений. Некоторые модели шаговых двигателей FL42STH выпускаются в двух вариантах: с базовым шагом 1,8 градуса и 0,9 градуса. Двигатели с шагом 0,9 градусов маркируются буквами MA или MB. Например: FL42STH47-1684MA. Для получения информации о наличии и стоимости, пожалуйста, свяжитесь с нашим отделом продаж.
Nema 17: все о шаговом двигателе, совместимом с Arduino

Мы уже проанализировали все шаговые двигатели, которые вы можете использовать в своих проектах Arduino, но есть один из этих двигателей, который выделяется среди других моделей, таких как Nema 17, поскольку это очень дорогой двигатель с множеством применений, например, для замены поврежденного двигателя в некоторых 3D-принтерах.
С помощью этого шагового двигателя вы сможете управлять вращением его вала с большой точностью, чтобы совершать точные движения и таким образом управлять движением вашей машины или робота. И в этом руководстве вы можете получить всю необходимую информацию, чтобы лучше узнать его и начать работать с ним.
Технические характеристики Nema 17
Шаговый двигатель Nema 17 — это биполярный двигатель с углом шага 1,8°, что означает, что он может разделить каждый оборот или поворот на 200 шагов. Каждая внутренняя обмотка поддерживает ток 1,2 А при напряжении 4 В, что позволяет получить значительное усилие 3,2 кг/см.
Кроме того, этот двигатель Nema 17 надежен. Именно поэтому он используется в таких приложениях, как домашние 3D-принтеры и другие роботы, которым требуется значительное постоянство. Примером принтеров, использующих этот двигатель в качестве основы для своих приводов, является Prusa. Он также используется в лазерных резаках, станках с ЧПУ, машинах для подбора и размещения и т. д. Д.
Однако не все чудеса и преимущества заключены в этом моторе, так как он более мощный, чем надежный, поэтому не так сбалансирован в этом смысле.
Вкратце спецификации выглядят следующим образом
- Шаговый двигатель.
- Модель NEMA 17.
- Вес 350 гм.
- Размер 42,3×48 мм без вала
- Диаметр вала 5 мм d
- Длина вала 25 мм
- 200 шагов за оборот (1,8º/шаг)
- Ток 1,2 А на обмотку
- Напряжение питания 4 В
- 3,3 Ом на катушку
- 3,2 кг/см Крутящий момент двигателя
- Индуктивность на катушку 2,8 мгн
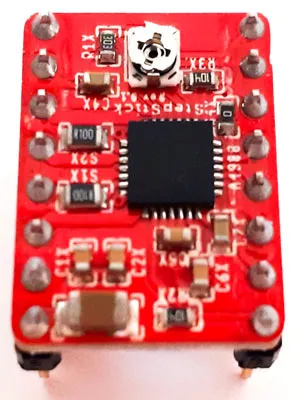
Расположение выводов и спецификация
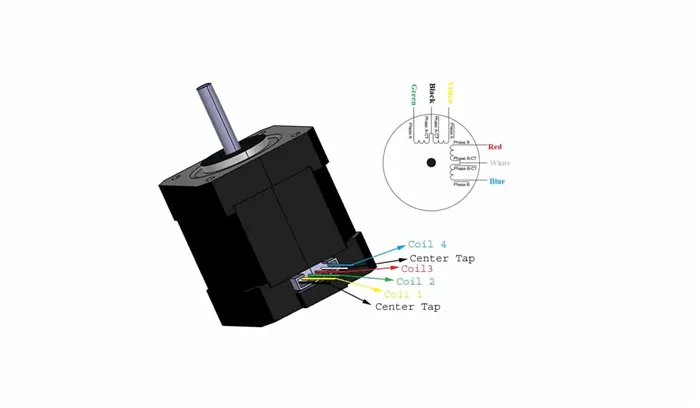
Эл. распиновка этих шаговых двигателей очень проста, поскольку для подключения требуется не так много проводов. Есть также разъемы, которые можно подключить; в случае Nema 17 распиновка похожа на ту, что вы видите на изображении выше.
Однако, если вам нужно знать больше технических и электрических деталей об ограничениях и диапазоне, в котором может работать NEMA 17, вы можете найти диаграмму шагового двигателя, чтобы получить всю необходимую дополнительную информацию. Пример в формате PDF можно скачать здесь.
Где купить и цены
Вы можете найти их по низким ценам в различных специализированных магазинах электроники и интернет-магазинах. Например, вы можете найти их на Amazon. Они поставляются от различных производителей и предлагаются в различных форматах продажи, например, в упаковках по три или более штук, если вам нужно несколько штук для вашего мобильного робота и т.д. d. Вот несколько отличных предложений.
Пример того, как начать работу с Nema 17 и Arduino
Вот простой пример того, как можно построить эту простую схему, используя Arduino с шаговым двигателем Nema 17. Мы использовали драйвер двигателя DRV8825, но вы можете использовать другие шаговые двигатели, если хотите изменить конструкцию и адаптировать ее к своим потребностям. То же самое относится и к коду эскиза. Этот параметр может быть изменен по мере необходимости.
Что касается драйвера, то он идеально подходит для малых и средних шаговых двигателей или шаговых двигателей типа NEMA 17 bipolar, поскольку при использовании выдерживает напряжение 45 В и ток 2 А. Однако, если вам нужно что-то более «тяжелое», более крупный двигатель, например, Nema 23, вы можете использовать драйвер TB6600.
Не забывайте, что вы также можете использовать лучшие возможности управления с помощью библиотеки Accelstepper. Библиотека, написанная Майком Макколи, очень практична для проектов и поддерживает ускорение и замедление, что является большим преимуществом для многих функций.
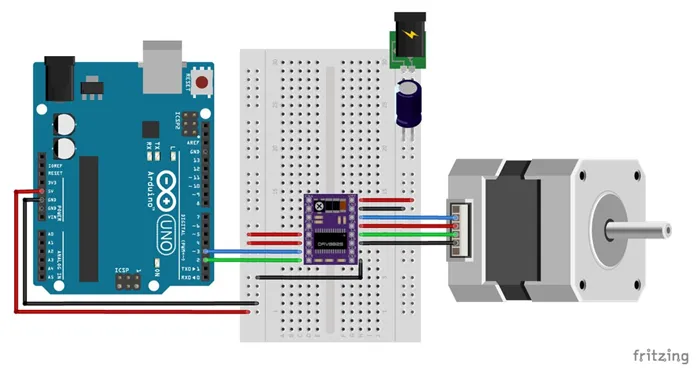
Соединения LAS обобщены следующим образом
- Двигатели NEMA 17 имеют соединения GND и VMOT с источником питания. Это показано на рисунке с изображением компонентов, где изображены луч и конденсатор. Источник требует напряжения 8-45 В, а добавленный мной конденсатор может быть 100 мкФ.
- Две катушки шагового двигателя подключены к A1, A2, B1 и B2 соответственно.
- Контакт GND драйвера подключен к GND Arduino.
- Контакт VDD драйвера подключен к 5 В Arduino.
- STP и Dir для Step и Direction подключены к цифровым контактам 3 и 2 соответственно. Если выбраны другие контакты Arduino, код должен быть изменен соответствующим образом.
- RST и SLP для сброса и сна драйвера должны быть подключены к 5 В платы Arduino.
- В этом случае вывод EN или активации может быть отключен, чтобы драйвер был активен. Если установить высокий, а не низкий уровень, драйвер будет отключен.
- Другие контакты будут отключены.
Что касается скетч-кода, то очень легко заставить Nema 17 работать и приступить к работе.
Для получения дополнительной информации смотрите раздел Курсы программирования в Arduino IDE hwlibre.
Содержание статьи соответствует этическим нормам нашей пенсии. Чтобы сообщить об ошибке, нажмите здесь.
Полный путь к статье: бесплатный материал ‘электронные компоненты’ NEMA 17: все совместимо с Arduino stem
С помощью этого шагового двигателя вы сможете управлять вращением его вала с большой точностью, чтобы совершать точные движения и таким образом управлять движением вашей машины или робота. И в этом руководстве вы можете получить всю необходимую информацию, чтобы лучше узнать его и начать работать с ним.
Модуль драйвера шагового двигателя A4988
Шаговый — Шаговый привод управляет движением шагового двигателя, подавая различные фазы мощности в требуемое время.
Шаговый привод A4988 предназначен для управления работой шаговых двигателей NEMA 17 и других подобных биполярных шаговых двигателей. Устройство имеет встроенный преобразователь, который позволяет управлять скоростью и направлением вращения шагового двигателя с помощью небольшого количества контактов.
Для управления шаговиком NEMA 17 требуется только два шипа A4988 — шаг (для управления шагом) и направление (для управления направлением двигателя).
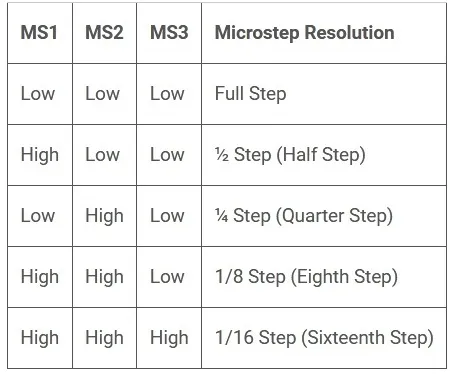
Драйвер двигателя A4988 может управлять работой шагов в пяти различных режимах работы: полный шаг, половина шага, четверть шага, 1/8 шага и 1/16 шага. Режим выбора режима (MS1, MS2, MS3) может быть использован для выбора необходимого режима шага. На следующей схеме приведена таблица выбора нужного шага работы с помощью этих клемм.
Технические элементы привода двигателя A4988:.
- Максимальное рабочее напряжение: 35 В,.
- Минимальное рабочее напряжение: 8 В,.
- Максимальный ток на фазу: 2a,.
- Функция: полный шаг, ½ шага, ¼ шага, 1/8 шага, 1/16 шага.
- Защита от обратного напряжения: нет,.
- Размеры: 0,5 x 20,5 мм (0,6″ x 0,8″).
Различия между драйверами двигателя DRV8825 и A4988
Оба этих драйвера двигателя управляют шаговиками NEMA 17 и имеют схожие клеммы и применения, но отличаются по бактериям, рабочему напряжению и т.д. Основные различия между этими двигательными установками следующие
- Блок DRV8825 поддерживает шесть ступенчатых функций, в то время как блок A4988 — только пять.
- У DRV8825 минимальная длительность шага составляет 1,9 миллисекунды, у A4988 — 1 миллисекунда, и
- Без дополнительного охлаждения DRV8825 обеспечивает немного больший ток, чем A4988.
- Положение потенциометра, управляющего пределом тока, отличается в двух устройствах.
- DRV8825 можно использовать с более мощными источниками питания.
- Спящий вывод на DRV8825 не установлен в режим подтягивающего резистора по умолчанию, как в случае с A4988.
- DRV8825 имеет выходную клемму вместо клеммы напряжения питания.
Схема проекта
На следующей схеме показана схема управления ступенями Nema 17 с помощью Arduino и драйвера A4988.
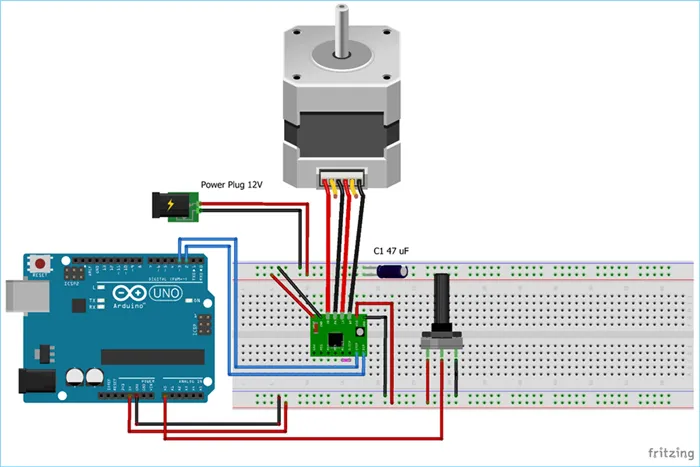
Поскольку модуль драйвера A4988 имеет встроенный транслятор (преобразователь), вам нужно только подключить контакты Step и Direction к плате Arduino. Контакт Step используется для управления шагами двигателя, а контакт Direction — для управления направлением движения двигателя. Шаговый двигатель питается от источника питания 12 В, а модуль A4988 — от платы Arduino. Потенциометр используется для управления направлением вращения двигателя.
Если вы повернете потенциометр по часовой стрелке, шаговый двигатель будет вращаться по часовой стрелке. Если вы повернете потенциометр против часовой стрелки, шаговый двигатель также будет вращаться против часовой стрелки. Для защиты платы Arduino от скачков напряжения используется конденсатор 47 мкФ. Клеммы MS1, MS2 и MS3 остаются отключенными, что означает, что драйвер будет работать в режиме полного шага.
Внешний вид собранного дизайна проекта показан на следующем рисунке.
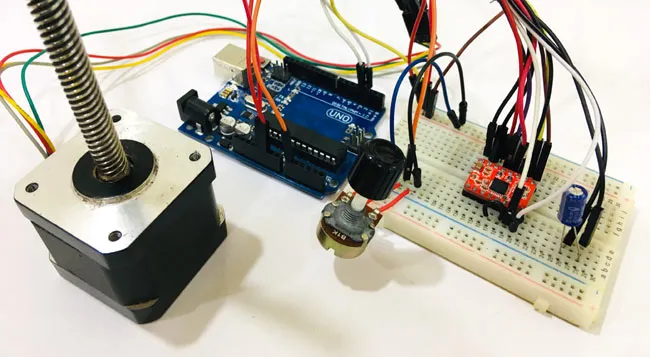
Таблица соединений для платы Arduino, шагового двигателя Nema 17 и модуля драйвера двигателя A4988 выглядит следующим образом.
| штифт A4988 | 繋がり |
| VMOT | +в от батареи |
| GND | -VDOT +ve батареи |
| VDD | 5 В Arduino |
| GND | GND от Arduino |
| STP | Контакт 3 Arduino |
| DIR | Контакт 2 Arduino |
| 1A, 1B, 2A, 2B | шаговый двигатель |
Обратите внимание на полярность источника питания.
こんにちは。 Не могли бы вы уточнить FL42STH47-1684A, его шаг не 0.9 градусов? Я только что нашел этот предмет в интернете. Это двигатели CW-Motor, не так ли?
Шаговый двигатель сильно вибрирует
При вращении ротора двигатель сильно вибрировал. О бесперебойной работе не могло быть и речи. Google снова приходит на помощь. Моей первой мыслью было, что обмотки подключены неправильно. Чтение спецификации шагового двигателя и различные форумы убедили меня, что проблема не в этом. Если обмотки подключены неправильно, двигатель просто не будет работать. Решение проблемы было в эскизе.
Оказалось, что существует отличная библиотека для шаговых двигателей, написанная ребятами из Adafruit. Мы использовали библиотеку AcclStepper, и шаговый двигатель начал работать плавно, без излишней вибрации.







