Деление общего количества гнезд в сердечнике на количество гнезд, занятых компонентами катушки (квант), дает количество полюсов. Когда это значение известно, можно определить скорость асинхронного двигателя.
Как определить число пар полюсов асинхронного двигателя, как узнать обороты электродвигателя в домашних условиях?
Иногда в своей практике я сталкивался с проблемами, связанными с асинхронными двигателями — как определить скорость вращения ротора двигателя, если нет этикетки двигателя и технической документации?
На самом деле эту проблему легко решить. Скорость можно определить по катушке обмотки статора индукторного двигателя.
По числу оборотов асинхронные двигатели делятся на 1000 об/мин, 1500 об/мин и 3000 об/мин. Когда асинхронные двигатели называют «тысячелетними», следует помнить, что их скорость не составляет 1000 об/мин, поскольку они асинхронные (ротор отстает от магнитного поля). Есть 940 об/мин, 980 об/мин и т.д., но не 1 000 об/мин. То же самое относится к «1500 об/мин» (1440-1480 об/мин) и «300 об/мин» (2940-2980 об/мин).
Параметры электродвигателя: таблица
| Имя параметра | Единица измерения | Примечания |
| Тип | ||
| Номинальная мощность | Киловатт | |
| Номинальный ток | ампер | Для 3-фазных двигателей в соответствии с подключением обмотки |
| Рейтинговая тенденция | Вольт | |
| Коэффициент мощности (коэффициент полезного действия) | ||
| Выход (cos ϕ) | % (%) | |
| Номинальная скорость вращения | Количество выстрелов в минуту |
Однако символы могут отсутствовать или быть неразборчивыми. В процессе эксплуатации двигатели окрашиваются несколько раз, часто вместе с фирменной табличкой. Поэтому их следует измерять.
Расчет количества оборотов асинхронного двигателя
Поскольку типичными двигателями в станках и подъемном оборудовании являются двигатели с короткозамкнутой клеткой, необходимо рассмотреть пример расчета. Напряжение сети подается на обмотки статора. Обмотки смещены на 120°. Результирующие индуцированные электромагнитные поля создают токи в обмотках. Ротор начинает работать под воздействием ЭМС.
Читайте также: Институциональный порядок отключения электроэнергии для садоводческих культур из-за неуплаты в 2020 году
Основной характеристикой двигателя является количество оборотов в минуту. Рассчитайте эту цену:.
где f — частота сети, герц, а p — число полюсов (пар) статора.
На корпусе двигателя имеется табличка с техническими данными. При отсутствии таких данных для расчета частоты вращения вала двигателя можно использовать другие имеющиеся данные. Расчеты можно производить тремя способами.
- Используйте эту таблицу для расчета количества витков при различных схемах напряжения.
- Рассчитайте рабочую скорость с шагом в диаметр намотки, используя следующее уравнение
2 p = Z 1 / y, где 2p — число полюсов, Z 1 — число пазов статора, а y — шаг обмотки.
Выберите соответствующую частоту вращения двигателя из таблицы.
2p = 0,35 Z 1 б/ч или 2p = 0,5 D i / ч, где
где 2p — количество полюсов, Z 1 — количество прорезей, b — размер зуба, см, h — высота спинки, см, D i — диаметр зуба, см.
На основании расчетов и индукции рассчитывается количество витков и сравнивается со значением двигателя согласно паспорту.
Скорость асинхронного двигателя почти всегда интерпретируется как скорость ротора. Точное значение обычно указывается на табличке на боковой стороне корпуса двигателя. Он выражается в оборотах в минуту.
Принцип работы трехфазных асинхронных двигателей
Вы уже читали об устройстве асинхронных двигателей и не будем повторяться. Если вам интересно, перейдите по ссылке и прочитайте следующее.
При подключении асинхронного двигателя к сети обмотки должны быть соединены звездой или треугольником. Если клеммы на клеммной колодке не обозначены, вы должны самостоятельно определить начало и конец обмотки двигателя.
При подключении обмотки статора асинхронного двигателя к трехфазному источнику переменного тока образуется вращающееся магнитное поле статора со скоростью вращения n1. Скорость вращения определяется следующим уравнением
Это вращающееся магнитное поле в статоре пронизывает обмотки статора и ротора и индуцирует в них ВЭД (E1 и E2). Самовозбуждающийся индуктор (E1) индуктируется в обмотке статора в направлении, противоположном приложенному сетевому напряжению, и ограничивает величину тока в обмотке статора.
Как известно, ток в обмотке статора индуцируется АЦП ротора (E2), поскольку обмотка ротора замыкается накоротко в случае двигателей с короткозамкнутым ротором и через резистор в случае двигателей с фазным ротором. Взаимодействие между индуктированным током в катушке ротора и вращающимся магнитным полем статора создает электромагнитную силу Fem.
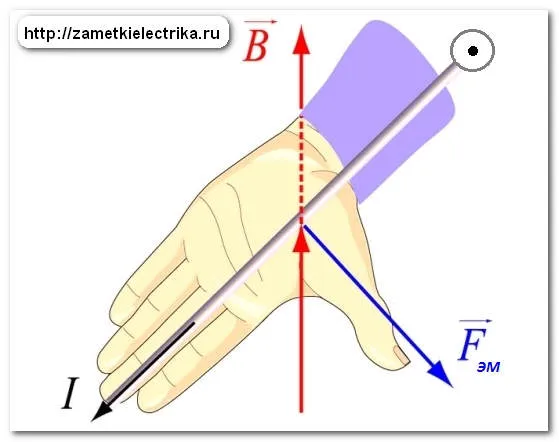
Направление электромагнитной силы в Fem можно легко найти, используя правило левой руки.
Правило левой руки для определения направления электромагнитной силы
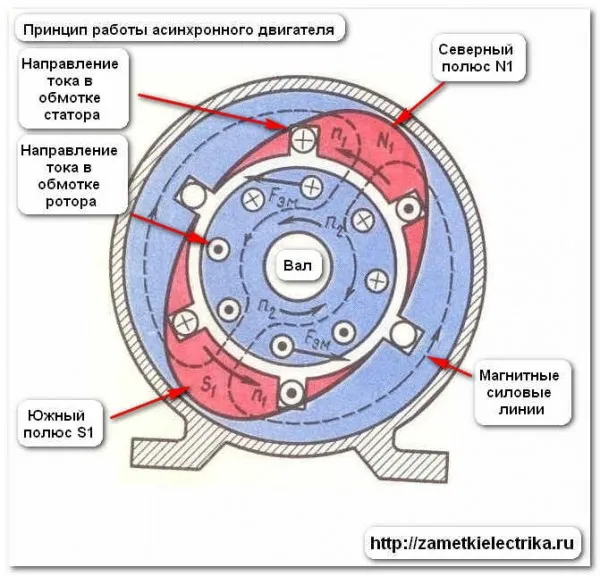
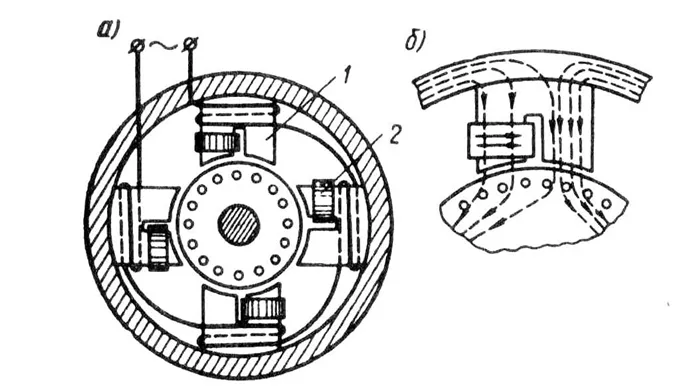
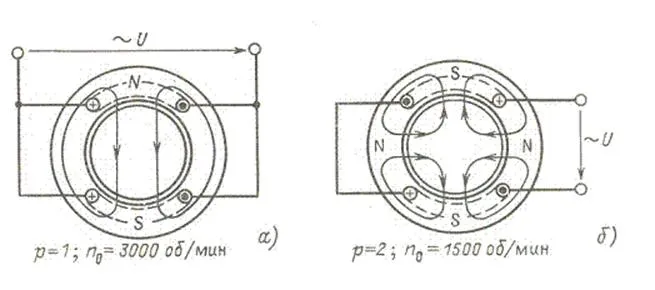
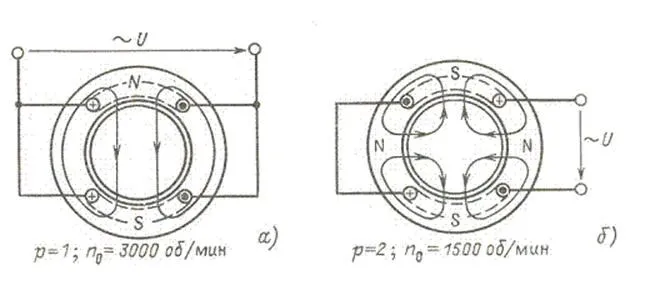
Следующая схема иллюстрирует принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в данный период называются N1 и S1. В этом случае эти полюса вращаются против часовой стрелки. А в другое время они будут находиться в разных пространственных положениях. Это означает, что время зафиксировано и отображается следующее изображение.
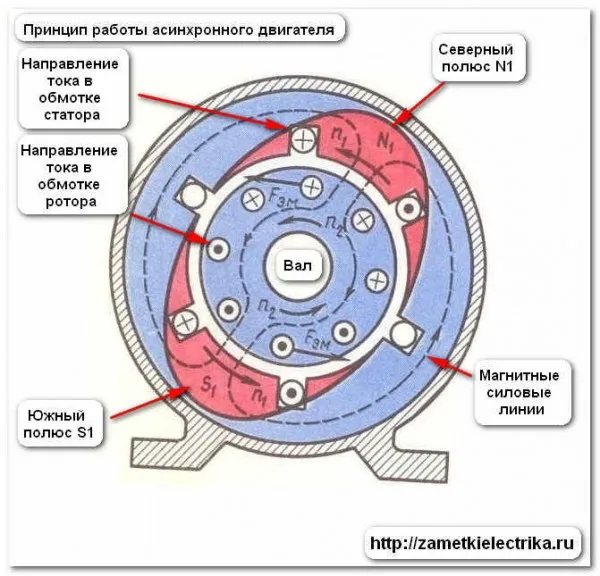
Токи в обмотках статора и ротора представлены крестиками и точками. Позвольте мне объяснить. Если есть крест, это означает, что ток в этой обмотке направлен нами. И наоборот, если есть точка, то это означает, что ток в этой обмотке направлен нами. Пунктирной линией показаны линии магнитного поля вращающегося магнитного поля статора.
Поместите ладонь так, чтобы линии магнитного поля находились на вашей ладони. Четыре вытянутых пальца должны вести вдоль направления тока обмотки. Выдвинутый большой палец указывает направление электромагнитной силы Fem для конкретного токопровода.
На этой диаграмме показаны только две силы Fem, создаваемые проводником ротора в направлении тока от нас (X) и к нам (Dot). И, как мы видим, электромагнитные силы Fem пытаются повернуть ротор в сторону вращающегося магнитного поля статора.
Иллюстрация для определения электромагнитной силы Fem проводника с током, направленным (пересекающимся) от нас.
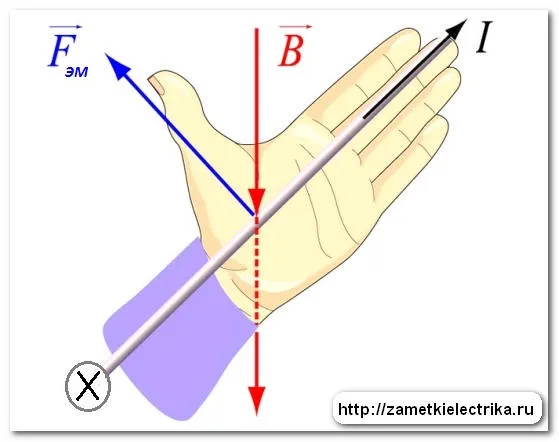
Иллюстрация для определения электромагнитной силы Fem проводника с током (точка).
Сумма этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент M, который перемещает вал электродвигателя с частотой n.
Отсюда и название — асинхронный двигатель. Частота n ротора всегда ниже частоты вращения магнитного поля статора n1. Другими словами, он отстает. Термин «проскальзывание» введен для определения времени запаздывания, которое рассчитывается по следующему уравнению
Пример расчета оборотов двигателя.
Например, имеется двигатель AIR71A4U2 мощностью 0,55 (кВт).
- Количество пар полюсов равно 4 (2p = 4, p = 2)
- Скорость вращения ротора составляет 1360 (об/мин)
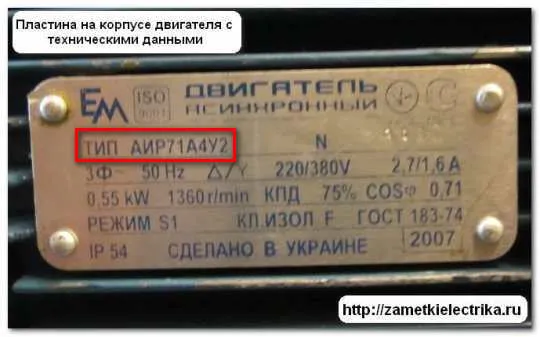
Определите статическую скорость возбуждения этого двигателя при частоте сети 50 (Гц).
Найдите размер скольжения этого двигателя:.
Кстати, направление вращения поля статора и, следовательно, вала двигателя может быть обратным. Это делается путем переключения двух любых проводников трехфазного питающего напряжения. Это объясняется в статье о реверсе двигателя и чередовании фаз.
1.Современные асинхронные электродвигатели делятся на три группы, каждая из которых представляет собой отдельные обороты ротора в минуту. Первая группа — это электродвигатели, вращающиеся со скоростью 1 000 оборотов в минуту. Сразу отметим, что эта цифра несколько преувеличена, поскольку двигатели асинхронные.
Полюса
Статор электродвигателя имеет различные пары катушек (p), подключенных к сетевому напряжению с определенным значением частоты (f). Статор создает магнитное поле и синхронно вращается во время работы. Его рабочая скорость точно соответствует частоте сети и рассчитывается по формуле n s = 60f/p.
Магнитное поле создает напряжение в сепараторе ротора (сжатый лист катушки из меди или алюминия). Генерируемый ток и поток магнита заставляют якорь вращаться. Если курсор вращается с синхронной скоростью, курсор не вращается относительно поля, отображаемого на статоре. В якоре не создается напряжение, и сила вращения ротора уменьшается.
Поэтому вал асинхронного двигателя всегда вращается с асинхронной скоростью относительно функции статора МП. Разница между этими скоростями называется скольжением и обычно составляет от 3 до 5 %.
Отличия от современных скоростей напрямую связаны с типом конструкции двигателя и его характеристиками. Все эти моменты подробно рассмотрены ниже.
Регулировка скорости работы мотора
Многие люди спрашивают: — Зачем мне нужно знать количество пар полюсов? Первое, что легко сделать с этими данными, это отрегулировать скорость вращения асинхронного двигателя.
В современной обрабатывающей промышленности используется довольно широкий спектр промышленного оборудования для выполнения конкретных задач. Пока список передач ограничен (только самые важные и наиболее часто используемые), нет необходимости плавно регулировать скорость вращения. Станки в металлургической и деревообрабатывающей промышленности, лебедки в добывающих скважинах, центрифуги и т.д. Примеры оборудования такого типа.
Ограниченное количество рабочих скоростей может быть легко достигнуто с помощью короткозамкнутого многоскоростного двигателя (с экранированным полюсом). Две версии могут использоваться одновременно.
- С обмотками статора, поддерживающими функцию переключения, для одновременной работы разных пар полюсов.
- Используйте разные обмотки статорного элемента, расположенные в одном гнезде.
Взаимодействие между МДС наездника и элемента статора происходит только тогда, когда число пар обмоток этих двух элементов абсолютно одинаково. Поэтому при изменении числа пар полюсов статора необходимо изменить и число пар полюсов курсора.
Для асинхронных агрегатов с фазным усилением для выполнения этого требования требуется вспомогательное контактное кольцо. Эта особенность способствует увеличению внешних размеров конструкции и, соответственно, стоимости.
Арматура с короткозамкнутой сепараторной обмоткой обладает способностью автоматически генерировать набор пар, равных по списку, но уже имеющих движущую силу статора. Эта особенность требует использования короткозамкнутых якорей в асинхронных двигателях, работающих на нескольких скоростях.
Многоскоростные силовые агрегаты с большим количеством катушек в статоре одновременно уступают однообмоточным моделям. Это выражается в бюджете и технологиях. Многокатушечные устройства используют очень мало обмоток статора и неэффективно используют пазы. Выход и cosϕ на порядок ниже оптимальных значений.
Эта важная особенность означает, что в производстве все чаще используются однообмоточные электродвигатели. Это выгодно, поскольку агрегаты поддерживают одновременное прохождение различных количеств пара.
По сути, изменяя направление тока в зоне обмотки, параллельно изменяется магнитная движущая сила в центре отверстия статора. В результате изменяется скорость вращения MDS, что, в свою очередь, изменяет сам поток. Наиболее распространенным методом является переключатель с соотношением один к двум, где каждая фазная обмотка создается в виде двух сфер. Изменив направление тока в одном из них, можно удвоить требуемое изменение объема полюса.
Для большей информативности вот пример этой энергии в двигателе, имеющем восемь и четыре точки.
Определение точного количества
Мы уже обсуждали, как количество пар полюсов в двигателе может быть использовано для регулировки скорости. Но как самостоятельно определить точное количество этих пар?
Скорость асинхронного двигателя почти всегда интерпретируется как скорость ротора. Точное значение обычно указывается на табличке на боковой стороне корпуса двигателя. Он выражается в оборотах в минуту.
Трехфазные блоки питания поддерживают возможность однофазного питания, но для реализации этой идеи необходимо подключить конденсатор. При этом необходимо учитывать уровень напряжения сети, а также использовать одну или несколько обмоток одновременно. Это не должно оказать существенного влияния на конструкцию двигателя.
Если под нагрузкой ротор вращается 2760 раз в минуту, его угловая частота составит 289 рад/с. Это довольно легко рассчитать.
Получившаяся форма является более технической и неудобной для понимания рядовым пользователем. По этой причине показатели работы двигателя просто и понятно описываются в оборотах в минуту.
Уровень настроенной частоты вращения таких двигателей (без учета таких важных величин, как скольжение) равен 3000 об/мин. Это связано с тем, что частота питающей сети пусковой обмотки составляет 50 Гц. Магнитный поток, действующий каждую секунду, совершает полное изменение на 50. Исходя из этого, 50 * 60 = 3 000. полученное значение является синхронной скоростью асинхронных типов двигателей.
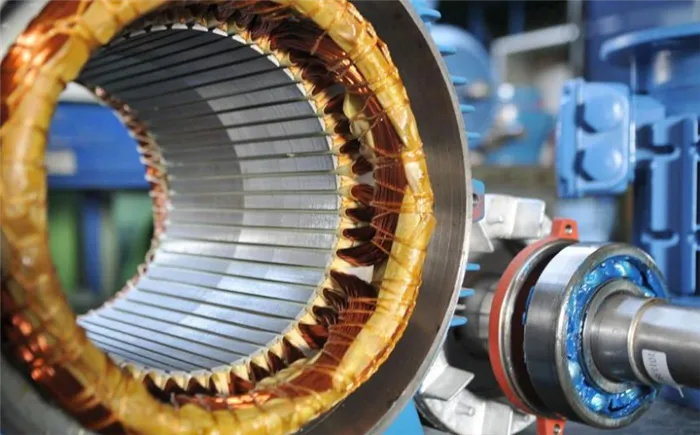
Далее мы рассмотрим другой метод определения уровня частоты вращения условного трехфазного агрегата путем визуального осмотра статора. Оценив внешний вид неподвижной части, расположение медных обмоток и точное количество пазов, можно с легкостью определить скорость вращения двигателя. Это особенно полезно, если измерительное устройство, такое как тахометр, недоступно.
3000 об/мин
Современные электронные системы указывают, что каждая конкретная модель электродвигателя имеет 1-4 пары пазов в зависимости от типа конструкции.
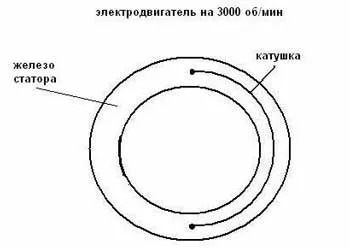
Минимальное значение — 1 пара и, соответственно, 2 полюса. На рисунке видно, что статор включает в себя 2 обмотки, каждая из которых отдельно установлена в свой отдельный паз и поочередно подключена во всех фазах. Для каждой пары обмоток они располагаются друг напротив друга. Они образуют отдельную пару в неподвижном элементе двигателя (статоре).
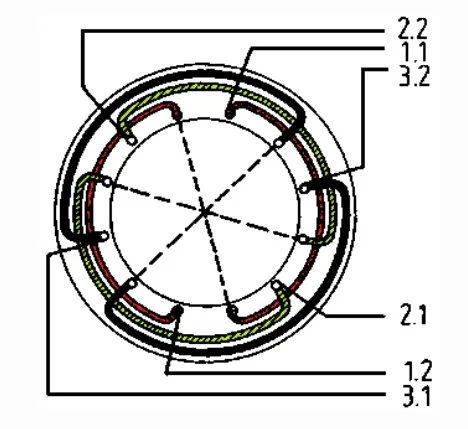
Для наглядности одна фаза выделена красным цветом, вторая — зеленым, а третья — черным. Все они структурно устроены одинаково. Эти обмотки подаются последовательно, так что за 1 такт (максимум из 50) магнитная цепь сделает один оборот по кругу (следовательно, 360˚). 1 оборот делается за 1/50 секунды, и, исходя из этого, 50 оборотов будут сделаны за 1 секунду. А 50, умноженные на 60, дадут 3000 оборотов в минуту, как уже было написано ранее.
Нетрудно догадаться, что для точного подсчета числа синхронных оборотов силового агрегата достаточно сосчитать пары полюсов двигателя. Это делается очень просто: откройте крышку и оцените статор.
Исходя из условий нагрева ротора (если пренебречь условиями флаттера), ток (I2), работающий с несколькими парами полюсов, всегда должен быть на одном уровне. Косинус угла Ψ2 должен быть как можно ближе к значению 1 от пустой нагрузки до номинального крутящего момента.
Трехфазный асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором — это асинхронный двигатель, в котором обмотка ротора соединена с контактным кольцом 1.
До широкого применения преобразователей частоты асинхронные двигатели средней и большой мощности выпускались с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (ADFM) обычно используются для тяжелых условий запуска, например, в качестве кранового двигателя переменного тока, или для привода устройств, требующих нестационарного регулирования скорости.
ADFR
Фаза ротора
位相ランナーは、本質的に3相ラッピング(ステーターラッピングに似ています)で、位相コアのスロットに挿入されます。このカーソルラップのフェーズの端は一般に星に取り付けられており、スタートはシャフトによって絶縁されたスリップ挿されたリング接点に関連付けられています。通常、3相の開始または調整Rheumatoがスリップリングに取り付けられています。非同期位相型エンジンは、短絡モーターよりも複雑ですが、開始および制御機能が向上しています。
Статор ADFR
Статор асинхронного двигателя с короткозамкнутым ротором по конструкции не отличается от статора короткозамкнутого двигателя.
Определение выводов вспомогательной обмотки для трехфазного ADFR
| Схема подключения обмоток, обозначение фаз и выходов | Обозначение выхода | |
|---|---|---|
| Начало | 終わり | |
| Разомкнутая цепь (количество проводников 6) | ||
| 第1段階 | K1 | K2 |
| вторая фаза | L1 | L2 |
| третий этап | M1 | M2 |
| Соединение звездой (количество проводников 3 или 4) | ||
| 第1段階 | k | |
| вторая фаза | l | |
| третий этап | m | |
| Starpoint (нулевая точка) | Q | |
| Дельта-подключение (3 провода) | ||
| Первая зацепка | k | |
| Второй ведущий | l | |
| Третий ведущий | m | |
Обозначение выводов обмотки ротора для трехфазных машин, ранее разработанных и модернизированных в соответствии с ГОСТ 26772-85
| Схема подключения обмоток, обозначение фаз и выходов | Обозначение выхода | |
|---|---|---|
| Соединение звездой (количество выходов 3 или 4) | ||
| 第1段階 | Р1 | |
| вторая фаза | Р2 | |
| третий этап | Р3 | |
| Нулевая точка | 0 | |
| Дельта-подключение (3 провода) | ||
| Первая зацепка | Р1 | |
| Второй ведущий | Р2 | |
| Третий ведущий | Р3 | |
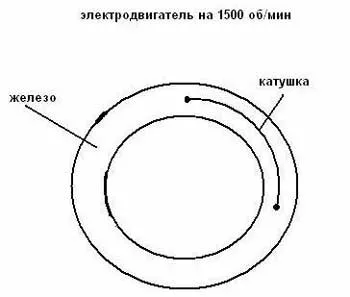
Если размер катушки покрывает примерно одну треть самого кольца, то двигатель относится ко второй группе и скорость вращения двигателя не будет превышать 1500 оборотов в минуту.
Асинхронные машины. История создания и область применения асинхронных двигателей. Процессы в асинхронной машине , страница 9
В целом, эти двигатели обладают более жесткими механическими свойствами, увеличенным пусковым моментом и меньшей кратностью пускового тока по сравнению с обычными сепараторными двигателями.
Работа многих механизмов с приводом от асинхронных двигателей в соответствии с техническими требованиями требует регулировки скорости вращения этих механизмов. Метод регулировки частоты (скорости) вращения асинхронных двигателей выявляет следующие соотношения: скорость вращения асинхронного двигателя равна частоте вращения асинхронного двигателя.
Таким образом, скорость вращения ротора можно регулировать в зависимости от нагрузки, подаваемой на вал.
- За счет изменения скольжения ;
- Путем изменения количества пар полюсов.
- Путем изменения частоты источника питания.
12.1 Замена слипов.
Этот метод используется для привода механизмов, оснащенных асинхронными двигателями с фазно обмотанными роторами. Например, в приводах подъемно-транспортных машин. В цепь ротора с фазной обмоткой вставляется реостат. Увеличение эффективного сопротивления ротора не влияет на критический момент, но увеличивает критическое скольжение (рис. 2.21).
На рисунке 2.21 показаны механические характеристики асинхронного двигателя при различных сопротивлениях реостата Rр3> Rр2> 0, Rр1= 0.
Как видно из рис. 2.21, этот метод позволяет осуществлять широкое управление скоростью нисходящего потока. Основные недостатки этого метода:.
- Эффективность снижается из-за высоких потерь в управляющем реостате. Это означает, что данный метод неэкономичен.
- Повышенное эффективное сопротивление ротора смягчает механические свойства асинхронного двигателя. Это означает, что стабильность работы двигателя снижается.
- Плавная регулировка скорости невозможна.
Из-за указанных недостатков этот метод используется для кратковременного снижения скорости.
12.Изменение количества двухполюсных пар
Эти двигатели (многоскоростные двигатели) имеют более сложные обмотки статора и роторы в форме клетки, что позволяет менять количество пар полюсов. При работе асинхронных двигателей обмотки ротора и статора должны иметь одинаковое количество пар полюсов. Только ротор сепаратора может автоматически получить такое же количество пар полюсов, как и поле статора. Многоскоростные двигатели широко используются для привода станков. Используются двухскоростные, трехскоростные и четырехскоростные двигатели.
На рис. 2.22 показана схема соединений и магнитное поле статора двигателя с полуобмотками, соединенными последовательно (b) и параллельно (a).
Для двухскоростных двигателей каждая фазная обмотка состоит из двух полуобмоток. Соединяя их последовательно или параллельно, можно удвоить количество пар полюсов.
Для четырехскоростных двигателей требуются две независимые обмотки с разным количеством пар полюсов в статоре. Каждая обмотка позволяет удвоить количество пар полюсов. Например, для двигателя, работающего при частоте 50 Гц и 3000/1500/1000/500 об/мин, 3000 и 1500 об/мин (p=1 и p=2) могут быть достигнуты с помощью одной из обмоток статора. С другой обмоткой можно достичь скоростей 1000 и 500 об/мин (для p=3 и p=6).
При изменении числа пар полюсов магнитный поток в зазоре также изменяется, и критический момент Mкр. (рис. 2.23b). При изменении числа пар полюсов и приложенного напряжения критический момент не изменяется (рис. 2.23a). Таким образом, с помощью этого метода регулировки можно получить два типа характеристик механического семейства (рис. 2.23).
Преимущества данного метода регулировки: сохраняет жесткость механических свойств и обеспечивает высокую эффективность. Недостатки: постепенная регулировка, большие размеры, высокая стоимость двигателя.
Третий способ определения скорости — внимательно изучить надписи на самом двигателе. Последняя цифра на этикетке соответствует количеству полюсов. Например, для AIR160S6 последняя цифра 6 указывает на количество полюсов, используемых катушкой.
Регулирование частоты вращения асинхронного двигателя изменением числа полюсов в обмотке статора
Изменение количества пар полюсов обычно осуществляется следующим образом
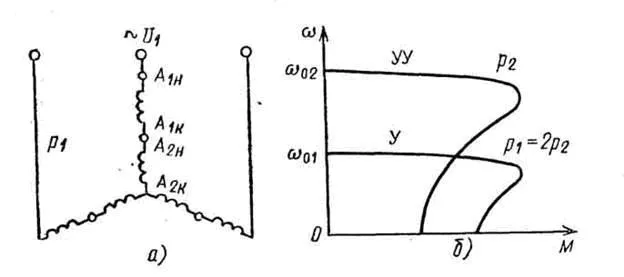
1. в статоре двигателя размещены две электрически не соединенные обмотки с разным числом пар полюсов. p1 и п2. когда одна из обмоток подключена к сети переменного тока. Количество пар полюсов p2 асинхронный двигатель работает с синхронной скоростью, соответствующей указанному числу полюсов (рис. 27а).
Другая обмотка выключена. Если скорости разные n1 обмотка с числом полюсов p2 другой полюс с номером p также отключен1. Такие асинхронные двигатели называются двигателями с двойной обмоткой.
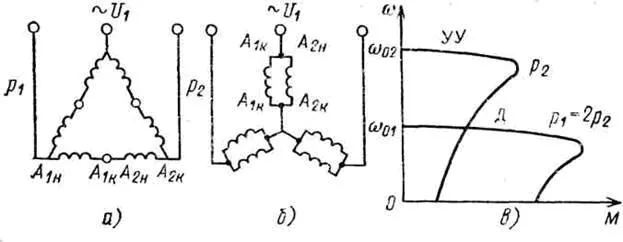
2. 2. В статоре расположена одна обмотка, при этом можно менять местами разное количество полюсов. Два распространенных типа переключателей обмоток для двухскоростных двигателей: треугольник L/S двойной звезды и звезда L/S двойной звезды (двойная звезда с двумя параллельными ветвями).
Для обеспечения примерно одинакового крутящего момента на обеих скоростях используются устройства типа «двойная звезда/двойная звезда» (рис. 27а). Такие схемы используются, например, в асинхронных двигателях для компрессорных двигателей, металлорежущих станков и т.д. Схемы подключения обмоток Y / C используются для двигателей вентиляторов (рис. 27, b).
Рис. 27.Механические характеристики при управлении скоростью асинхронного двигателя путем изменения числа пар полюсов при смене обмотки статора: a — треугольник (число пар полюсов p = p1) — двойная звезда (p = p2) — b — звезда (p = p1) — двойная звезда (p = p2)
Помимо описанных выше вариантов двухскоростных асинхронных двигателей, используются также трех- и четырехскоростные двигатели. Трехскоростные двигатели имеют прерывистую и непрерывную обмотки, а четырехскоростные двигатели имеют две прерывистые обмотки и могут достигать четырех синхронных обмоток, например, 3000/1500/1000/500 об/мин.
Двигатели с коленчатым валом могут иметь определенные аномалии из-за неправильного соотношения количества z-пазов в статоре.1, ротатор z2 Количество полюсов 2p.
Аномалия заключается в том, что двигатель может «заклинить». Это означает, что он может подключаться к сети или «замирать», т.е. начинать вращение, останавливаться на определенной скорости или вращаться с громким шумом. .
Чтобы избежать вышеуказанных явлений, необходимо соблюдать следующие пропорции
Следует также отметить, что количество полюсов может изменяться не только при регулировании скорости асинхронного двигателя путем изменения полярности, но и при изменении и ремонте номинальной скорости.
К положительным характеристикам многоскоростных индукционных двигателей следует отнести эффективность и относительно широкое управление скоростью вращения курсора. Недостатком этого метода регулирования является то, что вышеупомянутые скорости не могут быть изменены.
Многоскоростные двигатели характеризуются наличием всех полюсов, на которых включаются круги. Например, асинхронный четырехскоростной двигатель с 500/750/1000/1500 об/мин в минуту (2p = 12/8/6/4) характеризуется как 4A200M12/8/6/4UZ.
2х полюсные и 4х полюсные двигатели (шпиндели) для фрезерных станков с ЧПУ для изготовления памятников. Статьи компании «Уралфрезер»
12.1 Замена слипов.
Этот метод используется для привода механизмов, оснащенных асинхронными двигателями с фазно обмотанными роторами. Например, в приводах подъемно-транспортных машин. В цепь ротора с фазной обмоткой вставляется реостат. Увеличение эффективного сопротивления ротора не влияет на критический момент, но увеличивает критическое скольжение (рис. 2.21).
На рисунке 2.21 показаны механические характеристики асинхронного двигателя при различных сопротивлениях реостата Rр3> Rр2> 0, Rр1= 0.
Как видно из рис. 2.21, этот метод позволяет осуществлять широкое управление скоростью нисходящего потока. Основные недостатки этого метода:.
- Эффективность снижается из-за высоких потерь в управляющем реостате. Это означает, что данный метод неэкономичен.
- Повышенное эффективное сопротивление ротора смягчает механические свойства асинхронного двигателя. Это означает, что стабильность работы двигателя снижается.
- Плавная регулировка скорости невозможна.
Из-за указанных недостатков этот метод используется для кратковременного снижения скорости.
Четыре диаграммыВ данном случае, как и ранее, обмотка имеет четыре полюса, что соответствует удвоенной скорости вращения электродвигателя. Проверьте это, и я свяжусь с вами!
Регулирование угловой скорости асинхронного электродвигателя изменением числа пар полюсов на статоре
Вторая обертка недействительна. Для достижения другой скорости первая обмотка отключается и включается вторая обмотка на паре полюсов P2, поэтому последняя скорость двигателя соответствует скорости двигателя, работающего с другими механическими характеристиками.
Рассмотрим схему подключения статора АДП и механические характеристики этих случаев.
Чтобы получить полное представление о механических характеристиках, определим допустимые мощности ADP при подключении статора в соответствии с рисунком 2, A и B. Δεδομένου ότι το επιτρεπόμενο ρεύμα στο τμήμα περιέλιξης στάτη I1dop = I1nom θα παραμείνει το ίδιο μετά την αλλαγή του αριθμού των ζευγών πόλων, ας προσδιορίσουμε την επιτρεπόμενη πρωτογενή ισχύ:
Рисунок.
Αστέρι — διπλό αστέρι. Όσο μικρότερη είναι η γωνιακή ταχύτητα του κινητήρα AD, η σύνδεση των περιελίξεων του στάτη είναι όπως φαίνεται στο σχήμα. 3а. Τμήματα φάσης στάτη.
(Из (2) и (3) видно, что допустимая мощность также увеличивается в два раза при переключении обмотки статора на несколько пар полюсов (удвоение скорости АД). Поэтому допустимый момент срабатывания АД в обеих схемах соединения практически одинаков, а характеристики принимают вид, показанный на рис. 3б.
Кроме рассматриваемого двухскоростного АД, используются также трех- и четырехскоростные АД. Первый из них имеет одну некоммутируемую обмотку в дополнение к коммутируемой обмотке статора, которая аналогична рассмотренной выше. Четырехскоростные АД с различным количеством пар полюсов p1, p2, p3 и p4 обеспечивают четыре различные механические характеристики.
Рисунки 2c и 3b показывают, что механические свойства многоскоростных асинхронных двигателей имеют отличную жесткость и достаточную перегрузочную способность.
Рис. 4: Схема управления двухскоростным двигателем с сепаратором.
Недостатком этого метода является постепенное изменение скорости вращения двигателя и относительно узкий диапазон ее регулировки, обычно не превышающий 6-8.
Преимущества данного метода регулировки: сохраняет жесткость механических свойств и обеспечивает высокую эффективность. Недостатки: постепенная регулировка, большие размеры, высокая стоимость двигателя.
Изменение скорости асинхронных машин из-за изменения логарифмов полюсов Увеличение сопротивления ротора не влияет на значение критического момента, но увеличивает критическое скольжение.
2. 2. В статоре расположена одна обмотка, при этом можно менять местами разное количество полюсов. Два распространенных типа переключателей обмоток для двухскоростных двигателей: треугольник L/S двойной звезды и звезда L/S двойной звезды (двойная звезда с двумя параллельными ветвями).
Способы определения характеристик электромотора.
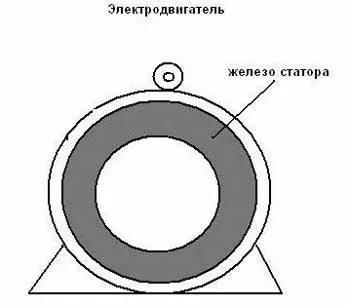
Как советуют некоторые эксперты, не обязательно разбирать двигатель для получения наряд-заказа, чтобы определить, к какой из этих групп относится двигатель. На самом деле, разборка электродвигателей может быть выполнена только теми, кто обладает достаточными навыками. На самом деле, достаточно открыть защитную крышку (она же подшипниковый щит), чтобы найти обмотки катушки. Таких катушек может быть несколько, но достаточно одной. Если на валу установлена полумуфта или шкив, необходимо также снять нижний щит.
Если при подключении катушек используются компоненты, мешающие передаче информации, эти компоненты ни в коем случае нельзя удалять. Соотношение размеров катушки и статора должно быть проверено визуально.
Статор называется неподвижной частью электродвигателя, а подвижная часть — ротором. В зависимости от конструкции, ротором может быть либо сама катушка, либо магнит.
Если катушка занимает половину кольца статора, то такой двигатель относится к третьей группе. Это означает, что они могут генерировать до 3000 об/мин. Если размер катушки составляет одну треть от размера кольца, то это, соответственно, второй тип двигателя и он может производить 1500 оборотов в минуту. Наконец, если катушка охватывает только четверть кольца, то это первый тип. Мощность электродвигателей составляет 1000 об/мин.
Существует и другой способ определения скорости курсора. Для этого также необходимо снять крышку и определить верхнюю часть обмотки. Скорость определяется по расположению секции обмотки. Как правило, внешняя секция занимает 12 гнезд. Общее количество розеток измеряется и делится на 12, чтобы получить количество полюсов. Если число полюсов равно 2, то скорость вращения двигателя составляет приблизительно 3000 об/мин в минуту. Если число полюсов равно 4, это соответствует 1500 об/мин в минуту. Для числа 6 — 1000 об/мин в минуту. Для числа 8 — 700 об/мин в минуту.
Третий способ определения скорости — внимательно изучить надписи на самом двигателе. Последняя цифра на этикетке соответствует количеству полюсов. Например, для AIR160S6 последняя цифра 6 указывает на количество полюсов, используемых катушкой.
Самый простой способ измерения скорости — использовать тахометр. Однако из-за тесной специализации применения этот метод не является общедоступным. Поэтому существует как минимум четыре способа определения частоты вращения электродвигателя, даже если техническая документация не сохранилась.
Как определить число пар полюсов асинхронного двигателя?
Методы определения скорости вращения электродвигателяСкорость вращения асинхронного электродвигателя обычно рассматривается как угловая скорость вращения курсора. Этот показатель указывается на указателях двигателя как скорость в минуту. Трехфазные двигатели также могут быть оснащены однофазным источником питания путем добавления конденсатора вместе с одной или двумя обмотками, в зависимости от напряжения питания, но это не меняет конструкцию двигателя.
Если роторы двигателя создают 2760 оборотов в минуту, то угловая частота двигателя составит 2760*2pi/60 рад/с, т.е. 289 рад/с, что не очень удобно для восприятия. Число оборотов в минуту, в минуту, в минуту, в минуту, в минуту, в минуту, тонкий». Для асинхронных двигателей это скорость с учетом скольжения S
Последняя скорость вращения двигателя (без учета скольжения) равна 3000 об/мин в минуту. Это связано с тем, что ток частоты 50 Гц. 50*60 питает обмотку статора, а магнитный ток частоты 50 Гц питает магнитный ток. = 3000, 3000 об/мин в минуту — скорость вращения современных асинхронных электродвигателей.
В рамках данной статьи мы обсудим, как определить современную скорость неизвестного асинхронного 3-фазного двигателя, просто взглянув на его статор. От старого — расположение обмоток и количество пазов — при отсутствии тахометра можно легко определить современную скорость электродвигателя. Давайте начнем с разворота и рассмотрим этот вопрос на примере.
Для асинхронных двигателей (см. Двигатели) принято говорить, что двигатель имеет один, два, три или четыре полюса. Минимальное значение — пара полюсов. Другими словами, минимум — это два полюса. Цифры. Здесь мы видим, что у Statt две катушки каждой фазы нагружены последовательно. В каждой паре катушек одна находится напротив другой. Эти катушки образуют пару полюсов на статоре.
Для наглядности одна из фаз показана красным цветом, вторая — зеленым, а третья — черным. Обмотки всех трех фаз расположены одинаково. Когда эти три обмотки питаются попеременно (3-фазный ток), 50 колебаний в каждой фазе заставляют поток статора вращаться на 360°. Другими словами, он вращается за 1/50 секунды. 50 оборотов в секунду. В результате скорость вращения составляет 3000 об/мин.
Таким образом, становится ясно, что для определения последней скорости асинхронного двигателя достаточно определить количество пар полюсов. Это легко сделать, просто сняв крышку и посмотрев на статор.
Разделите общее количество пазов статора на количество пазов на секцию обмотки в одной фазе. Если вы получаете 2, то перед вами двухполюсный двигатель с парой полюсов. Таким образом, синхронная частота составляет 3000 об/мин или около 2910 об/мин с учетом скольжения. В простейшем случае имеется 12 гнезд, по 6 для каждой катушки, и 6 таких катушек (по 2 в каждой из трех фаз).
Обратите внимание, что количество катушек в группе пар полюсов может быть 2 и 3, а не обязательно 1. Однако, например, рассматривалась только одна группа на пару катушек (в данной статье не рассматривается намотка). .
Для достижения современных скоростей 1500 об/мин число полюсов статора удваивается, и на каждое колебание 50 потоков совершается только половина оборота (180 градусов).
Как самостоятельно узнать число оборотов электродвигателя
Часто, приобретая электродвигатель с рук, автовладельцы оказываются без документации (и не только). В этом случае, как правило, приходится самостоятельно определять скорость вращения электродвигателя, а многие, как показывает практика, не умеют этого делать. В этой статье вы узнаете, как самостоятельно определить скорость вращения электродвигателя и что для этого нужно знать.
Пошаговое руководство по определению числа оборотов
1.Современные асинхронные электродвигатели делятся на три группы, каждая из которых представляет собой отдельные обороты ротора в минуту. Первая группа — это электродвигатели, вращающиеся со скоростью 1 000 оборотов в минуту. Сразу отметим, что эта цифра несколько преувеличена, поскольку двигатели асинхронные.
Обычно генерируется около 950-970 оборотов, но для удобства эксперты решили округлить эти цифры. Ко второй группе относятся двигатели со скоростью вращения ротора 1500 в минуту. Эти цифры также были округлены, так что на самом деле двигатели работают в диапазоне от 1430 до 1470 об/мин.
Третья группа асинхронных двигателей — это группа, к которой относится данная деталь, роторы которой вращаются со скоростью 3000 оборотов в минуту. Фактическая скорость составляет 2900-2970 оборотов в минуту.
2.Чтобы определить скорость электродвигателя, необходимо сначала определить, к какой из перечисленных выше групп он относится. Для этого откройте одну из крышек и положите намотанные катушки на дно. Следует отметить, что такие катушки могут состоять из одного или нескольких компонентов, особенно из трех или четырех. Также следует учитывать, что электродвигатель может иметь более одной такой катушки. Вам нужны только те, для поиска которых нужно приложить минимум усилий.
3. предупреждение. Катушки соединены между собой определенными компонентами, которые могут препятствовать отображению необходимой информации. Ни в коем случае не отсоединяйте их друг от друга. Внимательно посмотрите на выбранные компоненты и приблизительно определите размер катушки относительно кольца статора.

4. Это расстояние не обязательно определять точно, чтобы найти скорость электродвигателя. Приблизительный расчет может быть полезен.
Если размер катушки покрывает примерно половину кольца статора, то скорость вращения ротора составляет 3000 оборотов в минуту.

Если размер катушки покрывает примерно одну треть самого кольца, то двигатель относится ко второй группе и скорость вращения двигателя не будет превышать 1500 оборотов в минуту.
Если размер катушки покрывает четверть самого кольца, двигатель будет относиться к группе 3, так как число оборотов в минуту составит 1 000.
Обратите внимание, что приведенные данные являются приблизительными, могут отличаться на практике и зависят от ряда факторов.
Следующие статьи также могут быть полезны







