‘педаль’, может остаться только дроссельная заслонка. Среднее положение потенциометра — это отношение, а переднее и заднее положения — соответственно. Это очень просто: удалите из кода все, что связано с педалью тормоза, и увеличьте дроссельную заслонку!
Рцборда, или Как Сделать Управляемую через Интернет Машинку
В последние годы я создал несколько устройств дистанционного управления. Некоторые из них проверялись на месте с помощью обычного компьютера или смартфона. Некоторые из них управляются через интернет. Все устройства имеют одну общую особенность. Они управляются человеком, который смотрит видео с камеры устройства. Наконец, управление включает в себя отправку управляющих сигналов на серводвигатели или драйверы (отвертки) двигателя.
Таким образом, набравшись опыта в этой работе, мы решили попробовать систематически и планомерно контролировать различные типы управляющих устройств. Поэтому. В результате родился программный пакет RCBoard или RCBoard. RCBoard был изначально написан для него, так как я делаю все управляемым контроллером virt2Real, как его основным встроенным мозгом. Поэтому весь пучок можно аномально назвать «комплексом материальной культуры RCBoard».
В общем, после этой темы я пытаюсь написать рецепт, как Virtualica и RCBoard могут управляться онлайн (ну, и локально управляться) с обычной радиоуправляемой машины. В качестве канала подключения будет использоваться обычный Wi-Fi (доступ в интернет через домашний роутер) или 4G-соединение через свисток Yota.

Crawler BSD Racing 4WD RTR 2.4GHz 1:10
Я вам скоро скажу — термин «дистанционное управление» не подразумевает дешевый китайский автомобиль со всей электроникой, нанесенной на плату, и маленьким очень приличным двигателем, построенным по форме позвоночного. коллекторы, коллекторы, коллекторы, коллекторы, коллекторы, коллекторы, коллекторы, без передачи — независимо) и серверы, управляющие вращением передних колес.
В этом рецепте такие машины используются только в качестве экспериментальных животных. Это связано с тем, что их легче всего разводить. То же самое можно сделать с любой машиной, незначительно изменив конфигурацию заднего борта и добавив плату — регулятор оборотов двигателя. Самое главное, что у машины были колеса (и гусеницы) и был двигатель.
Что понадобится для сборки
- Контроллеры по производству двигателей, двигателей и услуг.
- Батареи (батареи с соответствующим напряжением для регулятора)
- Ревизор Virt2Real с камерой, адаптером USB-OTG и флеш-устройством micro SD
- Wi-Fi или свисток Yota (возможны другие 4G-модемы)
- Умеренная линейность
Но сначала приведем несколько примеров использования
Где это уже было использовано
Как я уже писал, мы использовали rtsborda во многих местах, но из задокументированных случаев я нашел только эти:.
Рцборда проводит испытания на колясках в глубоком Шэньчжэне в Москве — контроль
Испытание гусеничной машины РСВЛ в Санкт-Петербурге, контролируемое Москвой
rtsborda испытание самолета над Петербургом, контролируемое Москвой
Крутая снегоуборочная машина, управляемая rtsborda
Кстати, сама «Снегоходная машина» управляется пермскими детьми http://omiplow.ruによって設計されました.
Более тяжелые устройства под контролем rtsborda
Все детали дифференциалов на подшипниках.Так как я делал модель на долгое время. Так же заказал редуктор с понижающей передачей, передача будет включаться микросервомашинкой с пульта.
RC машинка. Мотор и сервопривод
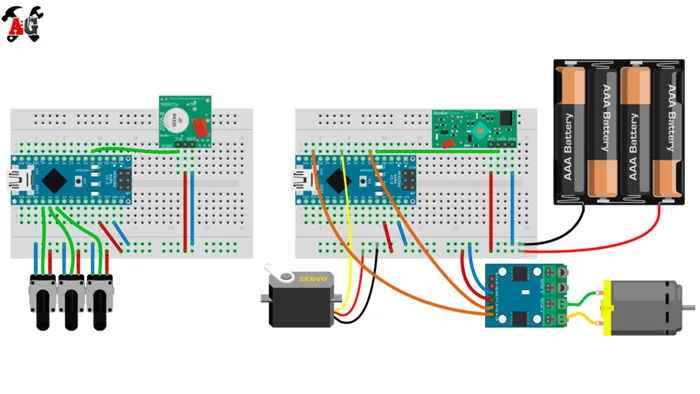
Логика следующая. Передатчик измеряет показания потенциометра, преобразует их в требуемое управление диапазоном и передает их по радио 10 раз в секунду. Приемник принимает и передает сигнал двигателю и сервису.
Используйте библиотеку Gyver433 для передачи данных и создания структур для удобства и наглядности. Со скоростью, значение в нашем случае не превышает -255…. 255. поскольку диапазон вращения равен 0, достаточно использовать байт для вращения руля серворуля… 180 градусов. Структура выглядит следующим образом
Передатчик.
Чтобы облегчить дальнейшую работу, определим терминалы входа в систему как константы.
Далее нам нужны пределы сигналов от руля, дросселя и реверса.
Эти значения должны быть измерены и скорректированы на содержание железа
Существуют также лимиты на обслуживание и двигатель. Рекомендуется вводить их на боковой стороне излучателя. Прошивка нужна только для того, чтобы настроить машину, не разбирая ее.
Опять же, эти цены зависят от ваших материалов и предпочтений.
Затем подключите библиотеку и настройте радио. В этом режиме хорошо работает «зеленая» беспроводная связь.
В блоке настройки () запустите последовательный запуск от потенциометра для запуска последовательного запуска. После установки последовательное соединение может быть отключено (комментарий онлайн):.
В блоке цикла () выполните следующие действия в последовательности.
Считайте аналоговые сигналы со всех трех регуляторов.
Извлеките необработанные цены в порты и настройте на их основе фастеры. После настройки выходы могут быть удалены.
Затем перенесите эти значения в зоны, предназначенные для сервисов и двигателей, и ограничьте каждый случай.
Создается структурный корпус, вводятся данные и оставляются для передачи по радиоканалу. Это осуществляется с помощью педали дроссельной заслонки. Удалите сигнал тормоза из сигнала «дроссельной заслонки». Это делает возможным очень реалистичное функционирование с сопутствующей возможностью одновременного нажатия на педали. (Дайте газ и немного нажмите на тормоз — машина замедлится =)
Ввести задержку в 10 миллисекунд (100 передач в секунду), так как нет смысла передавать его слишком часто. Измените этот проект, и в любой момент времени передача может быть хронометрирована в миллиметрах, если задержка влияет на нее (см. урок).
Приемник.
пин также находится в секции хоста.
Также были введены такие параметры, как минимальные обороты двигателя. Например, мы знаем, что автомобиль начинает двигаться, когда значение сигнала ШИМ превышает 45. В следующей программе диапазон управления масштабируется таким образом, что значение ШИМ увеличивается с 45 (или другого значения), когда педаль слегка ‘Press’:.
Затем подключите радиостанцию и настройте ее на ту же скорость, что и приемник. Приемник также имеет буфер, в который передается 3 байта данных (int + byte), а размер буфера установлен на 3.
Συνδέουμε τη βιβλιοθήκη σερβομηχανισμών και δημιουργούμε έναν σερβομηχανισμό για τον εαυτό μας:
Έγραψα μια ξεχωριστή κλάση για τον κινητήρα που χρησιμοποιεί δύο ακίδες PWM για ομοιόμορφο έλεγχο. Αυτό απλά τοποθετείται στο πρόγραμμα:
Πρόκειται ουσιαστικά για μια μίνι βιβλιοθήκη. Δημιουργούμε μόνοι μας έναν κινητήρα με τις ακίδες και το ελάχιστο σήμα PWM:
Στο μπλοκ setup() ενεργοποιήστε το Serial (αν χρειάζεται για αποσφαλμάτωση, μπορείτε να το απενεργοποιήσετε σε ένα έργο που λειτουργεί), συνδέστε το σερβομηχανισμό και αυξήστε τη συχνότητα PWM όπως σε αυτό το σεμινάριο:
Αν ακολουθήσετε προσεκτικά τις οδηγίες και αφιερώσετε χρόνο, δεν υπάρχει τίποτα πολύ περίπλοκο στην κατασκευ ενός μοντέλου RC μόνοι σας. Το κυριότερο είναι να χρησιμοποιείτε ποιοτικά εξαρτήματα από μια αξιόπιστη μάρκα, τα οποία μπαίνουν στη θέση τους άψογα. Και σας συνιστούμε να ξεκινήσετε με ένα πιο εύκολο κιτ και στη συνέχεια, αφού αποκτήσετε την αρχική εμπειρία, να αυξήσετε τον πήχη των συνηθειών.
Игрушки на радиоуправлении своими руками

Κάθε παιδί θέλει να έχει ένα τηλεκατευθυνόμενο αυτοκίνητο. Αυτές τις μέρες, αυτά τα αυτοκίνητα είναι αρκετά ακριβά και τα παιδιά τα σπάνε γρήγορα, αλλά μην πανικοβάλλεστε μάταια.
С помощью своих рук, воображения и простых в использовании материалов вы можете сделать картонный автомобиль, который будет не хуже пластиковых машин. Для его изготовления нам понадобится: — ящик из тумбы, — строительный нож, — карандаш, линейка, — клей, — двигатель постоянного тока, — кабель, — кнопка включения и выключения, — клей, джойстик, — батарейка ——————— — батарейка, — пластиковый круг, пластиковая труба, — резиновая лента, — металлическая палочка, пластиковая обложка для книги, — 6 пластиковых обложек 6 пластиковых обложек — деревянная палочка, — светодиод и конденсатор. Вырежьте немного картона, используя лист гофрированного картона размером 9/28 см. На левой стороне верхней части вырежьте прямоугольник 3/4,5 см сзади, около 1,5 см с боков, сделайте то же самое на нижней и правой стороне, вырежьте прямоугольник около 4,5 см сзади, 2. / 4,5 см, отрезать столько же снизу. В этих прямоугольниках посередине вырежьте полоску 1/ 4,5 см. Это будет дно нашего автомобиля.
Обрежьте боковые стороны. Для этого спланируйте вид автомобиля с помощью картона размером 9/28 см. На левой стороне отступите примерно 0,5 см от боковых сторон и 1 см от нижнего края, проведите линию длиной 4 см и от нее проведите наклонную линию длиной 5 см к краю картона. На правой стороне проведите горизонтальную линию от края чуть ниже бедра с небольшим наклоном длиной 7,5 см, от которой вниз к бедру идет линия длиной 5,5 см. На этом участке картона можно сконструировать окна, двери и колеса. Колеса и окна также нужно вырезать, а двери просто вырезать, чтобы они открывались и закрывались. Две из этих деталей необходимо изготовить, так как они будут боковыми сторонами нашего автомобиля. Чтобы сделать колеса, возьмите четыре крышки от пластиковых бутылок и просверлите в середине отверстие. При использовании бамбукового мангала приклейте в центре небольшой пластиковый круг и сначала просверлите соответствующее отверстие. Возьмите пластиковую трубку, как ватную палочку, и измерьте размер картона, который будет дном машины. Разрежьте два таких прямоугольника с правой стороны нижнего прямоугольника до центральной полосы. Затем поместите их в бамбуковые палочки рядом с кружками для склеивания с обеих сторон. Затем установите крышку бутылки и приклейте ее на расстоянии около 0,5 см от полосок, обрезав остаток бамбукового стержня так, чтобы он не торчал под крышкой. Поместите резинку в середину, где упакован пластиковый цикл. Приклейте колеса на правую сторону картона, шины должны находиться в среднем отверстии. Для следующих двух крышек поместите пластиковую трубку в отверстие, приклейте ее на место, а затем обрежьте пластиковую трубку по высоте самой крышки. Отрежьте два куска по 2,5 см от тела бироса. Наденьте их на металлическую палочку и согните палочку с помощью плоскогубцев. В результате получается горизонтальный металлический штырь длиной около 3 см, расположенный под углом 90°. Источник: zen.yandex.ru
Гусеничный танк на радиоуправлении своими руками

Оторвитесь от летающих игрушек с дистанционным управлением и приземлитесь на Землю. Сегодня мы покажем вам, как создать свою собственную гусеничную платформу в R/C за копейки. Платформа может быть оснащена танками, экскаваторами, бульдозерами и практически всем, что только можно придумать. Строительство радиоуправляемых домов — это очень приятное хобби.
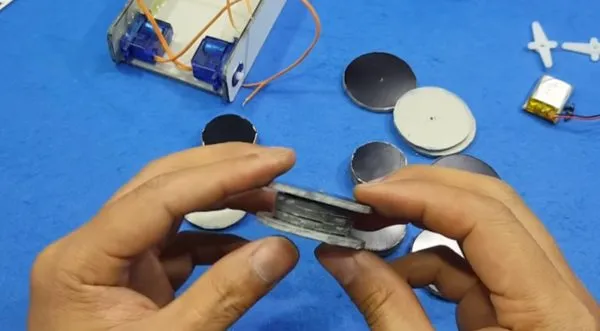
Вам понадобится двухканальный передатчик, джойстик, два сервопривода 9G, старая велосипедная камера, лист пластика и восемь палочек для мороженого. Да, не забудьте про литий-полимерный аккумулятор 3,7 В 150 мАч. На полке вы найдете клей, обрезки, нож и ножницы.

Двигатели представляют собой сервомашинки. Их нужно разобрать и срезать зубчатые упоры. Отрежьте стандартные кабели и приклейте по два кабеля к каждому двигателю (+ и — соответственно).
Вырежьте из пластика пластину 40×100 мм и две пластины 20×100 мм. Поместите сервоприводы на маленькие пластины. Затем соберите раму с помощью клея.
Также сделайте роллы из пластика. Вырежьте 12 кругов диаметром 20 мм и 8 кругов диаметром 30 мм с большой осторожностью и точностью. Приклейте три меньших круга и два больших круга на концах. Таким образом, у вас есть четыре цилиндра. Просверлите отверстия в обоих звеньях и в раме и прикрутите их к раме.
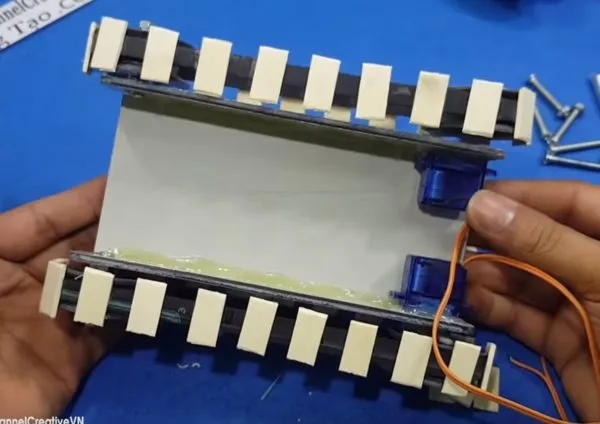
Отрежьте две полоски от старой внутренней велосипедной трубки длиной 25 мм и шириной 6 мм. Склейте каждую полоску вместе. Клей будет держаться, и соединение не будет испытывать большой нагрузки. Разрежьте палочки от мороженого на полоски 14 мм и приклейте их вдоль гусеницы.
Все сложные этапы пройдены. Установите тележку на ролики. Закрепите кабель от серводвигателя к передатчику и подключите аккумулятор. Прибыль. Наша гусеница готова. Проходы отличные. Теперь все зависит от вашей фантазии, чтобы придать вашей базе определенный вид! Спасибо за ваши комментарии и спасибо Creative Chanel. Источник: zen.yandex.ru