Скорость двигателя изменяется переменным резистором R5, который изменяет длительность импульса. Поскольку амплитуда ШИМ постоянна и равна напряжению питания двигателя, двигатель не останавливается даже на очень низких скоростях.
Способы регулирования частоты вращения двигателя постоянного тока.
>Когда нагрузка на вал двигателя увеличивается, ток якоря также увеличивается. Это увеличивает падение напряжения на сопротивлении обмотки якоря и контактах щетки. Поскольку ток возбуждения остается постоянным (двигатель не регулируется), магнитный поток также постоянен. Однако по мере увеличения тока якоря размагничивающее действие реактивного потока якоря возрастает, и магнитный поток Ф немного уменьшается. Увеличение IaRa приводит к снижению скорости двигателя, в то время как снижение F приводит к увеличению скорости. Падение напряжения обычно оказывает несколько большее влияние на изменение скорости, чем реакция якоря, поэтому скорость уменьшается при увеличении тока якоря. Колебания скорости для этого типа двигателей невелики и не превышают 5 % при изменении нагрузки от нуля до номинального значения, т.е. двигатели с параллельным возбуждением имеют жесткую характеристику скорости.
При постоянном магнитном потоке зависимость тока якоря от момента рассматривается как прямая линия. Но под влиянием
момент двигателя реакции якоря уменьшается с увеличением нагрузки, происходит некоторое снижение магнитного потока и зависимость момента немного ниже прямой линии.
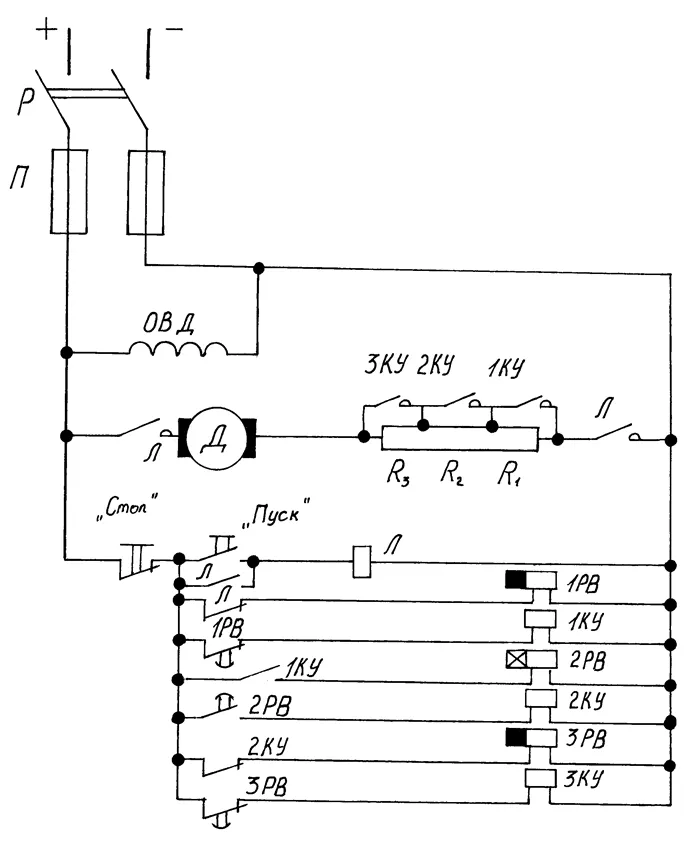
На рисунке 153 показана схема двигателя с последовательным возбуждением. Пусковой регулятор этого двигателя имеет только два вывода, так как обмотка возбуждения и якорь образуют последовательную цепь. Характеристики двигателя показаны на рисунке 154. Число оборотов двигателя с последовательным возбуждением определяется следующим выражением:
Где rs — сопротивление последовательной обмотки возбуждения. В двигателе с последовательным возбуждением магнитный поток не остается постоянным, а резко изменяется при изменении нагрузки, что приводит к значительному изменению скорости. Поскольку падение напряжения на сопротивлении обмотки якоря и возбуждения очень мало по сравнению с приложенным напряжением, число оборотов может быть приближенно определено следующим выражением:
Пренебрегая насыщением стали, можно предположить, что магнитный поток пропорционален току обмотки возбуждения, который равен току якоря. Следовательно, в двигателе с последовательным возбуждением скорость обратно пропорциональна току ротора, а число оборотов резко уменьшается с увеличением нагрузки, т.е. двигатель имеет характеристику плавной скорости. При уменьшении нагрузки скорость двигателя увеличивается. При отсутствии нагрузки (Ia=0) скорость двигателя возрастает до бесконечности, т.е. двигатель имеет головокружительную скорость.
Поэтому характерным свойством двигателей с последовательным возбуждением является недопустимость сброса нагрузки, т.е. работа без нагрузки или при низкой нагрузке. Минимально допустимая нагрузка на двигатель составляет 25-30% от номинальной нагрузки. Если нагрузка ниже минимально допустимой, скорость двигателя резко возрастает, что может привести к повреждению двигателя. Поэтому использование двигателей с последовательным возбуждением недопустимо, если существует возможность сброса или резкого снижения нагрузки.
Для очень маленьких двигателей сброс нагрузки не приводит к изменению, так как механические потери двигателя являются достаточно большой нагрузкой для него.
Вращающий момент двигателя с последовательным возбуждением можно определить на основе пропорциональной зависимости между магнитным потоком и током якоря (F = C’Ia), используя следующее выражение:
т.е. вращающий момент пропорционален квадрату тока. Однако при более высоких токах происходит насыщение стали, и зависимость крутящего момента приближается к прямой линии. Поэтому двигатели этого типа развивают высокие крутящие моменты при низких скоростях, что необходимо при запуске больших инерционных и перегрузочных масс. Эти двигатели часто используются в транспортном и подъемном оборудовании.
ОБОРУДОВАНИЕ ТЕХНОЛОГИИ РАЗРАБОТКИ
В этом курсе мы создадим ПИД-регулятор и оптимизируем его для различных степеней регулирования.
Предыдущий урок Каталог курсов Следующий урок
Чтобы настроить регулятор, необходимо выбрать аналоговый, интегральный и дифференциальный коэффициенты.
Эти коэффициенты задаются в программе следующим образом
#define K_P 0.1 //пропорциональный коэффициент #define K_I 0.01 //интегральный коэффициент #define K_D 0.0 //дифференциальный коэффициент
У каждого контролера есть критерии оценки качества контроля или показатели качества. Наиболее важными являются:
- Скорость или темп регулировки — время для уменьшения ошибки отклонения до приемлемого значения.
- Точность — ошибка рассогласования в установившемся режиме.
- Стабильность — отсутствие колебаний управляющего параметра.
Интегрирующий этап ПИД-регулятора уменьшает ошибку рассогласования до 0. Это означает, что точность ПИД-регулятора не может быть отрегулирована в статическом режиме. Она определяется только погрешностью измерений и расчетов.
Однако два других критерия качества контроля противоречат друг другу. Если время отклика велико, то контроллер обычно имеет низкую стабильность. И наоборот, если стабильность высокая, то контроллер работает медленно.
Это означает, что ПИД-регулятор может быть настроен
- для высокоскоростных реакций,
- для устойчивости к возмущениям,
- Конечно, это может быть компромисс.
Теорию автоматического управления (ТАУ) в институте преподавал очень квалифицированный специалист, хорошо известный в стране, Савин Михаил Михайлович. Не заглядывая в тетради и учебники, он писал на доске огромные формулы. Значительная часть курса ТАУ Михаила Михайловича была посвящена определению устойчивости буферной системы.
Оказывается, что устойчивость системы можно рассчитать теоретически. В качестве основного показателя он рассматривал критерий устойчивости Найквиста, который формулируется следующим образом: линейная динамическая система, устойчивая в неуправляемом состоянии, устойчива в управляемом состоянии, если амплитудно-частотная характеристика (AFCF) неуправляемой системы не охватывает точку с координатами (-1, j0) в комплексной плоскости при изменении частоты от 0 до бесконечности.
Помимо того, что в системе задействован двигатель, электрические и механические параметры которого нам неизвестны, мы должны попытаться понять его, рассчитать и представить AFRF.
Я говорю о том, что мы будем делать все эмпирически, то есть через опыт. Михаил Михайлович меня простит.
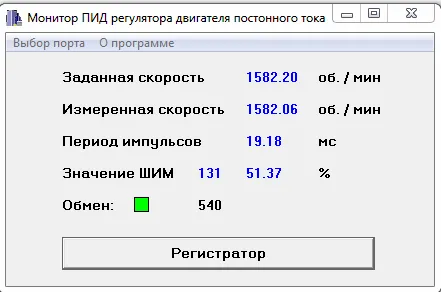
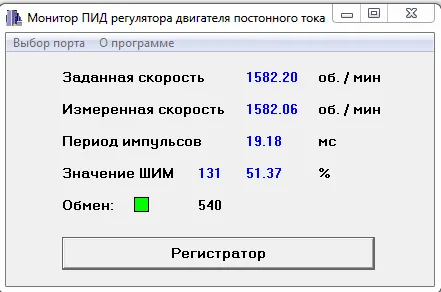
Программа верхнего уровня для настройки ПИД-регулятора.
Оптимальная настройка ПИД-регулятора возможна только путем наблюдения за его реакцией на различные типы возмущений. Для этого необходим инструмент, регистрирующий изменения параметров управления в режиме реального времени.
Я разработал программу высокого уровня, которая выполняет эти функции.
Установка и выполнение программы ничем не отличается от других программ высокого уровня в курсе Arduino.
Скачайте файл PidMotorReg.zip.
Зарегистрируйтесь и заплатите. Всего 40 рублей в месяц за доступ ко всем ресурсам сайта!
Скопируйте папку PidMotorReg в подходящее место.
Подключите плату Arduino к программе контроллера на компьютере.
Запустите файл PidMotorReg.exe.
Если при первом запуске COM-порт установлен неверно, на экране появится сообщение.
Критерии выбора и соимость
Чтобы выбрать наиболее подходящий тип контроллера, необходимо хорошо знать различные типы контроллеров:
- Различные типы контроллеров. Может быть векторное или скалярное управление. Первые используются чаще, вторые считаются более надежными.
- Мощность контроллера должна быть равна максимальной мощности двигателя.
- Что касается напряжения, то имеет смысл выбрать устройство, обладающее наиболее гибкими характеристиками.
- Частотные характеристики. Контроллер, который вам подходит, должен соответствовать самой высокой частоте, которую использует двигатель.
- Другие особенности. К ним относятся гарантийный срок, размеры и другие характеристики.
В зависимости от назначения и производительности, цены на регуляторы могут значительно отличаться.
Большинство из них варьируются от 3,5 тысяч рублей до 9 тысяч:
- Регулятор скорости KA-18 ESC, предназначенный для моделей масштаба 1:10, стоимостью 6 890 руб.
- Регулятор скорости коллектора MEGA (водонепроницаемый). Стоимость 3605 рублей.
- Регулятор скорости для моделей LaTrax масштаба 1/18. Цена 5690 руб.
Плавная работа двигателя без рывков и пиков мощности является гарантией его долговечности. Для управления этими дисплеями используется регулятор скорости электродвигателя на 220 В, 12 В и 24 В, все эти частотные преобразователи можно изготовить самостоятельно или купить уже готовый блок.
Включение и выключение контроллера внешним сигналом эквивалентно неисправности входа. По сути, скорость заданного значения изменяется от 0 до заданного значения.
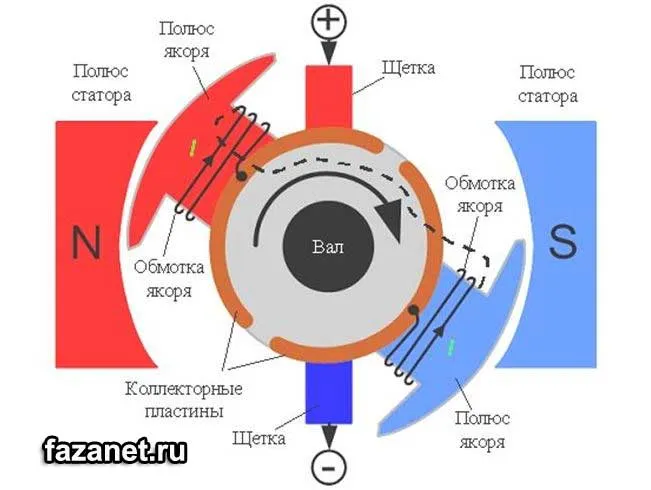
Принцип действия.
Работа этого двигателя напрямую зависит от взаимодействия магнитных полей статора и коллектора. Как мы с вами уже знаем, в статоре и коллекторе есть обмотки. При подаче напряжения на эти обмотки создаются магнитные поля. Эти магнитные поля заставляют коллектор вращаться. Это видно на рисунке.
Регулировка
Теперь объясним, как можно управлять скоростью вращения коллекторных двигателей. Поскольку скорость вращения двигателя просто зависит от приложенного напряжения, для этой цели хорошо подходит любое регулировочное устройство, которое может выполнять эту функцию.
В качестве примера перечислим некоторые из этих вариантов:
- Лабораторный автотрансформатор (LATP).
- Заводские платы настройки, используемые в бытовых приборах (такие платы можно использовать, например, в блендерах или пылесосах).
- Ручки, используемые при производстве электроинструментов.
- Бытовые выключатели с диммерами для мягкого освещения.
Однако все эти методы имеют существенный недостаток. При снижении скорости одновременно снижается мощность двигателя. В некоторых случаях его можно даже просто остановить вручную. В некоторых случаях это может быть приемлемо, но в большинстве случаев это является существенным препятствием.
Хорошим вариантом является контроль скорости с помощью датчика скорости. Обычно он устанавливается на заводе. При отклонении скорости вращения двигателя через симисторы на двигатель подается скорректированный ток, соответствующий желаемой скорости. Если в эту цепь встроен регулятор оборотов двигателя, потери мощности не происходит.
Как это выглядит структурно? Наиболее распространенными являются реостатные и полупроводниковые регуляторы скорости.
В первом случае используется переменный резистор с механическим управлением. Он подключается последовательно с коллекторным двигателем. Недостатком является выделение дополнительного тепла и потеря дополнительного времени работы батареи. При таком типе управления происходит потеря крутящего момента двигателя. Это экономически эффективное решение. Он не подходит для достаточно мощных двигателей по причинам, указанным выше.
Во втором случае, когда используются полупроводники, мотор управляется специфическими стимулами. Схема может изменять длительность этих импульсов, что, в свою очередь, изменяет скорость без потери мощности.
Достоинства и недостатки.
Основными преимуществами DPT являются:
1. 1.
2. 1.1 Простая конструкция двигателя.
3. Сильный крутящий момент делает его очень хорошим стартером.
4. его можно использовать как двигатель, так и генератор.
5. он не слишком большой по сравнению с некоторыми другими двигателями.
1. очень высокая цена.
2. если двигатель подключен к сети переменного тока, также необходимы выпрямители.
3. щеточный коллектор нуждается в частом обслуживании.
4. коллектор имеет ограниченный срок службы из-за износа.
Первый способ является убыточным и поэтому используется редко. Регулирование скорости происходит под нагрузкой, и тогда необходимо использовать другой градиент механических параметров. Крутящий момент в этом случае не изменяется.
Регуляторы оборотов
Теперь мы вернемся к теме регулятора превышения скорости. Все доступные сегодня системы делятся на две большие категории:
- Стандартная схема регулятора скорости,
- Модифицированные устройства контроля скорости.
Рассмотрим подробнее характеристики схем.
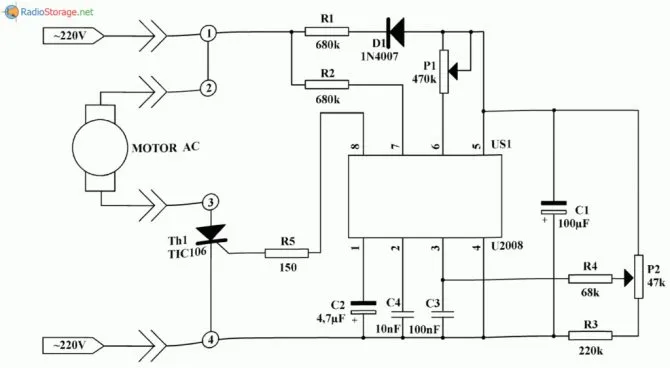
Стандартные схемы
Стандартная схема контроллера коллекторного двигателя имеет некоторые особенности:
- Построить динистор несложно. Построить испытательный стенд несложно,
- Контроллер обладает высокой степенью надежности, что положительно сказывается в течение всего времени его эксплуатации,
- Он позволяет пользователю удобно изменять скорость вращения двигателя,
- Большинство моделей основаны на тиристорном контроллере.
Если вас интересует принцип работы, то эта схема кажется довольно простой.
- Зарядный ток от источника 220 вольт поступает в конденсатор.
- Затем напряжение пробоя диэлектрика поступает на переменный резистор.
- После этого происходит фактическая поломка.
- Симистор открывается. Этот элемент отвечает за нагрузку.
- Чем выше напряжение, тем чаще открывается симистор.
- Этот принцип работы управляет скоростью вращения двигателя.
- Большинство таких схем управления двигателем используется в отечественных пылесосах импортного производства.
- Однако при использовании стандартного регулятора скорости важно знать, что он не имеет обратной связи. При изменении нагрузки необходимо отрегулировать скорость вращения двигателя.
Модифицированная схема
Прогресс не стоит на месте. Несмотря на удовлетворительную работу стандартной схемы управления оборотами двигателя, усовершенствования никому не повредили.
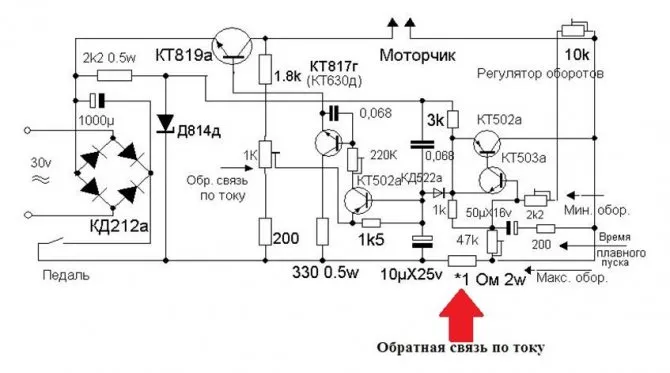
Наиболее часто используются две схемы:
- Регулятор. Как следует из названия, в основе лежит реостатная схема. Эти средства управления особенно эффективны при изменении скорости вращения двигателя. Высокая эффективность объясняется использованием силовых транзисторов, которые снимают часть напряжения. Это означает, что двигатель получает меньший ток от источника 220 вольт и ему не приходится работать с высокой нагрузкой. Однако схема имеет тот недостаток, что она выделяет большое количество тепла. Для того чтобы регулятор работал долго, необходимо активное, постоянное охлаждение электроинструмента,
- Интегрированный. Встроенный контроллер использует встроенный таймер, который отвечает за нагрузку на электродвигатель. Здесь могут быть использованы транзисторы всех типов. Это связано с наличием в конструкции микросхемы с высокими значениями выходного тока. Когда нагрузка меньше 0,1 ампера, все напряжение поступает непосредственно на микросхему и минует транзисторы. Для эффективной работы регулятора на затворе необходимо напряжение 12 вольт. Поэтому схема и напряжение питания должны соответствовать этому диапазону.
ШИМ-регулятор оборотов электродвигателей коллекторного типа
Резистор обычно используется последовательно с двигателем для регулирования скорости маломощных двигателей. Однако такой тип подключения обеспечивает очень низкий КПД и, прежде всего, не позволяет плавно регулировать скорость (нелегко найти переменный резистор с достаточной мощностью при сопротивлении в несколько десятков Ом). Самым большим недостатком этого метода является то, что ротор иногда останавливается при падении напряжения питания.
ШИМ-контроллеры, о которых пойдет речь в этой статье, позволяют плавно регулировать скорость без вышеперечисленных недостатков. Кроме того, ШИМ-контроллеры могут использоваться для управления яркостью ламп накаливания.
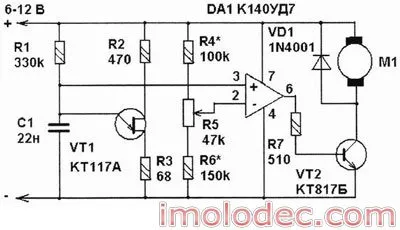
На рисунке 1 показана принципиальная схема одного из таких ШИМ-контроллеров: транзистор VT1 является генератором пилообразного напряжения (с частотой повторения 150 Гц), а операционный усилитель на микросхеме DA1 работает как компаратор, формируя ШИМ-сигнал на базе транзистора VT2. Скорость регулируется переменным резистором R5, который изменяет длительность импульса. Поскольку амплитуда равна напряжению питания, электродвигатель не «тормозится», и, кроме того, можно добиться более медленного вращения, чем при нормальной работе.
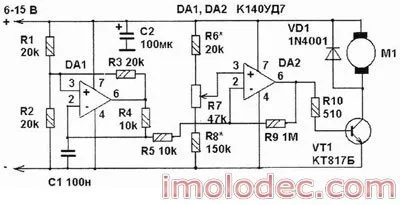
Схема ШИМ-контроллера на рисунке 2 аналогична предыдущей, но здесь основной генератор находится в операционном усилителе (op-amp) DA1. Этот оп-амп служит генератором импульсов треугольного напряжения с частотой повторения 500 Гц. Переменный резистор R7 позволяет плавно регулировать вращение.
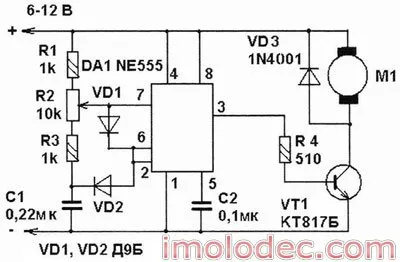
На рисунке 3 показана очень интересная схема контроллера. Этот ШИМ-контроллер основан на встроенном таймере NE555. Опорный генератор имеет частоту повторения 500 Гц. Длительность импульса и, следовательно, скорость вращения ротора электродвигателя можно регулировать в диапазоне от 2 до 98% периода повторения. Выход ШИМ-генератора таймера NE555 подключен к усилителю тока, который размещен в транзисторе VT1 и управляет электродвигателем M1.
Основным недостатком описанных выше схем является отсутствие элементов для стабилизации скорости вращения вала при изменении нагрузки. Следующая схема, показанная на рисунке 4, решит эту проблему.
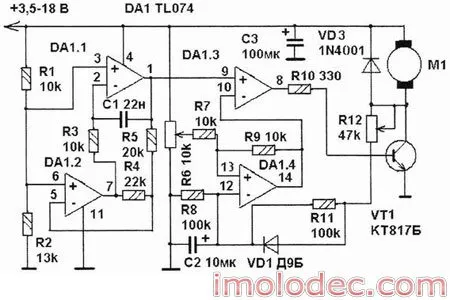
Данный ШИМ-контроллер, как и большинство подобных устройств, имеет генератор импульсов напряжения с треугольной формой (частота повторения 2 кГц), который находится в DA1.1.DA1.2, компаратор в DA1.3, электронный ключ в транзисторе VT1, а также регулятор дежурного импульса, а именно частоты вращения электродвигателя — R6. Особенностью схемы является положительная обратная связь через резисторы R12, R11, диод VD1, конденсатор C2 и DA1.4, которая обеспечивает постоянную скорость вращения вала двигателя при изменении нагрузки. Когда ШИМ-контроллер подключен к конкретному двигателю, глубина PIC устанавливается с помощью резистора R12, что гарантирует, что скорость не будет автоматически колебаться при увеличении или уменьшении нагрузки на вал двигателя.
Однако диапазон регулирования обычно составляет nMAX/nMIN = 2 — 5. Это объясняется тем, что нижний предел скорости обусловлен насыщением двигателя, что снижает значение магнитного потока Ф
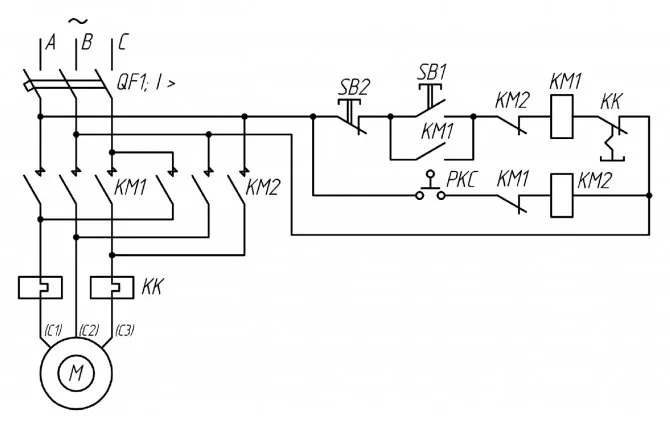
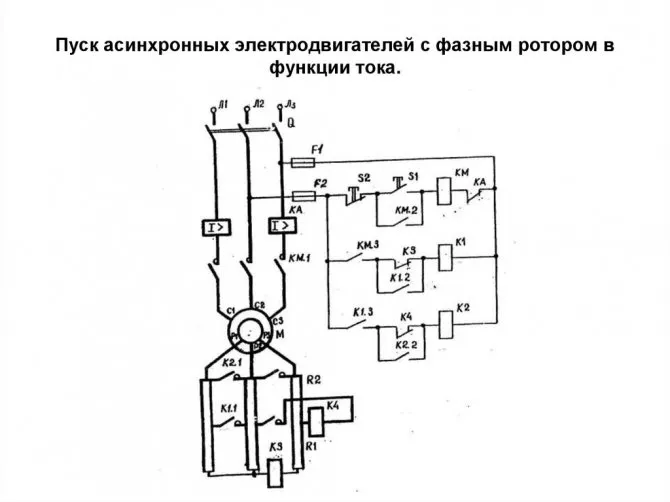
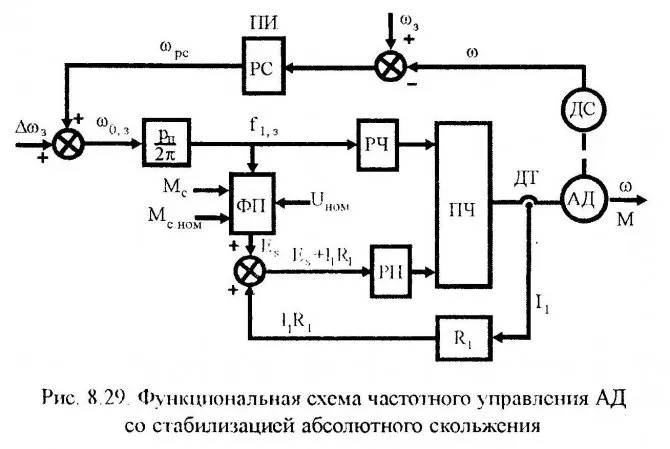
Регулирование частоты вращения асинхронных двигателей
Для управления скоростью асинхронных двигателей и для управления их режимами работы существуют следующие методы:
- Частота — изменяя частоту тока в энергосистеме, изменяется скорость вращения электродвигателя. Для этого метода используется устройство, называемое преобразователем частоты,
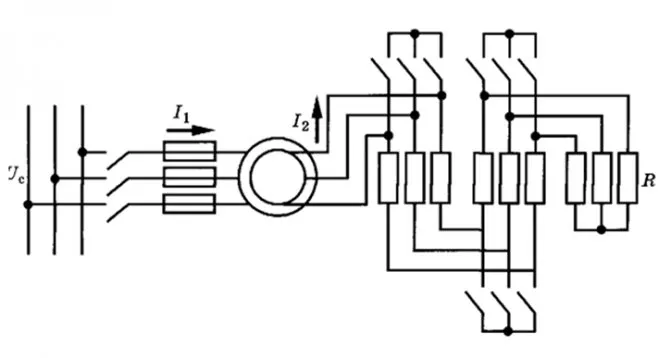
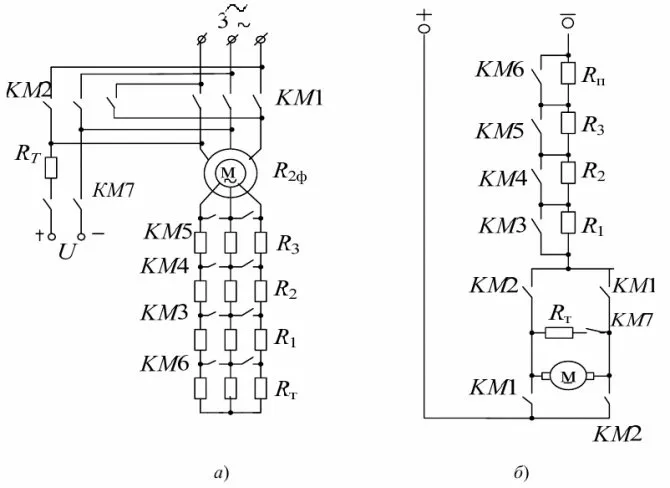
- Так называемый реостат — изменяя сопротивление реостата в роторе, изменяется скорость вращения. Этот метод увеличивает пусковой момент и критическое скольжение,
- Импульсный — метод управления, при котором на двигатель подается напряжение особого типа.
- Во время работы электродвигателя обмотки меняют соединение со звезды на треугольник, что снижает пусковые токи,
- Управление путем изменения пары полюсов для роторов с червячной клеткой,
- подключение индуктивного резистора для двигателей с фазовым вращением.
С развитием электронных систем управление различными асинхронными двигателями становится все более эффективным и точным. Эти двигатели широко используются во всем мире, и разнообразие выполняемых ими задач растет с каждым днем, поэтому потребность в них не уменьшается.
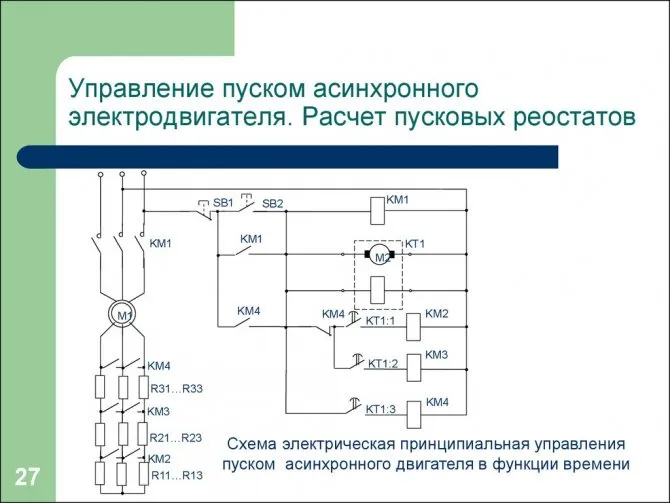
Регулирование количества пар плюсов асинхронного привода
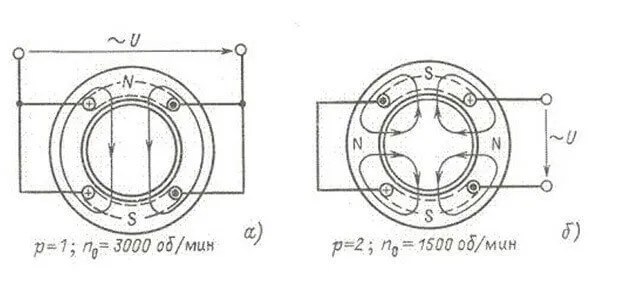
Высокоскоростные асинхронные двигатели используются со сложными обмотками, которые облегчают смену положительных пар. Скорости вращения двигателя можно менять, и принцип управления рассматривается на двухскоростном двигателе.
В таком устройстве все фазы содержат две полуобмотки. В зависимости от того, как они подключены к двигателю, вращение меняется.
В двигателях с четырьмя скоростями обмотки похожи на отдельные части. При изменении количества пар скорость снижается вдвое. Вторая обмотка работает по тому же принципу.
Критический момент изменяется в зависимости от количества пар. Чтобы поддерживать его постоянным, напряжение должно регулироваться одновременно с изменением количества пар (в этом может помочь переключение «звезда-треугольник» или другие варианты).
Преимуществами этого варианта являются высокий КПД и постоянные характеристики двигателя.
Недостатками являются ступенчатое управление, большой вес агрегатов и гораздо более дорогой электродвигатель.

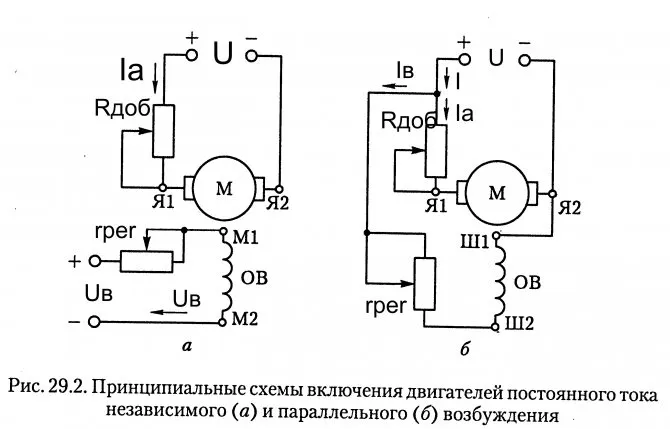
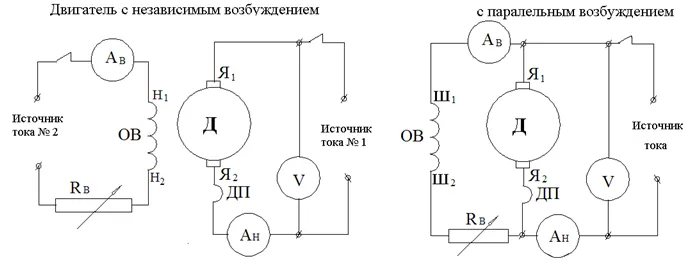
Регулирование частоты вращения ДПТ НВ изменение напряжения в цепи якоря
Управление скоростью двигателя путем изменения напряжения питания применимо только в том случае, когда IB = const, т.е. когда контуры ротора и возбуждения питаются отдельно с независимым возбуждением.
Скорость холостого хода n пропорциональна напряжению и не зависит от напряжения, поэтому механическая реакция двигателя не изменяет своего наклона к пропасти, а смещается по высоте и остается параллельной друг другу (см. рис. 29.4, c
Для реализации этого метода регулировки цепь якоря двигателя должна быть подключена к регулируемому источнику напряжения. Для управления двигателями малой и средней мощности в качестве такого источника можно использовать регулируемый выпрямитель, где напряжение постоянного тока изменяется саморегулирующимся трансформатором (АТ) на входе выпрямителя (рис. 29.6а).
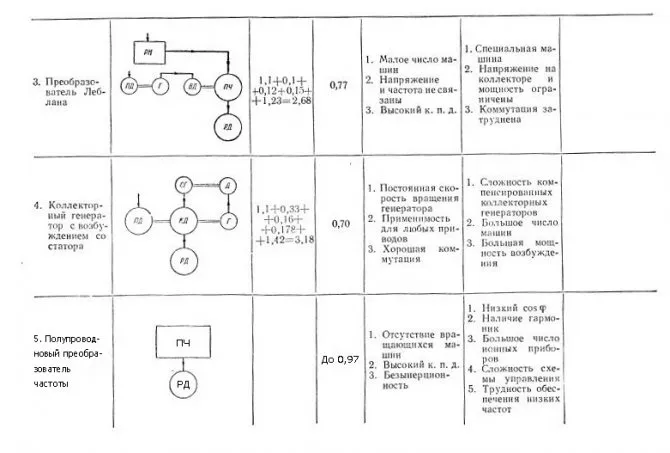
Для управления мощными двигателями целесообразно использовать генератор постоянного тока с внешним возбуждением; привод обеспечивается приводным двигателем (DM); обычно используется трехфазный двигатель. Возбудитель постоянного тока используется для питания цепей возбуждения D
цепей возбуждения генератора Г и двигателя Д, используя генератор постоянного тока — возбудитель В, выходное напряжение которого остается неизменным. Описанная схема управления двигателем постоянного тока (рис. 29.6, б) называется системой генератор-двигатель (Г-Д).
Рекомендуется изучить следующие темы: — Сельсины: Функция, структура, работа
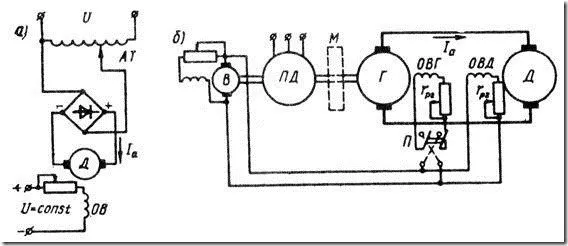
Рис. 29.6 Схемы подключения двигателей постоянного тока для регулирования скорости путем изменения напряжения якоря
Изменяя напряжение якоря, можно регулировать скорость двигателя в сторону уменьшения от номинальной скорости, так как напряжение выше номинального недопустимо. Если необходимо отрегулировать скорость в сторону увеличения от номинальной, можно изменить ток возбуждения двигателя.
Изменение направления вращения (реверсирование) двигателя, работающего в системе D, осуществляется путем изменения направления тока возбуждения.
— D, изменяется на противоположный путем изменения тока возбуждения генератора с помощью переключателя P, т.е. путем изменения полярности клемм генератора. Когда двигатель постоянного тока работает с быстро меняющейся нагрузкой, для смягчения колебаний входной мощности трехфазной сети на вал двигателя устанавливается маховик М, который накапливает энергию при снижении нагрузки двигателя D и отдает ее в период высокой нагрузки двигателя.
Регулирование скорости путем изменения напряжения в цепи якоря обеспечивает плавное и экономичное управление в широком диапазоне nMAX/nMIN ≥ 25, при этом большая скорость ограничивается условиями переключения, а меньшая — условиями охлаждения двигателя.







