Системы позиционирования оси позволяют интеллектуальным контроллерам позиционировать оборудование с исключительной точностью. Выдается команда на перемещение в желаемую точку в трехмерном пространстве и машина реагирует очень быстро и точно.
Шаговый двигатель
Шаговый электродвигатель — это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления 1.
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов 2.
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Конструкция шагового электродвигателя
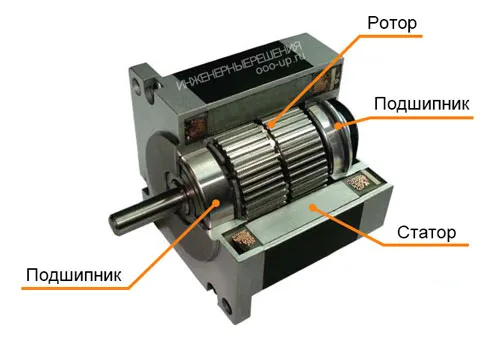
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Что такое шаговый двигатель
Согласно наиболее популярному определению, это машина, которая преобразует электрическую энергию (ее она получает из сети) в механическую осуществляя дискретные (внимание, не непрерывные, это важно) перемещения ротора. Причем после каждого такого действия положение динамической части фиксируется.
Все отдельные передвижения одинаковой величины, и вместе они формируют полный оборот (цикл). Поэтому, подсчитав их количество, можно без труда и с высокой точностью вычислить абсолютную позицию инструмента. Общее их число, кстати, зависит от ряда моментов: характер подключения, вид устройства, способ задания команд и другие факторы.
Принцип работы шагового электродвигателя
- На клеммы подается напряжение, благодаря которому специальные щетки начинают вращаться.
- Под воздействием входящих импульсов ротор устанавливается в начальное положение, а затем перемещается под одним и тем же углом.
- Микроконтроллер (в большинстве случаев, хотя возможна и другая внешняя цепь управления) приводит в действие зубчатые электромагниты. Тот из них, к которому прикладывают энергию, притягивает шестерню, обеспечивая тем самым поворот вала.
- Остальные магниты по умолчанию выровнены относительно ведущего, поэтому они сдвигаются вместе с ним по направлению к очередной детали.
- Шестеренка вращается за счет переключения электромагнитов по порядку – от главного к следующему и так далее. При этом она выравнивается относительно предыдущего колеса, что завершает цикл.
Шаг шагового двигателя – это описанный выше алгоритм, и он повторяется необходимое для выполнения технологической операции количество раз.
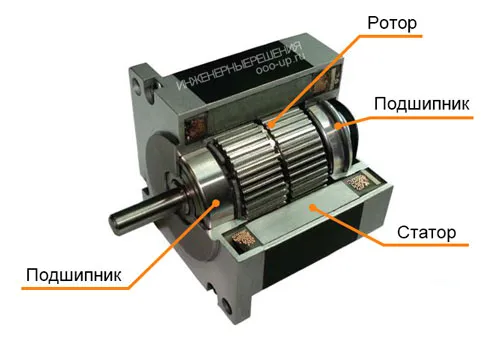
Представление о внешнем виде и характере функционирования дополнит следующий рисунок:
Из него ясно, что к статору относятся четыре обмотки, расположенные крестообразно, то есть под углом в 90 0 друг к другу. Отсюда понятно, что и дискретное движение будет осуществляться на такую же величину градусов. Если напряжение подавать поочередно – U1, U2, U3 и так далее – ротор сделает полный оборот, а затем пойдет на второй круг, то есть начнет вращаться – до тех пор, пока его не потребуется остановить. Ну а, чтобы изменить направление его движения, достаточно задействовать витки в обратном порядке.
На каждом втором перемещении задействована одна фаза, в то время как между ними – пара. Это дает возможность вдвое уменьшить величину угла и, следовательно, в 2 раза повысить количество переходов в течение оборота. Удобен именно тем, что сравнительно просто обеспечивает результат, поэтому достаточно распространен.
Обмотка электроприводов
Все шаговые моторы подразделяются по принципу конфигурации электроцепей (обмоток). В связи с этим выделяют следующие категории электрооборудования:
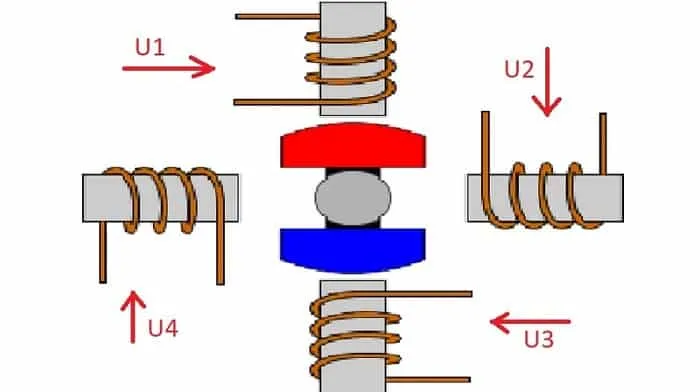
Однополярные электроприводы имеют в своей конструкции одну обмотку с отводами в центральной части электроцепи. Подключение секций производится раздельно. Такое разделение позволяет переключать половины обмоток и тем самым управлять направлением магнитного поля, не изменяя направление тока. Это предполагает существенное упрощение управляющей схемы драйвера с применением только четырех простых ключей.
Серединные ответвления каждой фазы могут выводиться раздельно, в результате чего общее количество контактных проводов для двухфазного мотора будет равняться шести. В ряде случаев они могут объединяться, поэтому контактов для подключения будет пять. Однополярные электродвигатели могут также работать в биполярном режиме, если центральные ответвления не подключать к питанию.
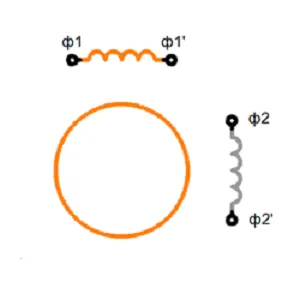
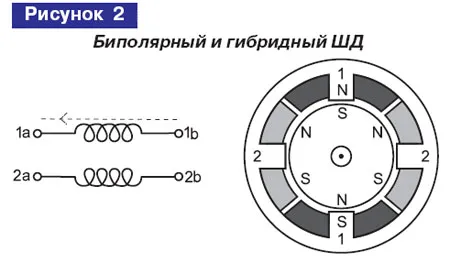
Двухполярные эл/двигатели имеют также по одной обмотке на каждую фазу, но без серединных отводов. Поэтому схема изменения направления магнитного поля реализуется иным способом, предусматривающим реверс тока через обмотки. По сравнению с униполярным вариантом данная схема отличается большей сложностью и требует применения мостового или полумостового с 2-полярным электропитанием драйвера.
Подключение биполярного шагового двигателя производится через выводы от каждой отдельной обмотки. В связи с тем, что у двухфазных моторов всего четыре цепи, общее количество выводных контактов составляет четыре. БШД обладает лучшей характеристикой удельной мощности, определяемой соотношением мощности и объема. При аналогичных габаритах с однополярными моделями они обеспечивают больший крутящий момент. Исходя из характерных особенностей конфигурации электроцепей, становится понятным, как определить тип эл/двигателя. Для этого достаточно обратить внимание на количество выходящих наружу проводов.
Основная характеристика
Главным техническим параметром всех типов ШД служит шаг роторного механизма, определяемый углом поворота вала на один импульс. Последовательность электрических сигналов задается системой управления эл/привода. При этом каждый поворот вала осуществляется в определенную единицу времени. Величина углового перемещения может быть разной и определяется дискретностью шага, что, в свою очередь, влияет на характер работы мотора.
Дискретность перемещения имеет большое значение для станков с ЧПУ и современных технологий 3д-печати. Поэтому для каждого конкретного применения выбирают ШД с оптимальной дискретной величиной. Угол поворота выходного вала электромотора на один шаг определяется исходя из числа устойчивых положений на полный оборот. Например, при 200 позициях дискретность шага будет находиться как: 360˚/200 = 1.8˚.
Все отдельные передвижения одинаковой величины, и вместе они формируют полный оборот (цикл). Поэтому, подсчитав их количество, можно без труда и с высокой точностью вычислить абсолютную позицию инструмента. Общее их число, кстати, зависит от ряда моментов: характер подключения, вид устройства, способ задания команд и другие факторы.
Контроллер управления шаговыми двигателями, сделанный своими руками
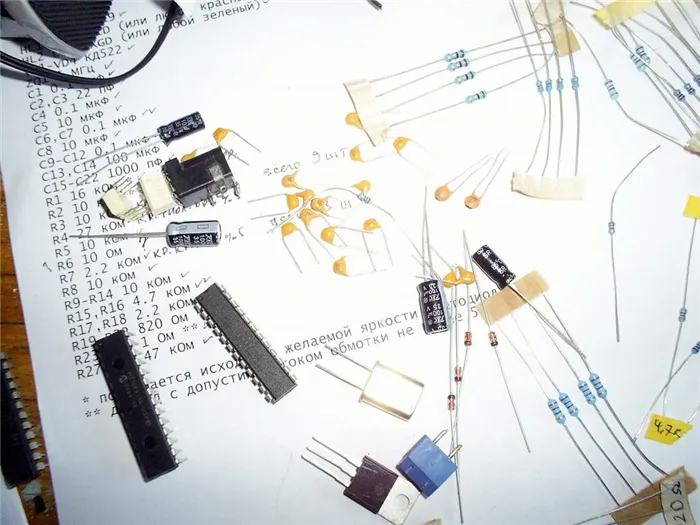
Задача проста: по готовой схеме и программе Павла Бахтинова с этого форума развести печатную плату, собрать и отладить контроллер управления шаговыми двигателями, установленными в монтировке астрономического телескопа. Далее, необходимо изготовить приличный корпус и пульт управления.
Все начинается с деталек (сразу вспоминается закон Мерфи: «Ни один талант не смог пережить страсти к деталькам» ):
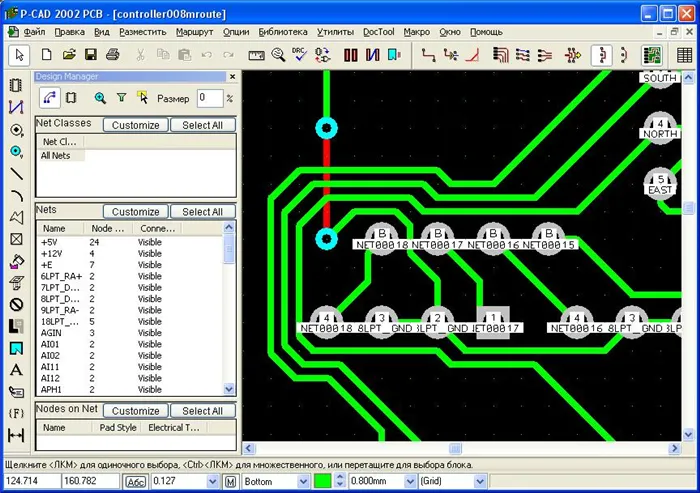
Тут надо сказать несколько слов о моем НОУ-ХАУ в изготовлении фотошаблонов для перевода рисунка на печатную плату.
Обычно я их печатаю на принтере — чаще на струйном, реже на лазерном, т.к. термопленка давала непредсказуемую усадку после термообработки в лазернике (а шаблоны необходимы для двух сторон), поэтому невозможно было совместить два шаблона с достаточной точностью (до 0,15 мм).
Струйный принтер хорошо повторяет размеры, но не достаточно плотно заполняет черным цветом дорожки, кое-где они все же просвечиваются. Решение этой проблемы было вскоре найдено: печатаем не чистым черным, а чуть светлее в сторону желтого — принтер начинает добавлять к черной краске желтую (непрозрачную для УФ излучения) и дорожки, хотя и выглядят более прозрачными, после перевода фотоспособом получаются более плотные, практически без изьянов.
Главное — подобрать экспозицию:
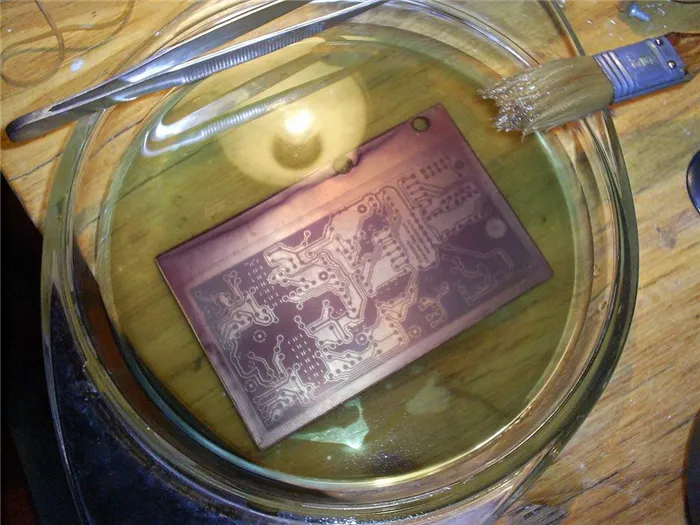
Идет процесс травления печатной платы:

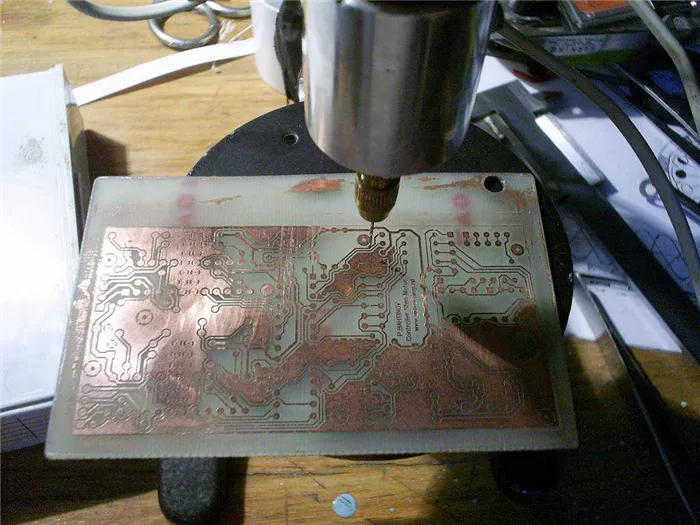
Сверлим отверстия диаметром от 0.7мм до 1.5мм самодельным сверлильным станком:
Паяльник старенький да удаленький:
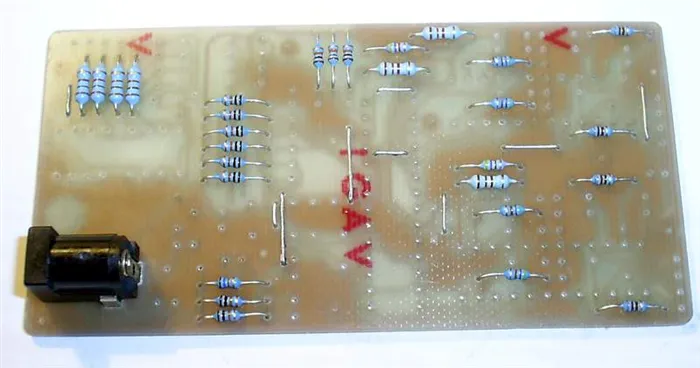
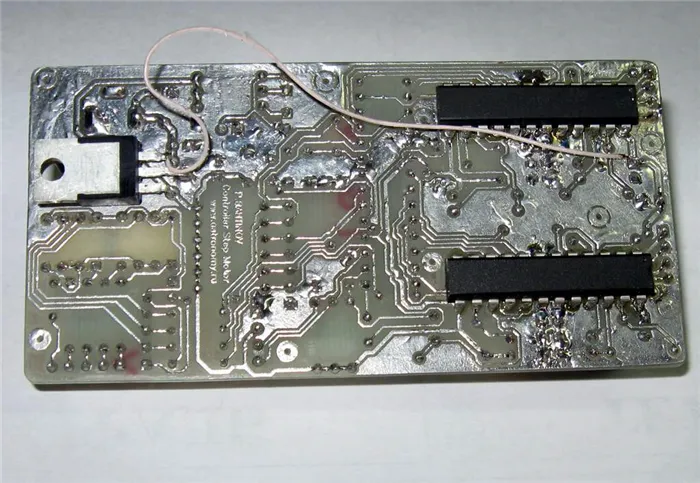
Обратная сторона платы, начался процесс отладки:
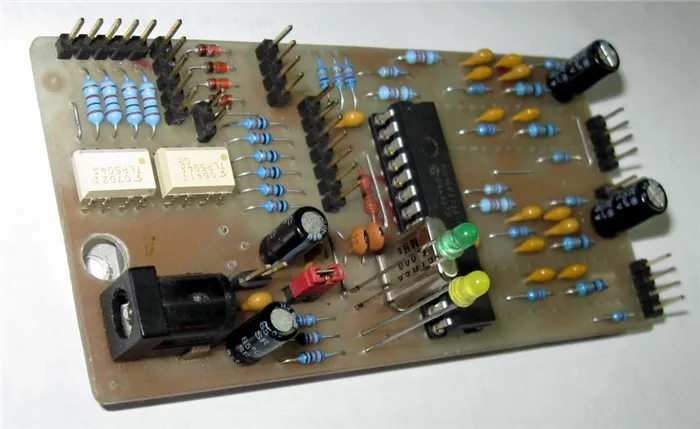
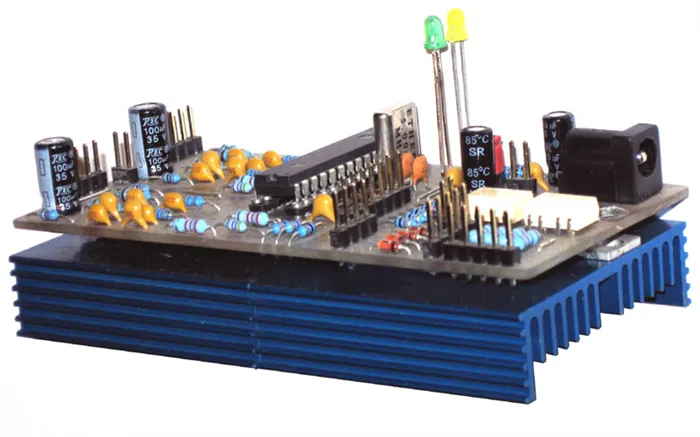
Вот так будем ставить нагревающиеся элементы (те, что выше на рисунке с этой стороны платы стоят — интегральный стабилизатор и две микросхемы — драйверы моторов) вот на такие красивые радиаторы:
В данное время началась работа над пультом. Главное в пульте управления, считаю — эргономика, насколько только это уместно применить к той коробочке, которая получится после сборки на отечественных БОЛЬШИХ, но надежных микрокнопках.
Недостатки и достоинства шаговых двигателей
Преимущества шаговых двигателей
• Точное позиционирование без обратной связи. Число импульсов определяет угол поворота.
• Двигатель обеспечивает полный крутящий момент при снижении скорости вращения, вплоть до остановки.
• Двигатель фиксирует свое положение при остановке за счет тока удержания.
• Регулировка скорости вращения с высокой точностью без обратной связи.
• Способность быстрого старта, остановки, реверса.
• Высокая надежность. Отсутствие коллекторных щеток. Недостатки шаговых двигателей.
• Сложная система управления.
• Невысокие скорости вращения.
• Возможно явление резонанса.
• Может произойти потеря позиционирования при механических перегрузках.
Попробуем найти минусы
Как и всему на свете шаговому двигателю присущи определенные достоинства и недостатки.
Но есть области в точной механике, в которых он просто незаменим. Там где надо перемещать механические узлы, мгновенно останавливать, двигать назад, регулировать скорость… Попробуйте мгновенно остановить коллекторный двигатель, и вы забудете о недостатках шагового.
Попробуйте реализовать изменение скорости коллекторного двигателя в широких пределах. Проще поставить шаговый с его недостатками.
В завершении объемной статьи хочу выразить благодарность источникам, откуда мы черпали информацию:
На каждом втором перемещении задействована одна фаза, в то время как между ними – пара. Это дает возможность вдвое уменьшить величину угла и, следовательно, в 2 раза повысить количество переходов в течение оборота. Удобен именно тем, что сравнительно просто обеспечивает результат, поэтому достаточно распространен.
Недостатки шагового двигателя:
- Постоянное потребление энергии, даже при уменьшении нагрузки и без нагрузки
- У шагового двигателя существует резонанс
- Из-за того что нет обратной связи, можно потерять положение движения.
- Падение крутящего момента на высокой скорости
- Низкая ремонтопригодность
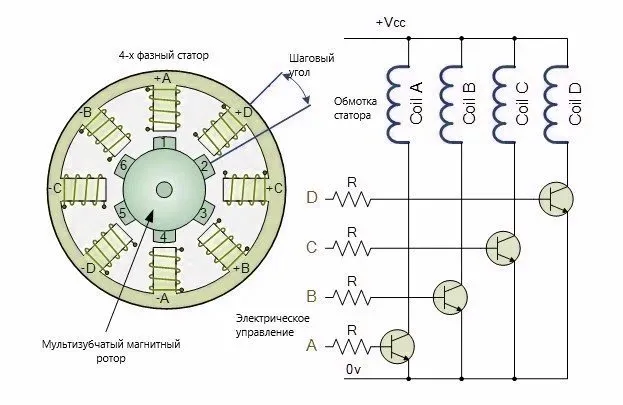
На примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора и окружен четырьмя электромагнитными катушками, помеченных A, B, C и D. Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить » из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение ).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например,» ADCB, ADCB, ADCB, A…» и т.д., ротор будет вращаться в одном направлении (вперед ) и посредством при изменении последовательности импульсов на» ABCD, ABCD, ABCD, A…» и т. д. ротор будет вращаться в противоположном направлении (назад ).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45°. Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60°друг от друга.
Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней », чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 ° / 24 = 15 ° .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази ) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту ), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6°на шаг. Чтобы повернуть двигатель на угол, скажем, 216°, а затем снова остановиться в требуемом положении, потребуется всего: 216°/ (3 ,6°/ шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя. Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Драйвер шагового двигателя
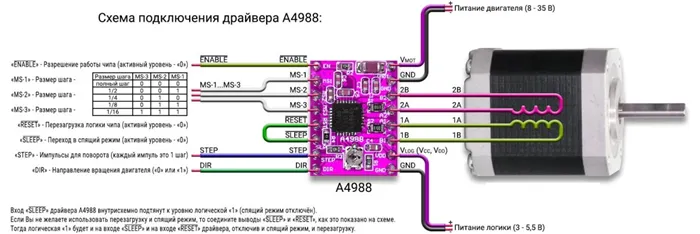
драйвер шагового двигателя это электронное силовое устройство, которое на основании цифровых сигналов управления управляет сильноточными/высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться ). Стандартом управления являются сигналы STEP/DIR/ENABLE. STEP это сигнал шага, DIR это сигнал направления вращения, ENABLE это сигнал включения драйвера.
Управлять шаговым двигателем сложнее, чем обычным коллекторным двигателем, нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления шаговыми двигателями были разработаны специальные устройства называемые драйверами. Они позволяет управлять вращением ротора в соответствии с сигналами управления и определенным образом делить физический шаг на более мелкие дискреты.
К драйверу подключается источник питания, шаговый двигатель и сигналы управления с платы контроллера. Стандартом по сигналам управления является управление сигналами STEP/DIR или CW/CCW и сигнал ENABLE.
Сигнал STEP — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал DIR — Потенциальный сигнал, сигнал направления. Логическая единица — ШД вращается по часовой стрелке, ноль — ШД вращается против часовой стрелки, или наоборот. Инвертировать сигнал DIR обычно можно либо из программы управления или поменять местами подключение фаз ШД в разъеме подключения в драйвере.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) против часовой стрелки. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал ENABLE — Потенциальный сигнал, сигнал включения/выключения драйвера. Обычно логика работы такая: логическая единица (подано 5В на вход) — драйвер ШД выключен и обмотки ШД обесточены, ноль (ничего не подано или 0В на вход) — драйвер ШД включен и обмотки ШД запитаны.
Драйверы шагового двигателя могут иметь дополнительные функции:
- Контроль перегрузок по току.
- Контроль превышения напряжения питания, защита от эффекта обратной ЭДС от ШД. При замедлении вращения, ШД вырабатывает напряжение, которое складывается с напряжением питания и кратковременно увеличивает его. При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
- Контроль переполюсовки при подключении сигналов управления и питающих напряжений.
- Режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP).
- Автоматический компенсатор среднечастотного резонанса ШД. Резонанс обычно проявляется в диапазоне 6-12 об/сек, ШД начинает гудеть и ротор останавливается. Начало и сила резонанса сильно зависит от параметров ШД и его механической нагрузки. Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонирование ШД и сделать его вращение равномерным и устойчивым во всем диапазоне частот.
- Схему изменения формы фазовых токов с увеличением частоты (морфинг , переход из режима микрошага в режим шага при увеличении частоты). ШД способен отдать заявленный в ТХ момент только в режиме полного шага, поэтому в обычном драйвере ШД без морфинга при использовании микрошага ШД работает на 70% от максимальной мощности. Драйвер ШД с морфингом позволяет получить от ШД максимальную отдачу по моменту во всем диапазоне частот.
- Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем перемещения без применения ПК.
Униполярные шаговые двигатели, так же как и биполярные, имеют две обмотки, и каждая из них имеет центральный отвод. В зависимости от требуемого направления магнитного поля, в работу включается соответствующая половина обмотки, что достигается простым переключением ключей и существенно упрощает схему драйвера.
Достоинства и недостатки шаговых электродвигателей
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Как работает шаговый двигатель?
Каждый тип работает по-своему, поэтому описать работу таких двигателей стоит отдельно.
Шаговый двигатель с регулируемым сопротивлением
Двигатели этого типа не имеют хороших параметров и были вытеснены из промышленности шаговыми двигателями других типов, но опишем его для понимания общего принципа работы.
Полный шаг
Сопротивление в шаговом двигателе понимается как магнитное сопротивление. Если мы поместим проводник в магнитное поле электромагнита, он будет притягиваться. Чем ближе он подойдет, тем меньше будет сопротивление.
На рисунке показан пример шагового двигателя с переменным сопротивлением с четырьмя катушками. Они намотаны попарно и на противоположных сторонах статора. Это дает нам восемь полюсов. Ротор сделан из проводника, а количество выступов (плечей) зависит от количества катушек.
Когда соответствующая пара катушек запитана, самые близкие плечи ротора притягиваются к ним больше всего. Таким образом, будет сделан один шаг. В этом случае расчет угла поворота для одного шага будет следующим:
6 плеч ротора × 4 катушки статора = 24 шага
полный оборот 360° / 24 шага = 15° — за шаг для данного шагового двигателя
Половина шага
Чтобы удвоить количество шагов, мы будем использовать Половину шага вместо Полного шага.
Для этого нужно изменить последовательность включения катушек. В предыдущем случае использовалась только одна пара катушек за раз. На этот раз мы используется две соседние дополнительные пары, чтобы сделать промежуточный шаг. Теперь у нас есть 8 комбинаций (а не 4) катушек с питанием. Это означает, что мы удвоили разрешение до 48 шагов и 7.5° для одного шага.
6 плеч ротора × 8 катушек статора = 48 шагов
полный оборот 360° / 48 шагов = 7.5° — за шаг для данного шагового двигателя
Микро шаг
Возможно еще больше увеличить разрешение. Для этого нам нужно иметь возможность регулировать ток таким образом, чтобы протекающий через катушки был вдвое меньше. Благодаря этому мы удваиваем количество возможных состояний по сравнению с методом Половины шага. Теперь мы имеем 96 шагов и 3,25° на один шаг.
6 плеч ротора × 8 катушки статора × 2 состояния силы тока = 96 шагов
полный оборот 360° / 96 шагов = 3.25° — за шаг для данного шагового двигателя
Таким образом, мы можем все больше и больше увеличивать разрешение. К сожалению, помимо очевидных преимуществ такого метода, у него есть и большие недостатки. Чем больше количество микрошагов, тем чаще переключаются катушки и, следовательно, меньше крутящий момент.
Упомянутые методы управления (Полный, Половина и Микро), применяются для шагового двигателя с переменным сопротивлением. Однако они могут также применяться для любого последующего типа двигателей.
Шаговый двигатель с постоянным магнитом
Шаговый двигатель с постоянным магнитом работает за счет взаимодействия полюсов магнитов. Разные полюса ( S — юг — N — север ) притягиваются друг к другу, а одинаковые ( S — S и N — N ) отталкиваются. В результате шаговые двигатели этого типа имеют гораздо больший крутящий момент. В отличие от шагового двигателя с переменным магнитным сопротивлением, двигатель с постоянным магнитом не имеет плеч на роторе. Он построен как бы из нескольких магнитов, попеременно и радиально намагниченных. Разрешение двигателя зависит от количества таких магнитов. Однако чем больше этих магнитов, тем они меньше по размеру и поэтому они меньше взаимодействуют с электромагнитами в статоре. В результате двигатель имеет меньший крутящий момент.
В следующем простом примере показан ротор с шестью магнитными полюсами. С двумя полюсами электромагнитов это дает 12 полных шагов на оборот. Чаще всего встречаются двигатели имеющие 24 или даже 48 шагов.
Гибридные шаговые двигатели в настоящее время являются наиболее популярным типом, особенно в промышленности. Они сочетают в себе преимущества двигателей с постоянным магнитом и двигателей с переменным сопротивлением. Благодаря этому у них лучшие параметры, такие как крутящий момент и разрешение. Разрешение типичного гибридного шагового двигателя составляет от 0.9° до 3.6°, что дает от 100 до 400 полных шагов на оборот, а помимо этого к ним также можно применять Микро шаг.
Ротор выполнен из постоянных магнитов, однако, в отличие от двигателя, описанного выше, магниты расположены аксиально, а не радиально. Кроме того, как вы можете видеть на картинке, ротор разделен на два (иногда четыре) кольца. У каждого из них маленькие зубцы. Чем их больше, тем выше разрешение. Зубья на обоих концах (кольцах) ротора смещены на ползуба. У статора тоже есть зубцы, но они на одной прямой. Благодаря этому, когда зубцы одного кольца имеют разные полюса и притягиваются друг к другу, зубцы второго кольца (имеющего тот же полюс, что и катушка) будут точно посередине. Это улучшает характеристики двигателя и увеличивает его крутящий момент.







