
Запуск мотора в ход таким способом имеет в основе изменение параметра Мвр — от наивысшего до минимального значений. Уровень сопротивления снижается ступенчато, полностью соответствуя ломаной кривой. Исключение реостатных частей реализуется ручным методом или же автоматически.
ПУСК АСИНХРОННОГО ДВИГАТЕЛЯ

Асинхронные электрические двигатели с короткозамкнутым ротором благодаря своей крайней простоте получили широкое распространение, особенно в трехфазных сетях, где им не требуются дополнительные пусковые или смещенные по фазе обмотки.
При правильной эксплуатации асинхронный электродвигатель становится практически вечным – единственное, что в нем может потребовать замены, это подшипники ротора.
Однако ряд особенностей асинхронных двигателей определяет специфику их пускового режима: отсутствие обмотки якоря означает отсутствие противоЭДС индукции в момент включения обмоток статора, а следовательно – высокий пусковой ток.
Если для маломощных электрических двигателей это не критично, то в промышленных электродвигателях пусковые токи могут достигать очень высоких значений, что приводит к просадкам напряжения в сети, перегрузкам подстанций и электропроводки.
ПРЯМОЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Как уже было сказано выше, прямое включение обмотки асинхронного двигателя может применяться только при низкой мощности. В этом случае пусковой ток превышает номинальный в 5-7 раз, что не является проблемой для коммутационного оборудования и электропроводки.
Основной проблемой прямого пуска становится подключение нескольких электродвигателей к маломощной подстанции или генератору.
Включение в сеть нового электродвигателя может вызвать настолько сильную просадку напряжения, что уже работающие двигатели остановятся, а новому мотору не хватит пускового момента, чтобы стронуться с места.
Пусковой ток асинхронного двигателя достигает максимального значения в момент включения и плавно снижается до номинального по мере раскрутки ротора.
Следовательно, для уменьшения времени перегрузки сети асинхронный двигатель должен включаться с минимальной нагрузкой, если это возможно.
Мощные токарные станки, гильотины для рубки металла не имеют фрикционных муфт, и все их вращающиеся механизмы раскручиваются в момент включения электродвигателя.
В этом случае длительные просадки напряжения приходится прямо закладывать в проектируемое для них электроснабжение.
Течение тока через обмотки нарушается, когда контактор «звезды» открывается и восстанавливается вновь, когда закрывается контактор «треугольника». В этот момент (сдвиг на «треугольник») формируется короткий, но сильный переходный пик тока по причине противоэлектродвижущей силы электродвигателя.
Старт напрямую
В основе данного распространенного метода – подсоединение статорных обмоток к электрической сети питания без элементов – «посредников». Чаще всего такой пуск имеет место в моторах с роторами короткозамкнутого типа. Такие силовые агрегаты обладают малой мощностью, при прямом подключении к сети питания их обмоток статора не возникает перегрева из-за пусковых токов. Благодаря этому техника не выходит из строя.
Уровень соотношения индуктивности катушек в асинхронных электродвигателях к уровню сопротивления – довольно маленькое. Данное число становится еще меньше, когда устройство обладает меньшей номинальной мощностью. Это обусловливает быстрое затухание свободного тока, который генерируется в процессе запуска. Такая особенность позволяет пренебрегать таким током, не включая его в расчет. Учитывать стоит только ту силу, которая установился в процессе реализации переходного процесса.
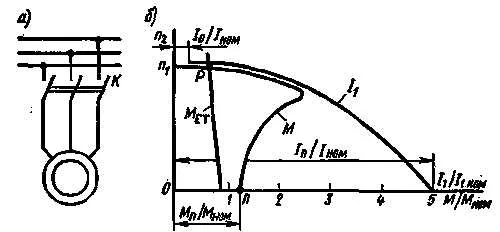
Как можно видеть на изображении магнитного пускателя – компонент осуществляет автоматический разгон с применением естественной механической характеристики (М на схеме). Реализуется это от точки П (непосредственного начала запуска) и до того момента, при котором М выйдет на уровень, равный показателю сопротивления (Мс). Сам же магнитный пускатель конструктивно представляет собой выключатель электромагнитного типа, устанавливаемый на силовые агрегаты с роторами короткозамкнутого действия.
На второй части картинки вы можете видеть график зависимостей пускового тока от первого момента. Зная это, можно утверждать, что ускорение для разгона равен разнице абсцисс двух графиков: М и Мс. Исходя из этого, если М пусковой будет меньшим Мс, тогда достаточного разгона не получится. Для того, чтобы его все-таки реализовать, нужно иметь оптимальное значение для Мпуск. В случае с силовым агрегатом с короткозамкнутым ротором лучше всего применять специальные формулы, вот одна из них :
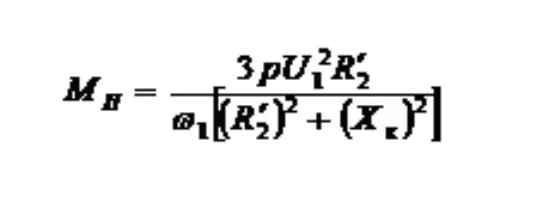
При этом, стоит учитывать, что коэффициент скольжения s в формуле стабильный и равен единице.
Соотношение М пускового и М номинального представляет собой величину, которая определяется кратностью стартового момента. Для удобства это результирующее число указывается как Кпм. В случае с электромоторами, оборудованными короткозамкнутыми роторами, данный коэффициент достигает числа 1,8, регулируется государственными стандартами.
Например, в ситуациях, когда Кпм равен 1,5, а М номинальный – 5000 Нм, прямой запуск начинается с Мп – 7000 Нм.
Стоит также отметить, что не нужно превышать показатели, заданные ГОСТом, ведь это чревато резким увеличением активных сопротивлений на вращающихся компонентах электродвигателя.
К преимуществам принципиальной схемы прямого запуска мотора относят:
- низкая стоимость реализации;
- простота конструкции;
- минимум нагрева у обмоток в процессе запуска.
Отметим также и недостатки такого движения:
- М пусковой в 3 раза превышает М номинальной;
- стартовый ток достигает и вовсе показателя в 800% от уровня номинального.
Но, несмотря на слабые стороны такой схемы запуска и торможения мотора, она остается одной из самых предпочтительных для реализации в асинхронных электродвигателях. Особенно прямой старт выгодно реализовывать с роторами короткозамкнутого типа, ведь он обеспечивает силовому агрегату высокие энергетические характеристики. Также в такой схеме используется одна кнопка или сразу несколько, отвечающих за «старт» и «стоп».
Старт путем понижения напряжения
Данный метод плавно запустить мотор используется с двигателями, которые работают на высоких мощностях. Также способ подходит и для агрегатов со средней мощностью, но при условии, что уровень напряжения рабочей сети питания не дает возможности проводить разгон, используя вышеописанный метод прямого пуска.
Для того, чтобы понизить напряжение в агрегате, можно использовать один из трех способов:
- осуществить переключение статорных обмоток с нормальной схемы типа треугольник на пусковую схему «звезда». Старт необходимо начать именно с последней, а когда устройство достигнет номинальной частоты, стоит переключиться на треугольник. В такой ситуации напряжение, которое обеспечивает питание фаз обмоток статора, снижается приблизительно в 1,73 раза. Это дает возможность сократить показатели фазных токов, а линейные сократить в 3 раза;
- старт при помощи добавочного сопротивления, которое способствует общему сокращению вольтажа на обмотке статора. Когда реализуется пуск, в электрическую цепь подключают резисторные компоненты или реакторы, которые обеспечат активное или реактивное сопротивление;
- запуск при помощи подключения двигателя через трансформатор. При этом используется сразу несколько степеней, переключающихся в автоматическом режиме.
Второй (реакторный) и третий (трансформаторный) способ отображены на рисунке :
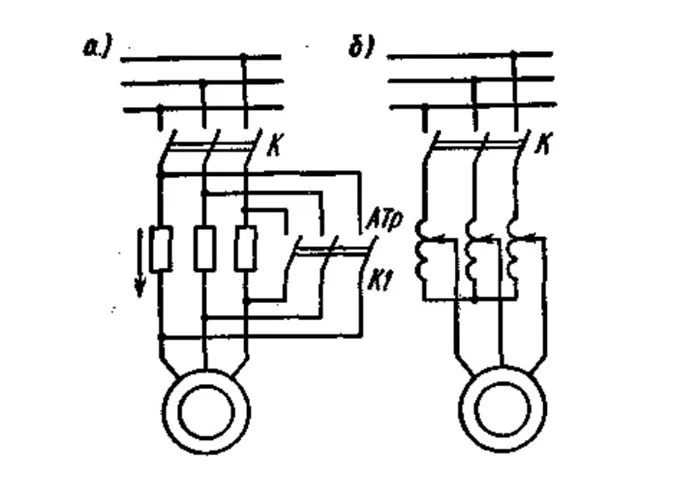
Основная выгода от реализации такого метода – предоставление возможности для разгона силового агрегата при уровне напряжения, практически равному тому, которое требуется для обеспечения нормального функционирования.
К слабым сторонам автотрансформаторного пуска стоит отнести весомое снижение уровней Мп и максимального момента. Эти показатели напрямую зависят от уровня напряжения питания: чем меньше ток в вольтах, тем меньше будут эти моменты. Исходя из этого, можно говорить о том, что при таких условиях агрегат с нагрузкой просто не произведет самозапуск.
Нельзя запускать асинхронный электродвигатель с фазным ротором сразу после короткого замыкания роторных обмоток. Этот метод приводит к появлению предельных пиковых токов.
Коэффициент мощности
Электродвигатель всегда потребляет активную мощность, которая преобразуется в механическую работу. Для намагничивания активной стали статора и ротора требуется реактивная мощность, которая является паразитной. На схеме активная и реактивная мощности представлены как P (активная) и Q (реактивная), которые совместно дают мощность S (полная). Соотношение между активной мощностью (кВт) и реактивной мощностью (кВА) называется коэффициентом мощности и обозначается как cos9. Нормальное значение этого коэффициента лежит в пределах 0,7-0,9, при этом небольшие электродвигатели имеют невысокое значение этого параметра, а мощные — высокое.
Скорость электродвигателя переменного тока зависит от двух параметров: количество полюсов обмотки статора и частоты напряжения питания. При частоте 50 Гц, электродвигатель будет работать со скоростью равной константе 6000 об./ мин., деленной на число полюсов, а при частоте 60 Гц, константа будет равна 7200 об/мин.
Крутящий момент
Пусковой крутящий момент мотора зависит от мощности электродвигателя. Для небольших электродвигателей мощностью до 30 кВт, он в 2,5-3 раза больше номинального крутящего момента. Для электродвигателей мощностью до 250 кВт типовое значение в 2-2,5 раза больше номинального крутящего момента. Более мощные электродвигатели имеют еще меньший пусковой крутящий момент, иногда даже меньше номинального. Такой электродвигатель невозможно пустить под нагрузкой даже путем пуска прямой подачи напряжения.
Это метод один из самых распространенных способов пуска электродвигателей. Пусковое оборудование состоит из главного контактора и теплового или электронного реле перегрузки. Недостатком этого метода является самый большой пусковой ток, превышающий номинальный в 6-7, а в некоторых случаях и в 10-12 раз. Помимо пускового тока возникает импульсный ток, превышающий номинальный ток в 14 раз. Эти величины зависят от конструкции и размера электродвигателя, при этом менее мощные электродвигатели имеют большие относительные пусковой и импульсный токи. При пуске прямой подачей напряжения пусковой крутящий момент также весьма велик и в большинстве случаев больше необходимого, что приводит к износу и выходу из строя приводимого оборудования.
Трехфазные односкоростные электродвигатели могут использоваться на двух напряжениях. Три фазные обмотки статора соединяются звездой (Y) или треугольником (D) (Рис. 2а и 2б).
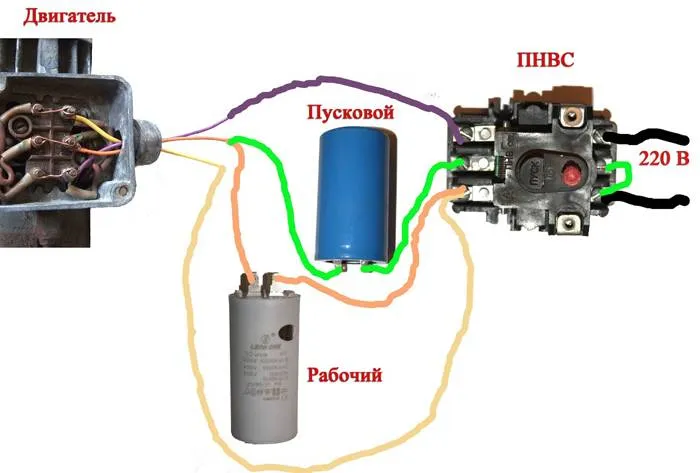
Соединение с фазосдвигающим компонентом
Как было сказано, в трехфазных сетях фазы сдвинуты относительно друг друга на 120о. В бытовых розетках это не встречается, поэтому необходимо произвести смещение искусственно.
Для пуска асинхронного двигателя с короткозамкнутым ротором используются фазосдвигающие элементы. Движок при этом может работать в однофазном темпе, либо в конденсатором. Посмотреть подключение можно на схемах ниже.
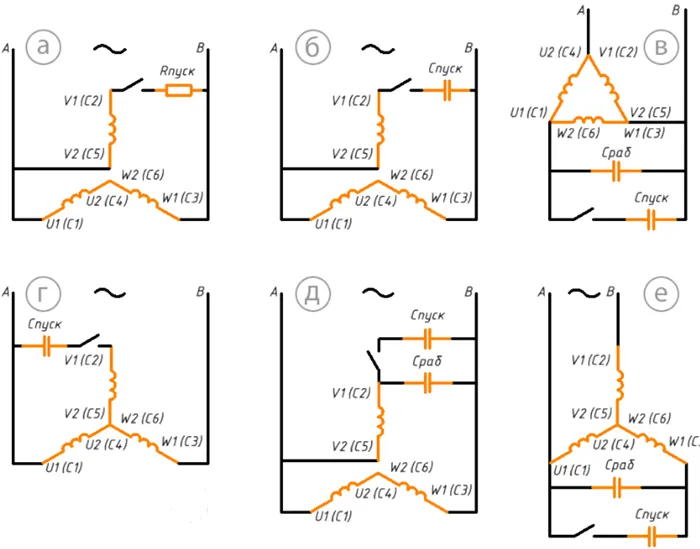
Схемы а. б и д используются в случае, если на корпус выведено всего 3 провода, т.е. соединение произведено внутри. В одном случае асинхроник будет работать в однофазном режиме, а мощность упадет на половину.
При конденсатором подключении, как на схемах подключения трехфазного двигателя В, Д и Е, мощность упадет только на 25-20%.
Расчет емкости конденсатора рассчитывается по следующим формулам. 1, 2, 3
- Iном – это фазный ток, при подключении к промышленной сети 380В.
- U1 – это напряжение в бытовой сети, т.е. 220В.
В этом используется способы пуска асинхронного через магнитный пускатель. В этом случае возможен относительно безопасный запуск и плавная работа. Дополнительно рекомендуется установить реле контроля тепла, который защитит движок, если поступаемый ток превысит номинальные границы.

Существуют схемы с реверсом и без него.
Схемы с реверсом
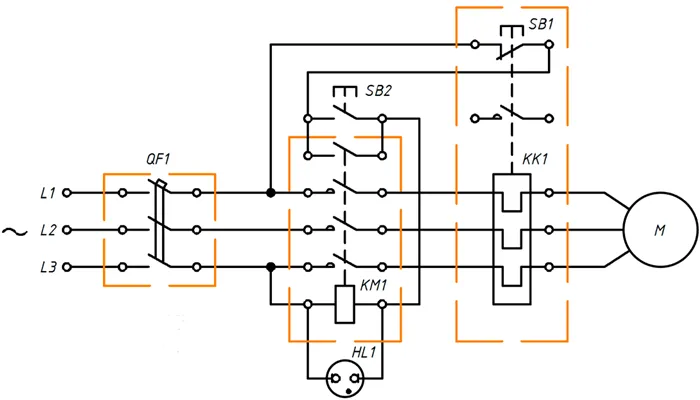
Пояснение принципа действия асинхронного двигателя с нереверсивной схемой подключения:
- L. Контактные площадки для подключения к сети.
- QF 1. Выключатель-автомат.
- SB 1. Аварийная остановка.
- SB 2. Пауза.
- КМ 1. Магнитный пускатель.
- КК 1 . Реле теплового контроля.
- HL 1. Контрольная лампочка.
- М. Сам двигатель.
Реверсивная схема
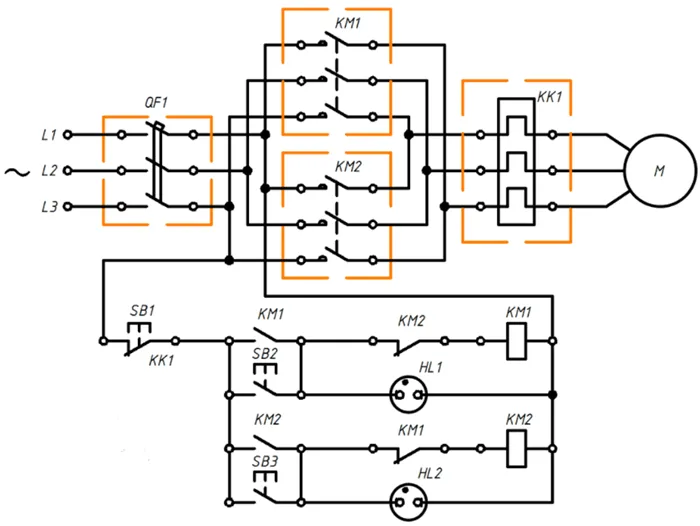
Схема реверсивного пускателя:
- L. Контактные площадки для подключения к сети.
- QF 1. Выключатель-автомат.
- КМ. Магнитный пускатель.
- КК 1. Реле теплового контроля.
- М. Двигатель.
- SB 1. Остановка.
- SB 2. Движение «Вперед».
- SB 3. Реверс.
- HL. Контрольные лампочки.
Отмечается резкое падение напряжения, чем вызывается высокий рост переходного тока при подключении полного напряжения. Чтобы преодолеть этот недостаток, магнитная цепь автотрансформатора выполняется с воздушным зазором.
Звезда-треугольник
Схема «звезда-треугольник» подразумевает двухэтапное безопасное подключение электрического двигателя:
- Сперва мотор запускается в рамках схемы «Звезда», которая подразумевает использование низких пусковых токов. Некоторое время двигатель питается по этой схеме и плавно набирает обороты.
- После набора определенного числа оборотов в минуту мотор переключается на схему «Треугольник», которая требует для работы высокие пусковые токи. Здесь двигатель выходит на проектную мощность.
Для реализации данной схемы пуска потребуется трехполюсный выключатель, три контактора, тепловое реле и реле времени. Преимущества этого типа запуска аналогичны преимуществам плавного пуска, описанного выше.
Частотное регулирование
Под частотным регулированием понимание использование частотно-управляемого привода. Данное устройство регулирует частоту вращения ротора электромотора. В конструкцию частотного преобразователя входит инвертор и выпрямитель. К преимуществам запуска двигателя через частотное регулирование относится большой выбор значений для регулировки количества оборотов, увеличение ресурса мотора, максимальный пусковой момент и экономия электрической энергии по сравнению с другими способами запуска мотора.
Недостатки у частотного регулирования также имеются. Это сравнительно высокая цена преобразователей для мощных моторов, а также высокий уровень помех, которые наблюдаются поблизости от этих устройств.







