Решение задачи оптимального управления математической теории, в к рой управляющее воздействие u=u(t).формируется в виде функции времени (тем самым предполагается, что по ходу процесса никакой информации, кроме заданной в самом начале, в систему… … Математическая энциклопедия
Управление векторным асинхронным двигателем, применение и способы
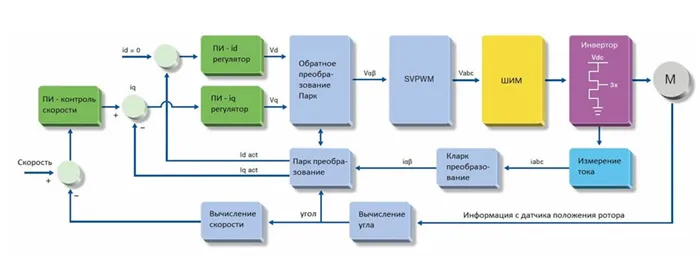
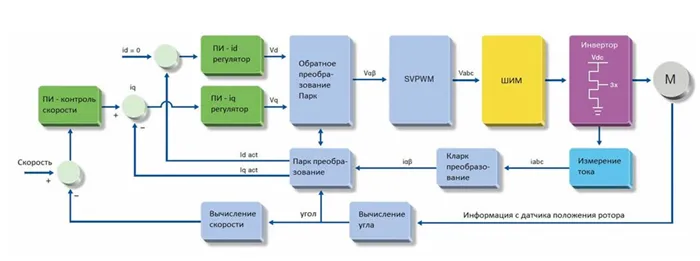
Для понимания что такое «векторное» управление — реакция ворочающего устройства с так величаемым «пространственным» вектором, что вертится с частотой сферы двигателя. И чтобы лучше понимать все его функции желательно пересмотреть статью и найти нужную информацию.
Асинхронный движок — двигатель переменчивого течения, где энергетика в намотках статора творят вертящееся поле магнитов. Такое поле индуктирует потоки в намотке ротора, воздействует на работающие токи, притягивая в работу ротор.
Впрочем, дабы в работающем роторе, ворочающееся магнитная сфера статора, индуктировала токи, ротор в аппаратном кружении принужден чуть-чуть опаздывать от кружений статора. Следовательно, в несинхронном моторе быстрота циркуляции ротора постоянно примерно такая как в стремительности верчения магнитного поля (что обусловливается импульсами неустойчивого тока, из-за чего и питается движок). Когда отход ротора от движущегося магнитного поля статора будет больше (скатывание) следовательно создастся сильная нагрузка на моторчик.
Недостаток синхронности промеж кручением ротора и магнитов в статоре нормальная черта для нестабильного моторчика, от чего и походит его название. Ворочающееся магниты в статоре образовывается с использованием обвивок, питаемых потоками, сомкнутыми по фазе.
Естественно ради данной миссии приспосабливается 3х фазный неустойчивый ток. Существует вдобавок одно фазные асинхронные моторчики, в каких прогресс фаз посреди токов в обвивках формируется подключением всевозможных жвавых противодействий в обмотке. Осуществить качественную настройку угловой стремительности вращения ротора, и еще вращающего фактора на валу нынешних бесщёточным моторов, употребляют или векторное, или скалярное регулирование электронным приводом.
Векторное управление-способ управления бесщеточными моторами неустойчивого тока, какой разрешает самостоятельно и в принципе безынерционной координировать быстроту верчения и момент на валу электродвигателя.
Ключевая мысль векториального движения охватывается в том, дабы проверять не лишь величину и импульс усилия питания, но также и фазу. Иными словами испытывается значение и угол пластического вектора.
Превосходства векторного управления:
- высочайшая достоверность регулирования быстроты;
- гладкий момент начала движения и плавное обращение мотора во всем спектре частот;
- скорая подавленность на замене нагрузки: при изменении перегрузки абсолютно не случается изменения скорости;
- усиленный спектр управления и пунктуальность регулирования;
- снижаются утечки на нагревании и намагничивание, увеличивается КПД электродвигателя.
- потребность настраивать параметры электродвигателя;
- огромные качания стремительности при долговременной нагрузке;
- высокая вычислительная сложность.
Чтобы избавится от минусов, в дальнем 1971 г. инженеры фирмы Simens рекомендовали пользоваться векторным руководством в инструменте, в ходе чего управление исполняется с возвратной связью значений в потоке. Первоначальные налаженности векториального направления держали в себе детекторы в инструментах. Сейчас подход к такому способу изрядно другой:
Как можно управлять скоростью вращения двигателя?
Очевидно, что двигатель в обычном режиме работы от сети (электрического шкафа) имеет стандартную скорость/частоту вращения. Это ограничивает прямое его использование, вынуждая применять различные редукторные механизмы для понижения частоты до требуемой. Но даже тогда нет возможности динамично менять обороты, а вместе с ними, мощность, подачу, поскольку все равно остаются фиксированными частоты на выходе из двигателя и редуктора. Для расширения существующих рамок используют разные способы управления (частотные, импульсные, фазные и т. д), которые можно разделить на две большие группы:
- Скалярное. Как правило, используется на приводных двигателях компрессорных, вентиляторных, насосных и прочих механизмов, где требуется контроль скорости вращения или любого другого параметра, связанного с датчиками,
- Векторное. Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.
Управление асинхронным двигателем
Отличие скалярного от векторного управления как раз заключается в возможности осуществления контроля возбуждения (потока). Фактически, он представляется как двигатель постоянного тока, имеющий независимые друг от друга обмотки. Такой подход позволяет создать подобную математическую модель системы работы контроллера.
Формы и схема векторного управления
Все существующие на сегодня системы векторного управления работой двигателей можно разделить на две группы:
- Датчиковые. Блок управления работой двигателя имеет с ним обратную связь по скорости, с помощью расположения на валу соответствующих датчиков,
- Бездатчиковые. Это системы, которые работают без датчиков скорости на основном валу.
Датчиковые системы являются более сложными, так как точность контроля составляет 1:10000. Бездатчиковые системы работают на уровне не более 1:100. Все частотники с учетом уровня создаваемых помех устанавливаются в центральных или отдельных шкафах.
Если представить все выше сказанное как наглядную схему, то получится нечто следующее:
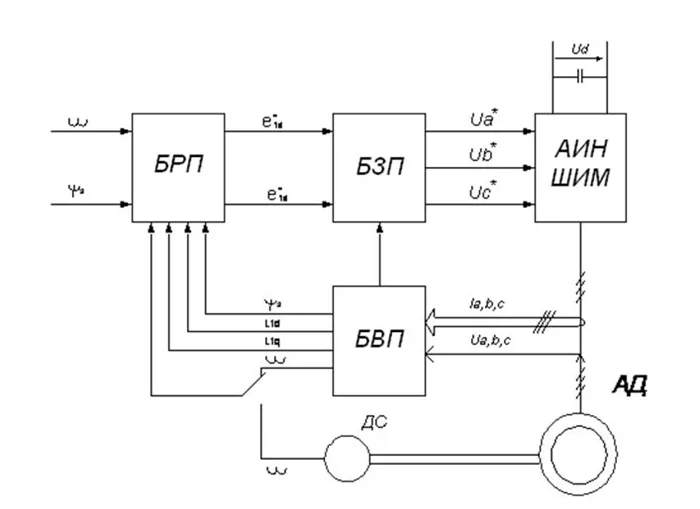
Здесь можно видеть такие ключевые компоненты системы управления, как:
- АД – собственно, асинхронный двигатель (объект контроля),
- БРП – логический блок регуляторов для переменных уравнения,
- БВП – логический блок, отвечающий за вычисления по переменным,
- БЗП – блок, задающий значения переменных,
- ДС – датчик скорости на валу двигателя,
- АИН ШИМ – блок амплитудно-импульсной/широтно-импульсной модуляции.
То, что на схеме отображено в виде блоков, на практике является всего лишь параметрическими элементами цепи управления, которая реализуется на микроконтроллере. Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.
Поскольку такой переход так или иначе влияет на форму графика выходного напряжения, то блочный контроллер/частотник может использовать в схеме дросселя и специальные ЕМС фильтры. Последние применяют для снижения интенсивности электромагнитных помех.
Варианты режимов работы векторного управления
Векторное управление подразумевает наличие в звене управления математической модели (далее — ММ) регулируемого электродвигателя. В зависимости от условий эксплуатации электропривода возможно управление электродвигателем как в режимах с обычной точностью, так и в режимах с повышенной точностью отработки задания на скорость или момент.
Точность математической модели электродвигателя
В связи с вышесказанным представляется возможным произвести классификационное разделение режимов управления по точности ММ электродвигателя, используемой в звене управления:
- использование ММ без дополнительных уточняющих измерений устройством управления параметров электродвигателя (используются лишь типовые данные двигателя, введенные пользователем)
- использование ММ с дополнительными уточняющими измерениями устройством управления параметров электродвигателя (т.е. активных и реактивных сопротивлений статора/ротора, напряжения и токадвигателя)
Использование датчика скорости электродвигателя
В зависимости от наличия или отсутствия датчика обратной связи по скорости (датчика скорости) векторное управление можно разделить на:
- управление двигателем без датчика скорости — при этом устройством управления используются данные ММ двигателя и значения, полученные при измерении токастатора и/или ротора
- управление двигателем с датчиком скорости — при этом устройством используются не только значения, полученные при измерении токастатора и/или ротораэлектродвигателя (как в предыдущем случае), но и данные о скорости (положении) ротора от датчика , что в некоторых задачах управления позволяет повысить точности отработки электроприводом задания скорости (положения).
В целом, векторное управление, организованное на современном контроллере и преобразователе частоты, позволяет добиться плавного регулирования ключевых величин, а также побочных параметров работы оборудования. Ввиду наличия электромагнитных помех при работе, частотники обычно размещают отдельно от основного электрического шкафа.
Классифицирование технологий векториального управления
Здесь рассматриваются исключительно самые знаменитые технологии управления. Обговариваемые способы контроля фактора презентованы для систем управления асинхронными движками и синхронными моторами с долговременными магнитами с синусоидальной возвратной ЭДС.
Чаще всего способы регулировки моментом распределяют на такие виды:
- Линейные (ПИ, ПИД) регуляторы;
- Нелинейные (гистерезисные) регуляторы.
- Без возвратной связи.
- Имеется обратная связь.
- В установившемся строю.
Векторное регулирование подробности
Чтобы избавится от минусов, в дальнем 1971 г. инженеры фирмы Simens рекомендовали пользоваться векторным руководством в инструменте, в ходе чего управление исполняется с возвратной связью значений в потоке. Первоначальные налаженности векториального направления держали в себе детекторы в инструментах. Сейчас подход к такому способу изрядно другой:
- точный образец мотора разрешает разбирать быстроту циркуляции ротора и валовый момент из исходной стадии существующих токов фаз (с повторяемости и количества токов в намотках статора).
Такой больше сознательный подход помогает сотворить безотносительно и практически безинерционно координировать и валовый момент, вдобавок и быстроту циркуляции вала на силу напора, так как в течении управления предусматриваются фазы потоков. Кой-что побольше исполнительные налаженности векторного распоряжения обустроены принципиальными методами возвратной связи на силу движения, также системы руководства без измерителей стремительности называются без датчиковыми.
В связи с участками употребления любого из электроприводов, их методика векторного управления должно быть будет обладать своими особенностями, также какую-то нужную ступень точности для управления. Ежели условия к действительности регулировки стремительности дозволяют уклон к 1,5%, а масштаб регуляции — не выше 1 к 100, тогда бездатчиковая конструкция абсолютно будет преклонной. Когда же необходима верность регулировки быстроты со сдвигом не выше 0,2%, а спектр объединяется до 1 к 10000, то важно существование возвратной связи по измерителю быстроты на валу.
Присутствие коннектора стремительности в примерах векторного управления разрешает идеально координировать начало и при малых проводимостях до 1 Гц. Что ж, векториальное регулирование доставляет надлежащие преимущества. Высочайшую точность регулирования стремительностью верчения ротора (и без измерителя быстроты на аппарате) в условиях подвижно сменный перегрузки на валу, поэтому рывков не ожидается. Легкое и прямое обращение вала на незначительных оборотах.
Большой КПД в для невысоких утрат в нормальной среде этих усилия питания. На векторное регулирование приходятся и минусы. Запутанность вычислительных действий. Потребность создать исходные параметры (к примеру контролируемого привода).
Для количественного электронного привода векториальное регулирование не подойдет, тут предпочтительно будет использоваться скалярное.
Результат случается из-за явления в цилиндре токи циркуляции. Так как кажется в законе электромагнитной индукции, обнаруженного Фарадеем, чтобы заменить поток магнитов изолированного силуэта в середине является ЭДС или напряжение. Это значение, употребительно к медному цилиндру, мгновенно активизирует происхождение в цилиндре тока.
Также данное течение тоже организовывает свое, встречный электромагнитный поток, сосредоточенный прямо в иной край от замены потока магнита:
- Высокочастотный ток, появляющийся в изолированном коротающем контуре, обладает подобной стороной движения, что и созданное им поле магнитов действует сопротивление этой смене магнитного потока, что был активизирован с помощью данного тока.
- Закрытый очерк противится перемене магнитного течения в инструменте.
- Ежели быстро поставить магнит к медному цилиндру, тогда осуществляется дерзкое модифицирование магнитного течения, так в цилиндре протекут подобные встречные стремления, тогда магнитная сфера в нем при начале движения будет одинаково нулю: магнитное поле приближенного магнита будет абсолютно возмещено магнитными токами цилиндра.
Но при данном способе управления изменения параметров двигателя в процессе работы (изменение сопротивления и индуктивности обмоток) не позволяют добиться таких же динамических характеристик, как при управлении инвертором, выступающем в качестве источника тока.
Основной минус скалярной вольт-частотной характеристики
У линейной и квадратичной вольт-частотной зависимости, при её простоте и широком распространении, есть большой минус – падение мощности на валу, а значит падение момента и частоты вращения двигателя. При этом происходит так называемое скольжение, когда частота вращения ротора отстает от частоты вращения электромагнитного поля.
Для устранения этого эффекта используется компенсация скольжения, позволяющая скорректировать выходную частоту (обороты двигателя) при возрастании момента нагрузки. Если правильно выбрать значение компенсации, фактическая скорость вращения при большой нагрузке будет приближаться к скорости вращения на холостом ходу.
Кроме этого, в большинстве ПЧ с линейной вольт-частотной характеристикой имеется функция компенсации момента на низких скоростях. Данная функция реализуется за счет повышения напряжения на низких частотах и при неправильном применении может вызвать перегрев двигателя.
Оба параметра компенсации имеют неизменное (установленное при настройке) значение и от нагрузки не зависят.
Преимущества векторного управления
Существует множество задач, когда нужно обеспечить заданную частоту вращения, и описанный недостаток становится очень актуальным. В таких случаях применяют векторное частотное управление, при котором контроллер вычисляет напряжение, необходимое для поддержания момента, обеспечивающего стабильную частоту. В отличие от скалярного режима, здесь происходит «умное» управление магнитным потоком ротора.
Векторное управление асинхронным двигателем особенно актуально на низких частотах – ниже 10 Гц, когда рабочий момент двигателя сильно падает. Кроме того, данный метод позволяет держать стабильную скорость (с предсказуемым линейным изменением) при разгоне. Это достигается за счет получения высокого пускового момента вплоть до выхода двигателя на режим.
Важно и то, что при векторном управлении происходит сбережение электроэнергии (в некоторых случаях – до 60%), поскольку большую часть времени частотный преобразователь передает в двигатель ровно столько энергии, сколько необходимо для поддержания заданной скорости.
Различают два вида векторного управления — без датчика скорости (без обратной связи, или бессенсорное) и с обратной связью, когда в качестве датчика, как правило, используется энкодер.
– неподвижные оси статора;
d,q
– вращающиеся оси ротора;
φ
– угол поворота ротора; — угловая скорость ротора;
Частотник векторный или скалярный . Различия
Техническим стандартом, по которому можно классифицировать современные преобразователи частоты (иначе, частотники или ПЧ, как их сокращенно называют) является метод управления, применяемый в этих устройствах при регулировании скорости вращения двигателя.
Методы управления подразделяются на:
О различии скалярного и векторного управления электроприводом можно догадаться уже по их названию.
- Скалярный метод основан на поддержании постоянства отношения (U/f) в рабочих диапазонах скоростей, в процессе которого ведется контроль, как видно из формулы, только за величиной питающего напряжения и его частотой.
- При векторном методе управления ведется контроль не только за величиной и частотой, но и за фазой питающего напряжения. Иначе говоря, контролируется угол и величина так называемого пространственного вектора, который вращается с частотой поля двигателя.
Скалярное управление наиболее применимо в электроприводах небольшой сложности в силу относительной простоты и минимального набора требуемых для работы функциональных параметров. Подходит для применений, где требуется поддерживать постоянство (с ограниченным диапазоном и точностью, по сравнению с векторным) определенной технологической величины, и где отсутствуют большие динамические нагрузки.
Векторный метод управления относительно скалярного имеет бóльшую производительность, диапазон и точность регулирования, в том числе на малых оборотах двигателя, чем перекрывает практически все недостатки скалярного принципа управления.
Тот или иной метод управления выбирается в зависимости от требований, которые заданы для технологического процесса – это глубина и точность регулирования, необходимость управления моментом на валу двигателя, состояние привода при переходных процессах – при пуске/стопе, ускорении, торможении.
Скалярный метод управления
Скалярный метод управления применяют для приводов малой и средней мощности с вентиляторной нагрузкой (т.е. для вентиляторов, насосов, компрессоров, дымососов с легким, либо нормальным режимом работы). Что особенно важно, при использовании скалярного метода имеется возможность управления многодвигательными приводами от одного преобразователя частоты. Жесткость статических характеристик привода практически приближена к естественной характеристике. Диапазон скалярного принципа управления, при котором возможно регулирование оборотов двигателя, без потери момента сопротивления не превышает 1:10. Благодаря этому достигается постоянная перегрузочная способность двигателя, которая не зависит от частоты приложенного напряжения, но на низких частотах может произойти перегрев двигателя и снижение развиваемого им момента. Для того чтобы этого избежать, производят установку ограничения минимального значения выходной частоты.
Изменение напряжения питания электродвигателя
при скалярном управлении
При необходимости увеличения жёсткости характеристики и расширения границ регулирования применяют различные аналоговые или импульсные датчики скорости. Для этого в преобразователях частоты имеются дискретно-аналоговые управляющие входы.
Преобразователи частоты, управление в которых реализовано на методе скалярного управления, как правило, невысокой стоимости, более простые и широко применимы в электроприводе, где отсутствуют критичные требования к точности и диапазону регулирования. При вводе в работу подобных преобразователей достаточно учитывать лишь номинальные величины параметров электропривода, осуществить настройку стандартных опций защиты и управления.
Учитывая вышеназванные особенности, можно рассмотреть следующие возможности применения для скалярного управления частотным преобразователем:
Системы водоснабжения и водоотведения представляют собой довольно сложную технологическую структуру, основные элементы которой – трубопроводные магистрали и насосные установки.

Электропривод насосных установок
Применение скалярного метода управления для выполнения плавного пуска, торможения и регулирования скорости вращения привода насосов снижает интенсивность гидравлических ударов, что позволяет сократить количество профилактических ремонтов оборудования и вероятность аварийных ситуаций, связанных с механическими нагрузками (преждевременный износ муфт, редукторов, подшипников двигателей).
При увеличении скорости напряжения питания статора пропорционально увеличивается. Скалярное управление способствует удержанию постоянства момента на валу в рабочем диапазоне частот (но на невысоких скоростях момент снижается, для этого в преобразователях частоты есть возможность задания момента для нижней границы скорости).
Для насосных систем имеется возможность настройки в ПЧ следующих полезных функций (в особенности, для тех ПЧ, которые предназначены для систем отопления, вентиляции и кондиционирования – так называемые HVAC системы):
-
Функция сна/пробуждения ПЧ
Позволяет остановить асинхронный двигатель в периоды отсутствия, либо существенного уменьшения расхода воды. Тем самым обеспечивается экономия электроэнергии и уменьшается износ оборудования.
В случае этого метода управления позиция ротора ρr, необходимая для трансформации координат, получается на основании измеренных значений токов статора, используя модель потока.
Похожие статьи
Исследование системы векторного управления.
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления.
Математическое моделирование электропривода на базе.
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления.
Современные проблемы разработки электропривода
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия.
Пространственные векторы в асинхронном двигателе
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия.
Разработка частотно-регулируемого асинхронного.
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора.
Пространственные векторы в асинхронном двигателе.
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия.







