Шкальное управление просто и дешево в реализации, но имеет недостатки в виде медленной реакции на изменение нагрузки и узкого диапазона регулирования. Поэтому ступенчатое управление обычно используется в тех случаях, когда нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентилятором).
Расчетные формулы основных параметров асинхронных двигателей
Одновременные уравнения электропривода приводятся в форме Коши, одновременно заменяя ток обмотки на функцию ограничения потока в катушке.
В качестве альтернативы можно подставить текущее уравнение
D путем подстановки полученных токов и моментов в уравнение.1 = L1 L2-L 2m , мы получаем:.
Последнее уравнение можно считать уравнением состояния двигателя. Переменными состояния здесь являются проекция движения потока на прямоугольную ось и угловая частота курсора. Внешними воздействиями на двигатель являются напряжения в статоре и тяговый момент.
Эти уравнения являются нелинейными (с участием произведения переменных состояния) и не имеют общего решения. Переходные процессы в двигателе обычно исследуются с помощью компьютерного моделирования.
Передаточная функция асинхронного электродвигателя
Структурная схема АД может быть создана путем перехода от системы дифференциальных уравнений к векторным уравнениям.
Рассмотрим динамику двигателя AD при регулировании напряжения, подаваемого на обмотку статора. Электромагнитными переходами пренебрегают и рассматривают только электромеханические процессы. В целом, вращающий момент двигателя является функцией скорости вращения и напряжения на выводах обмотки статора, в то время как статический резистивный момент зависит от скорости вращения.
Изменение напряжения, подаваемого на обмотку статора D U, вызывает соответствующее изменение крутящего момента и скорости.
Для одиночных сигналов D U (p) = U (p) и DW (p) = W (p). Передаточная функция двигателя AD при проверке напряжения, приложенного к обмотке статора, выглядит следующим образом
Обратите внимание, что kDV и Tem являются переменными, и их значения зависят от того, для какой механической характеристики проводится испытание.
Совет: Классификация сварочных сплавов, технические характеристики и процедура выбора
Функции управления частотно-регулируемыми двигателями
Из-за значительной нелинейности, связанной с преобразованием сигнала привода в частоту напряжения двигателя, невозможно точно представить передаточную функцию двигателя, выполняющего электромагнитные и механические переходы с частотным регулированием.
Эта проблема также осложняется наличием двух контуров управления для двух взаимосвязанных входов напряжения и амплитуды частоты. Поэтому методы компьютерного моделирования особенно важны в случае частотно-регулируемых движений.
Для небольших изменений частоты напряжения Dw1неактивные составляющие игнорируются, и изменяются только активные составляющие тока ротора. Значения второго порядка малости игнорируются. Таким образом, исследуется вращение ротора в магнитном поле постоянной амплитуды, вращающемся с заданной частотой при ступенчатом изменении частоты питающего напряжения. Передаточная функция при предполагаемых условиях:.
Где a = g2/ s L2; b = Lm/ s L2; d = 2 J / (3 p 2 Lm); Imb0 это установившийся ток намагничивания.
9.5 Вращательный (электромагнитный) момент асинхронных двигателей
Рассмотрим схему питания трехфазного двигателя AD.
В данной схеме используются следующие ссылки
P1 — эффективная мощность, поглощаемая двигателем из сети.
Pel1, P el2 — электрические потери в обмотках статора и ротора,
Pem — это электромагнитная мощность, передаваемая электромагнитом ротору,
Pmx— полная механическая мощность,
Pmech, Рбарабан — механические и дополнительные потери,
P2 — эффективная мощность на валу.
Пусковые характеристики двигателя показаны на рисунке.
Максимальное значение крутящего момента соответствует определенному скольжению s krкоторый называется критическим скольжением. Критическое скольжение в значительной степени определяется величиной омического сопротивления обмотки ротора.
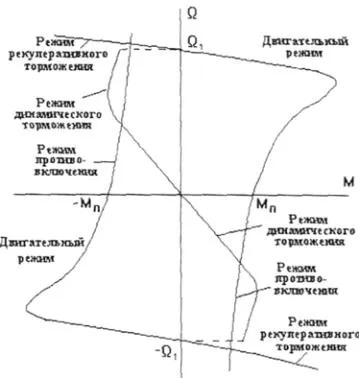
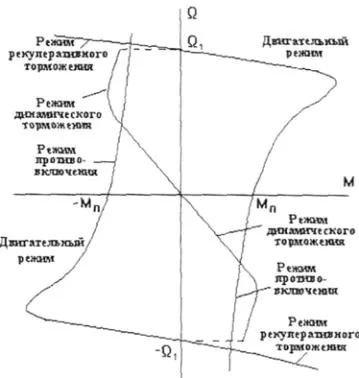
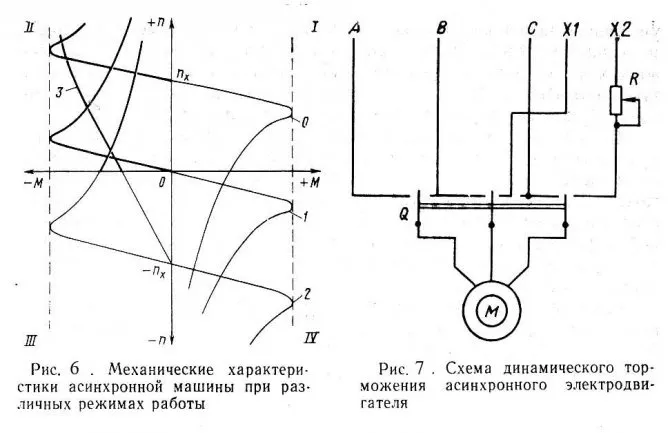
Режимы работы асинхронных машин
Направление вращения асинхронного электродвигателя с прямой последовательностью фаз (a — b — c) предполагается положительным (первый квадрант), а с обратной последовательностью фаз (a — c — b) — отрицательным (третий квадрант). Во втором и четвертом квадрантах представлены характеристики режимов торможения.
Работа двигателя
Работа двигателя характеризуется изменением частоты вращения двигателя от нуля (начальная точка) до W1 (идеальная точка холостого хода) с соответствующим изменением крутящего момента (тока) от M запустить ( I запустить) к нулю.
Устойчивая работа обеспечивается частью механической характеристики двигателя в диапазоне изменения скольжения от нуля до s kp。
Кривые производительности для асинхронных двигателей основаны на фактической мощности двигателя P 2。
Рекуперативное торможение
Рекуперативное торможение (рекуперативный режим) при питании от сети происходит, когда скорость ротора асинхронного двигателя превышает синхронную скорость W1。 При работе генератора скольжение s
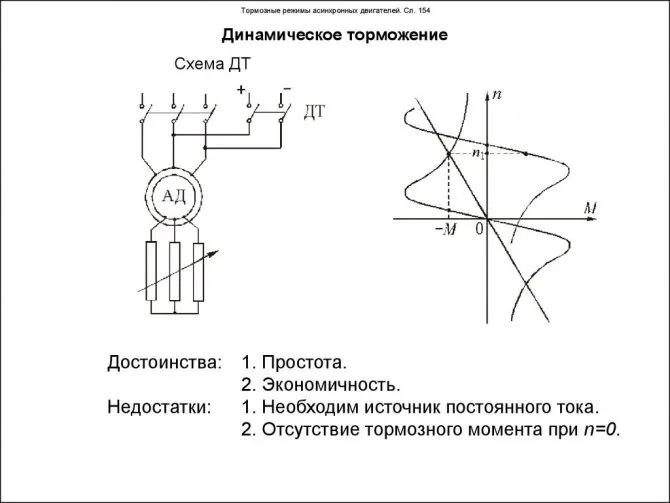
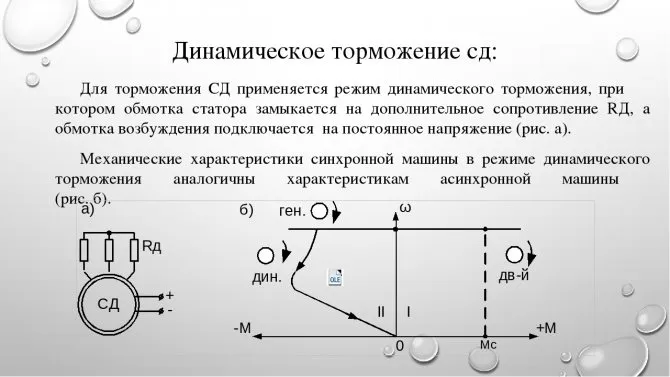
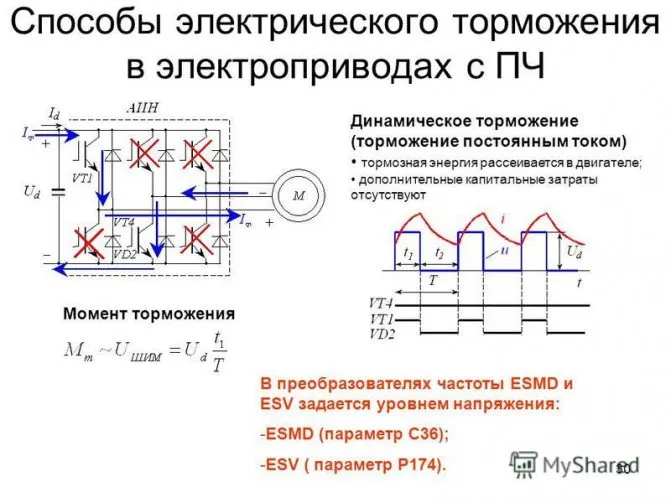
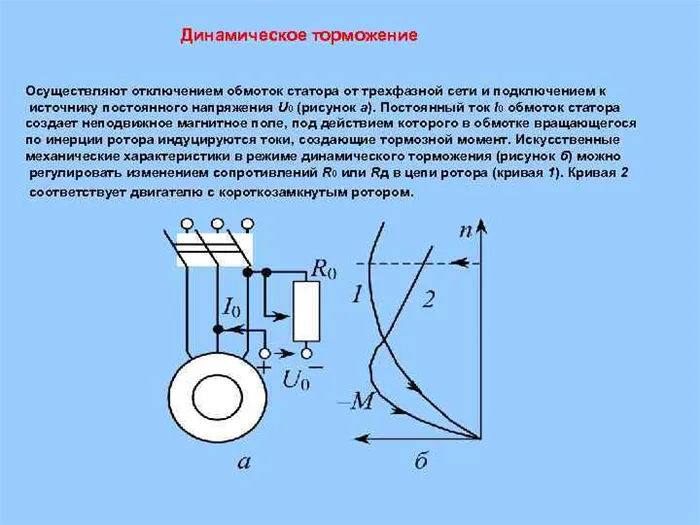
Динамическое торможение
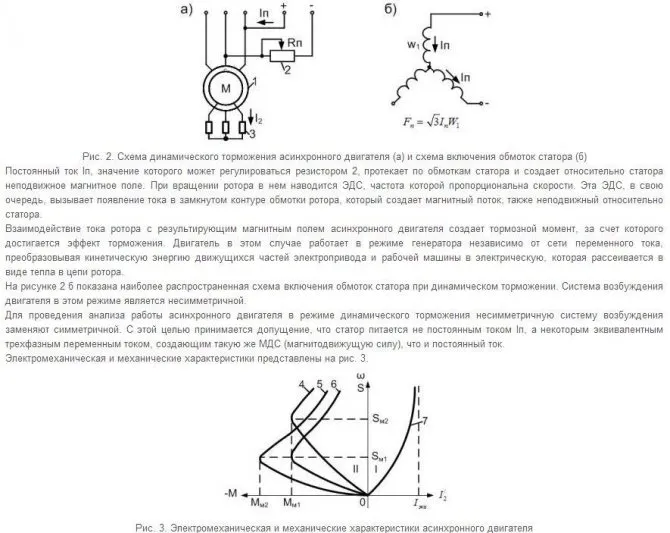
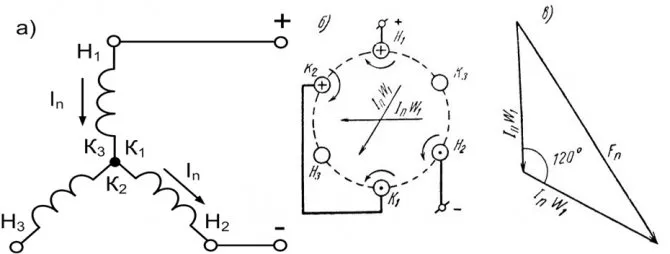
Динамическое торможение используется для быстрой остановки вращающегося двигателя. Динамическое торможение осуществляется следующим образом: Фазы статора отключаются от сети переменного тока, а одна фаза, если она нулевая, или две фазы, соединенные последовательно, подключаются к сети постоянного тока. Постоянный ток создает магнитное поле, фиксированное в пространстве, в котором вращается ротор. Возникает тормозной момент, и двигатель останавливается.
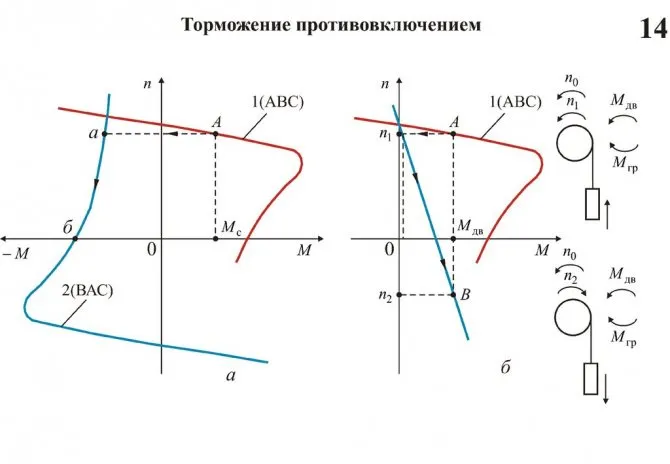
Торможение при обратном токе
Противоточное торможение происходит, когда во вращающемся двигателе переключаются две фазы обмотки статора, заставляя поле статора вращаться в противоположных направлениях, ротор и поле статора вращаются в противоположных направлениях. При работе в противотоке скольжение s >l. Двигатель потребляет определенную активную мощность из сети и в то же время потребляет механическую мощность вращающегося ротора. Обе эти силы преобразуются в потери, так как эффективная мощность равна нулю. Ротор энергично тормозит. Если фазы обмотки статора не будут отключены в момент, когда s = 1, ротор будет ускоряться в направлении, противоположном первоначальному направлению вращения, и произойдет реверс двигателя.
Максимальное значение крутящего момента соответствует определенному скольжению s krкоторый называется критическим скольжением. Критическое скольжение в значительной степени определяется величиной омического сопротивления обмотки ротора.
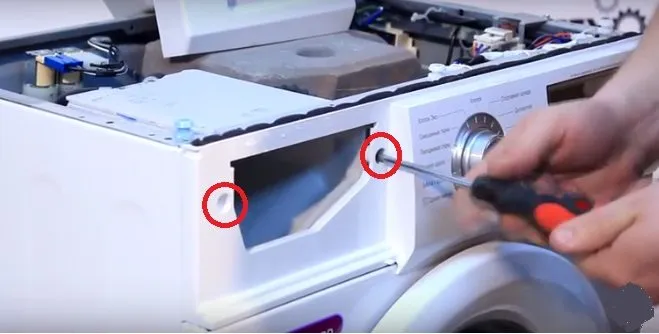
Подключение асинхронного двигателя
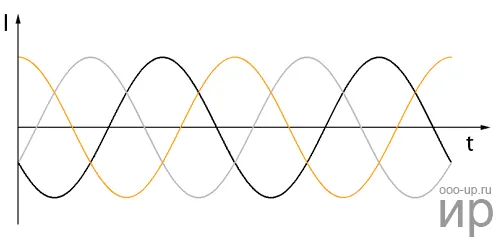
Трехфазный переменный ток
Трехфазный переменный ток является наиболее распространенным типом системы передачи. Основным преимуществом трехфазных систем по сравнению с однофазными и двухфазными системами является их эффективность. В трехфазной цепи мощность проходит по трем проводникам, а токи в различных проводниках смещены друг относительно друга на 120°, поэтому синусоидальные ВЭД различных фаз имеют одинаковую частоту и одинаковую амплитуду.
Звезда и дельта
Обмотки статора трехфазных двигателей соединяются в звезду или треугольник, в зависимости от напряжения питания. Концы трехфазных обмоток: соединены внутри двигателя (три провода выходят из двигателя), приводятся в движение (шесть проводов выходят из двигателя), подключены к распределительной коробке (шесть проводов выходят из коробки), три выходят из коробки ).
Фазное напряжение — это разность потенциалов между началом и концом фазы. Другое определение соединения звездой: фазное напряжение — это разность потенциалов между линейным проводом и нейтралью (обратите внимание, что в треугольном соединении нейтраль отсутствует).
Напряжение сети — это разность потенциалов между двумя проводниками линии (между фазами).
| Звезда | Delta | Назначение |
|---|---|---|
| Uл, Uф -линейное и фазное напряжение, В,. | ||
| Iл, Iф -линейный и фазный ток, A, I | ||
| S — полная мощность, Вт | ||
| P — эффективная мощность, W |
ВНИМАНИЕ: Хотя мощность для соединений «звезда» и «треугольник» рассчитывается по одной и той же формуле, подключение одного и того же двигателя к одной и той же установке разными способами приведет к разному потреблению мощности. Неправильное подключение может привести к расплавлению обмоток статора.
Пример: предположим, что электродвигатель подключен к 3-фазной сети переменного тока с помощью узла «звезда».л= 380 В (или Uф= 220 В) и потребляет ток Iл= 1А. общая потребляемая мощность:.
Теперь измените схему соединения на треугольник. Напряжение сети остается неизменным uл= 380 В, но напряжение между фазами увеличивается в три раза (маршрут 3) Uф= Uл= 380 В. Увеличение фазного напряжения увеличивает фазный ток в три раза. Поэтому линейный ток в треугольной цепи в три раза выше, чем линейный ток в звездообразной цепи. Соответственно, потребление энергии также в три раза выше.
Если двигатель рассчитан на 3-фазное соединение звездой переменного тока, треугольное соединение может повредить двигатель.
Управление асинхронным двигателем
-
Способы подключения асинхронного электродвигателя к сети питания:
- Подключение через пускатель плавного пуска
Прямое подключение к сети
Магнитные пускатели можно использовать для управления асинхронными двигателями, подключая двигатель непосредственно к сети переменного тока.
Магнитные пускатели можно использовать для реализации схем.
Тепловые реле могут использоваться для защиты двигателя от токов, значительно превышающих номинальное значение.
Необратимые цепи
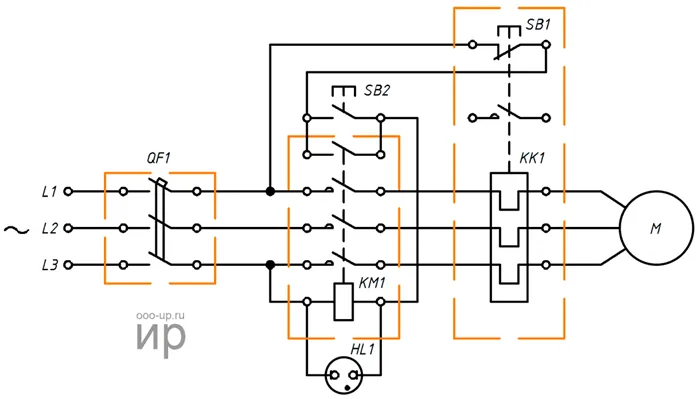
Схема подключения 3-фазного асинхронного электродвигателя к 3-фазной сети переменного тока через магнитные пускатели L1, L2 и L3 — контакты для подключения к 3-фазной сети переменного тока, QF1 — выключатель питания, SB1 — кнопка стоп, SB2 — кнопка пуск, кнопка пуск, KK1 — тепловое реле, HL1 — сигнальная лампочка, M -Трехфазный асинхронный двигатель
Реверсивная цепь
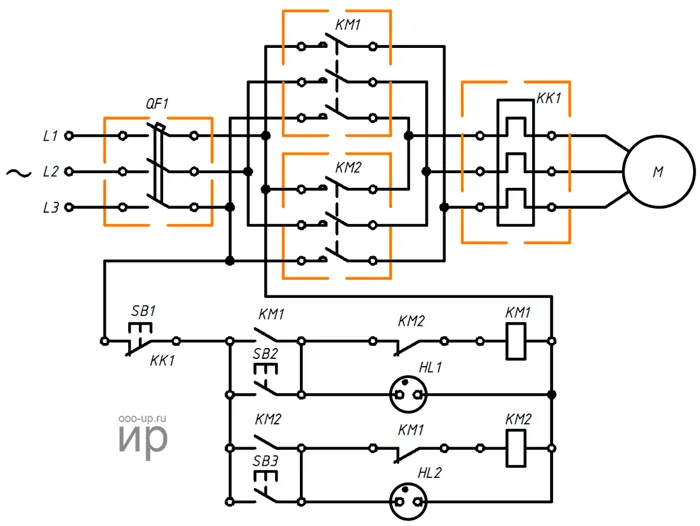
Реверсивная электрическая схема для подключения 3-фазного асинхронного двигателя к 3-фазной сети переменного тока через магнитные пускатели L1, L2, L3 — контакты для подключения к 3-фазной сети переменного тока, QF1 — выключатель питания, KM1, KM2 — магнитные пускатели, M-3 — фазный асинхронный двигатель, SB1 — кнопка стоп, SB2 — пуск вперед кнопка, SB3 — кнопка запуска заднего хода, HL1, HL2 — индикаторные лампы
Недостатком прямого переключения между сетью и обмоткой асинхронного двигателя является высокий пусковой ток, возникающий при запуске электродвигателя.
Устройство плавного пуска для асинхронных двигателей
В тех случаях, когда скорость двигателя не нужно регулировать во время работы, для снижения пускового тока используются плавные пускатели.
Плавные пускатели защищают асинхронные двигатели от повреждений, вызванных внезапным увеличением потребляемой мощности во время пуска, и ограничивают пусковой ток. Плавные пускатели позволяют асинхронным двигателям плавно ускоряться и замедляться.
Устройства плавного пуска дешевле и компактнее, чем преобразователи частоты. Они используются, когда регулировка скорости и крутящего момента требуется только при запуске.
Частотное управление асинхронными двигателями
Частотные преобразователи используются для управления скоростью и моментом асинхронных двигателей. Принцип работы преобразователей частоты основан на изменении частоты и напряжения переменного тока.
-
Использование частотного преобразователя позволяет:
- Снижение энергопотребления двигателя,.
- Контроль оборотов двигателя (плавный запуск и остановка, регулировка оборотов во время работы), и
- избегая перегрузки электродвигателя и тем самым продлевая срок его службы.
-
В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем: ; .
Трехфазный асинхронный двигатель с фазным ротором
Асинхронные двигатели — это асинхронные электродвигатели, в которых обмотки ротора соединены с контактным кольцом1.
До широкого применения преобразователей частоты асинхронные двигатели средней и большой мощности изготавливались с использованием фазовращателей. Трехфазные асинхронные двигатели (ADFM) обычно используются для тяжелых условий пуска. В качестве крановых двигателей переменного тока или для привода устройств, требующих бесфазного регулирования скорости.
Проектирование АДФР
Фаза ротора
Фазный ротор представляет собой, по сути, трехфазную обмотку (аналогичную обмотке статора), которая устанавливается в гнездо сердечника фазного ротора. Фазные концы этой обмотки ротора обычно соединены звездой, а пусковые концы соединены контактными кольцами, изолированными друг от друга и от вала. Трехфазный пусковой или регулирующий штекер обычно подключается к контактным щеткам. Асинхронные двигатели с фазным приводом имеют лучшие характеристики запуска и управления, но они сложнее, чем короткозамкнутые двигатели.
Statis ADFR.
Статор короткозамкнутого асинхронного двигателя идентичен статору короткозамкнутого асинхронного двигателя.
Определение выводов вспомогательной обмотки трехфазного АДСР
| Схема подключения обмоток, наименование фаз и выходов | Название розетки | |
|---|---|---|
| Inception | Конец. | |
| Разомкнутая цепь (6 проводников) | ||
| Фаза 1 | K1 | K2 |
| Фаза 2 | L1 | L2 |
| Фаза 3 | M1 | M2 |
| Соединение звездой (количество проводников 3 или 4) | ||
| Фаза 1 | K | |
| Фаза 2 | L | |
| Фаза 3 | M | |
| Starpoint (нулевая точка) | Q | |
| Дельта-соединение (3 воздуховода) | ||
| Первая зацепка | K | |
| Второй выход | L | |
| Третий ведущий | M | |
Определение выводов обмотки ротора ранее разработанных и модернизированных трехфазных машин по ГОСТ 26772-85
| Схема подключения обмоток, наименование фаз и выходов | Название розетки | |
|---|---|---|
| Соединение звездой (количество проводников 3 или 4) | ||
| Фаза 1 | Р1 | |
| Фаза 2 | Р2 | |
| Фаза 3 | Р3 | |
| ゼロポイント | 0 | |
| Соединение «треугольник» (количество проводников 3) | ||
| Первая зацепка | Р1 | |
| Второй выход | Р2 | |
| Третий ведущий | Р3 | |
В тех случаях, когда скорость двигателя не нужно регулировать во время работы, для снижения пускового тока используются плавные пускатели.
Конструкция
Асинхронный двигатель имеет статор и ротор, разделенные воздушным зазором. Активными частями являются обмотки и магнитопровод (сердечник); все остальные части носят конструктивный характер, обеспечивая необходимую прочность, жесткость, охлаждение, способность к вращению и т.д.
Обмотка статора представляет собой трехфазную (в общем случае — многофазную) обмотку, проводники которой равномерно распределены по периферии статора, а фазы размещены в пазах с угловым шагом 120 градусов Цельсия. Фазы обмотки статора соединены в стандартную конфигурацию треугольника или звезды и подключены к трехфазной сети. Магнитопровод статора перемагничивается в процессе изменения тока обмотки статора, поэтому он собирается из пластин электротехнической стали, чтобы обеспечить минимальные магнитные потери. Основным методом сборки магнитопроводов в стопку является группировка.
Существует два основных типа асинхронных машин: с короткозамкнутым ротором и с заблокированным фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются только конструкцией обмотки ротора. Катушка ротора изготавливается так же, как и катушка статора — из пластин электротехнической стали.
Короткое замыкание ротора

Короткозамкнутая обмотка ротора, которую часто называют «беличьей клеткой» из-за ее внешне похожей конструкции, состоит из медных или алюминиевых шин, которые на концах замкнуты двумя кольцами. Прутки этой обмотки вставляются в пазы сердечника ротора. Сердечники ротора и статора имеют зубчатую структуру. В двигателях малой и средней мощности обмотка обычно производится путем заливки расплавленного алюминиевого сплава в пазы сердечника ротора. Наряду со стержнями червячного сепаратора отлиты втулки короткого замыкания и концевые лопасти, вентилирующие двигатель. Для двигателей большей мощности перемычки изготавливаются из медных прутков, концы которых привариваются к кольцам перемычки.
Часто пазы ротора или статора имеют коническую форму, чтобы уменьшить высшие гармоники ЭЭД, вызванные пульсациями в магнитном потоке, вызванными зубцами, магнитное сопротивление которых намного меньше магнитного сопротивления обмотки, и уменьшить шум, вызванный магнитными причинами. Для улучшения пусковых характеристик асинхронного двигателя с короткозамкнутым сепаратором, т.е. для увеличения пускового момента и уменьшения пускового тока, в роторе используется специальная форма паза. В этом случае внешняя часть паза ротора имеет меньшее поперечное сечение, чем внутренняя часть. Это позволяет использовать эффект сдвига тока, который увеличивает активное сопротивление обмотки ротора при высоком скольжении (во время запуска).
Асинхронные короткозамкнутые двигатели имеют низкий пусковой момент и высокие пусковые токи, которые являются основными недостатками короткозамкнутых сепараторов. Поэтому они используются в электроприводах, не требующих высоких пусковых моментов. Их преимущества заключаются в том, что они просты в изготовлении и не вступают в электрический контакт со статичными частями машины. Это гарантирует длительный срок службы и низкие эксплуатационные расходы. Особая конструкция ротора, в котором в воздушном зазоре вращается только полый алюминиевый цилиндр, снижает инерцию двигателя.
Принцип действия
На обмотки статора подается переменное напряжение, под воздействием которого по ним протекает ток, создавая вращающееся магнитное поле. Магнитное поле воздействует на обмотки ротора и индуцирует АДР в соответствии с законами электромагнитной индукции. АДР вызывают токи в обмотках ротора. Ток в обмотке ротора создает собственное магнитное поле, которое взаимодействует с вращающимся магнитным полем статора. В результате к каждому штырю катушки ротора прикладывается сила, которая складывается в окружность, создавая электромагнитный момент, вращающий ротор.
При подаче трехфазного (обычно полифазного) тока в обмотку статора возникает вращающееся магнитное поле. Синхронная скорость Гц имеет следующие значения.
«width =» «» «height =» «» />.
где
В зависимости от количества пар полюсов, можно рассматривать следующие скорости вращения магнитного поля статора при частоте питающего напряжения 50 Гц
| n, об/мин | |
|---|---|
| 3000 | 1 |
| 1500 | 2 |
| 1000 | 3 |
| 300 | 10 |
Большинство электродвигателей имеют от 1 до 3 пар полюсов, частота которых составляет 4. В редких случаях используется больше такого количества пар шестов. Такие машины имеют более низкий КПД и коэффициент мощности, но вращение ротора двигателя очень плавное и медленное.
Режимы работы
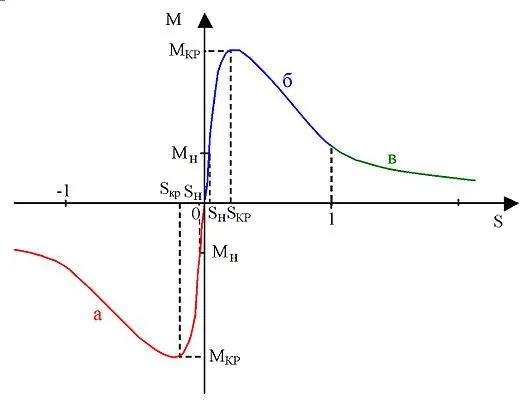
Механические характеристики асинхронных машин: a — функция рекуперации энергии (функция генератора); b — функция двигателя; c — функция остановки (функция электромагнитного тормоза).
Работа двигателя
Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой в обмотке ротора возникает ток. На проводники с током этой обмотки (а точнее, на зубцы сердечника ротора), действуют электромагнитные силы; их суммарное усилие образует электромагнитный вращающий момент, увлекающий ротор вслед за магнитным полем. Если этот момент достаточен для преодоления сил трения, ротор приходит во вращение, и его установившаяся частота вращения
Относительная разность скоростей магнитного поля и ротора называется скольжением.
» width=»» height=»» />。
Четко в режиме двигателя.
Работа генератора.
Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдёт в генераторный режим. При этом изменит направление и электромагнитный момент, который станет тормозным. В генераторном режиме работы скольжение
Асинхронные машины в режиме генератора требуют источника реактивной мощности для создания магнитного поля. При отсутствии начального магнитного поля в обмотках статора магнитный поток создается постоянными магнитами или, при наличии активного заряда, остаточной индукцией двигателя и конденсатора, подключенного параллельно фазам обмоток статора.
Асинхронные генераторы переменного тока потребляют ток холостого хода и требуют генератора реактивной мощности в виде современного двигателя, синхронного компенсатора и батареи статических конденсаторов (SBC). По этой причине, несмотря на простоту обслуживания, асинхронные генераторы используются относительно редко, в основном в качестве маломощных ветрогенераторов, небольших вспомогательных источников и тормозных устройств. С другой стороны, функция асинхронного двигателя-генератора используется очень часто. Этот режим используется для двигателей эскалаторов, спускающихся вниз. Подъемные двигатели работают в режиме генератора, в зависимости от соотношения веса кабины и противовеса.
Режим запуска и обслуживания
Работа асинхронных двигателей под нагрузкой происходит при отсутствии нагрузки на валу в виде редукторов и инструментов. Стоимость магнитных цепей, подшипников, магнитов вентилятора и потери мощности можно определить, работая без нагрузки. Фактическое состояние нулевой нагрузки s = 0.01-0.08. Идеальное состояние нулевой нагрузки n2= n1Поэтому s = 0 (на практике этот режим означает, что собственный принцип работы двигателя отстает от поля поля, чтобы позволить бегунку создать поле бегунка, даже если предположить, что трение подшипников не создает собственный момент нагрузки. Если S = 0, поле статора не проходит через круг бегуна и не может вызвать электричество, поэтому курсорное поле не создается.
Режим Электромагнитное торможение (противоположный ток).
Если направление вращения курсора или магнитного поля изменить так, чтобы он вращался в противоположном направлении, то HED обмотки бегунка и активная составляющая тока будут иметь то же направление, что и работа двигателя, и двигатель будет активен Питание от сети. Однако электромагнитный момент противоположен моменту нагрузки, т.е. тормозному моменту. Неравенства относятся к режимам работы.
Все эти изобретения позволили усовершенствовать электрические машины, привели к значительному использованию электрических машин в промышленности, значительно ускорили все технические процессы в производстве, повысили эффективность труда и снизили интенсивность труда.
РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
— Это разность скоростей вращающегося поля курсора и статора (2).
Скольжение выражается в виде доли одного или AS процентов. В последнем случае значение в (2) должно быть умножено на 100.
Очевидно, что увеличение момента нагрузки на валу асинхронного двигателя снижает скорость вращения курсора N2. В результате, скольжение асинхронного двигателя зависит от механической нагрузки на вал двигателя и находится в диапазоне 0< s ≤ 1
При работе асинхронного двигателя курсор изначально неподвижен (n2 = 0) под действием инерционных сил. Теперь скольжение S равно 1. В режиме работы двигателя без нагрузки (холостого хода), обороты курсора немного меньше последней скорости N1, а скольжение очень близко к нулю (s ≈ 0). Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением ñm. Для асинхронных двигателей общего назначения номинальное скольжение = 1-8%; для двигателей большой мощности номинальное скольжение = 1%; для двигателей малой мощности номинальное скольжение = 8%. Из уравнения (2), чтобы определить асинхронный тип скорости может произойти (оборотов в минуту):.
Пример 1.Трехфазный асинхронный двигатель с числом полюсов p = 4 работает в сети с частотой f1 = 50 Гц. Если скольжение составляет 6%, частота вращения двигателя определяется при номинальной нагрузке.
(Современная скорость согласно (1)
(Номинальная скорость согласно (3)
Работа генератора. Если подключена старая притирка и асинхронный бегунок вращается приводным двигателем (двигатель внутреннего сгорания, турбина и т.д.), который является источником механической энергии, направление вращения магнитного поля статора с частотой N2> N1, то курсор обгоняет поле статора и поэтому курсор вращается в обратную сторону (по сравнению с движением рассматриваемого двигателя).
Поле статора. Скольжение становится отрицательным, и направление ЭДС, наведенной в обмотке ротора, меняется. Электромагнитный момент ротора M также меняет свое направление. Это означает, что они направлены в противоположную сторону от вращающегося магнитного поля ротора М и тормозят относительно вращательного момента приводного двигателя М1 (рис. 9, а). В этом случае механическая мощность приводного двигателя преобразуется в основной части в электрическую эффективную мощность переменного тока P2. Особенностью работы асинхронного генератора является то, что вращающееся магнитное поле внутри него создается за счет реактивной мощности Q трехфазной сети, к которой подключен генератор и которая дает генерируемую активную мощность P2. Поэтому работа асинхронного генератора требует подключения источника переменного тока, к которому возбуждается генератор, т.е. внутри него возбуждается вращающееся магнитное поле. Скольжение асинхронной машины в режиме генератора может изменяться в диапазоне -∞< s < 0, т.е. оно может принимать любые отрицательные значения.
Преимущества и недостатки асинхронных машин с короткозамкнутым и фазным двигателем
Асинхронные машины с сепараторными роторами имеют как преимущества, так и недостатки. Недостатками этих машин являются большие пусковые токи, малый пусковой момент, низкий коэффициент мощности, сильная зависимость электромагнитного момента от напряжения питающей сети и отсутствие возможности регулирования скорости в случае подключения. Коммуникационные сети. Указанные недостатки могут быть преодолены путем использования статических преобразователей частоты в качестве источников питания.
Преобразователи частоты — это электронные устройства, используемые для изменения частоты напряжения и тока.
Преимущества индукционных машин с сепаратором заключаются в том, что они просты в изготовлении, стоят относительно недорого, имеют относительно низкие эксплуатационные расходы, надежны и могут быть включены в сеть без преобразователей. Все эти преимущества являются результатом того, что в этих машинах нет механического коммутатора в цепи ротора, и поэтому они используются в качестве электродвигателей на заводах.
Основными преимуществами асинхронных машин с фазнозамкнутыми роторами перед клетьевыми машинами являются возможность перегрузки, большой начальный момент, постоянная скорость при перегрузке и возможность использования автоматических пусковых устройств. Эти машины используются, когда необходимо увеличить пусковой момент, уменьшить пусковой ток и управлять скоростью с некоторыми ограничениями.
Принцип действия и конструкция
Определение 1 Асинхронные машины — это электродвигатели переменного тока, у которых частота вращения ротора (в режиме двигателя) не равна частоте вращения магнитного поля, создаваемого током обмотки статора.
Асинхронные машины имеют бегунок и статор, разделенные воздушным зазором. Активной частью асинхронной машины является ядро (магнитопровод) и провода, а все остальные части, обеспечивающие вращение, охлаждение, жесткость и прочность, являются конструктивными элементами. Более старой обмоткой является полифазная обмотка, где трубы равномерно распределены по периферии статора, а фазы установлены в прорези. Старые обмотки могут быть соединены по схеме треугольника или звезды. Старые сердечники собираются с плитами из электротехнической стали, чтобы минимизировать магнитные потери, так как они репетируют в процессе изменения тока статора. Асинхронные двигатели делятся на два основных типа в зависимости от конструкции курсора.
Аналогичные тематические задания были выполнены
- Мастерская асинхронной фрикционной машины 450.
- Краткое содержание документа Асинхронная машина 260 Руб.
- Проверьте этот документ асинхронная машина 210 руб.
Получите готовый проект или поговорите со специалистом для образовательного проекта, чтобы узнать больше о стоимости
- Асинхронные двигатели с короткими рециркуляционными сепараторами. Эти машины имеют низкий пусковой момент и значительный пусковой ток, что является недостатком, и поэтому используются на электростанциях, где не требуется высокий пусковой момент.
- Асинхронные двигатели с фазовыми бегунками. Эти машины обеспечивают плавное регулирование мощности в широком диапазоне. В цепь обмотки бегунка встроена внешняя схема управления. Эти цепи включают в себя источники постоянного напряжения, реакторы, раннеры и источники питания.
На принципиальной схеме изображен асинхронный двигатель с фазным и короткозамкнутым бегунками в следующей схеме
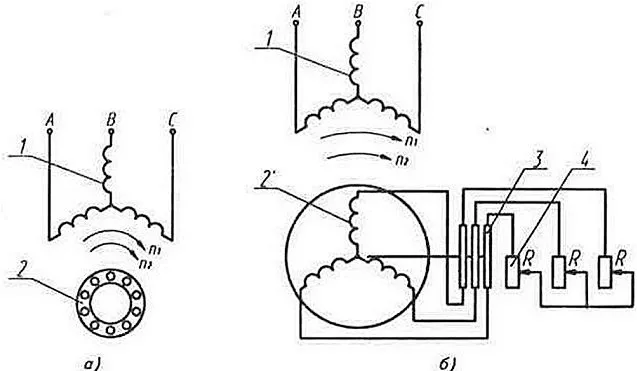
Рисунок 1: Схематическая диаграмма асинхронной машины. Автор 24 — Электронный обмен студенческими документами
Нужны ли вам советы преподавателя по этой теме? Задайте вопрос своему учителю и получите ответ через 15 минут! Задавайте вопросы по.
a) Асинхронный двигатель с короткозамкнутым клировым бегунком — b) Асинхронная машина с фашистским бегунком — 1 — обмотка стата — 2 — клетка короткого замыкания, фашистский курсорный столб — 3 — контактное кольцо — 4 — цепь резистора против фашиста.
Для повышения эффективности и уменьшения износа щеток некоторые АДСР включают специальную схему (механизм короткого замыкания). Это поднимает щетки и замыкает кольцо после запуска.
Асинхронный генератор.Генератор из асинхронного двигателя.
Общие характеристики генераторов в асинхронном режиме.
Асинхронные генераторы (АГ) являются наиболее распространенными двигателями переменного тока и используются в основном в качестве двигателей. Только низковольтные генераторы номинальной мощностью от 0,12 до 400 кВт (напряжение питания до 500 В) потребляют более 40% электроэнергии в мире, ежегодно производят сотни миллионов долларов и обслуживают различные потребности в промышленности, сельском хозяйстве и судоходстве. авиация, транспорт, автоматизация, военное и специальное оборудование. Воздушный зазор между ротором и статором составляет от 0,4-0,6 мм на малых машинах и до 1,5 мм на больших машинах. Монтажные пластины двигателя 4 и 16 поддерживают подшипники ротора. Асинхронные двигатели охлаждаются по принципу самовентиляции вентиляторами 5. Подшипники 2 и 3 снаружи закрыты крышкой 1 с лабиринтным уплотнением. Коробка выводов обмотки статора 21 установлена в корпусе статора вместе с выводами обмотки статора 20. К корпусу прикреплена табличка типа 17, на которой перечислены основные компоненты ПСР. На рисунке 5.1 также показаны: 6 — посадочный слот — 7 — корпус — 8 — корпус — 18 — ножка — 19 — вентиляционный канал.
Асинхронная работа генератора
Мне понравилось:.
Например.
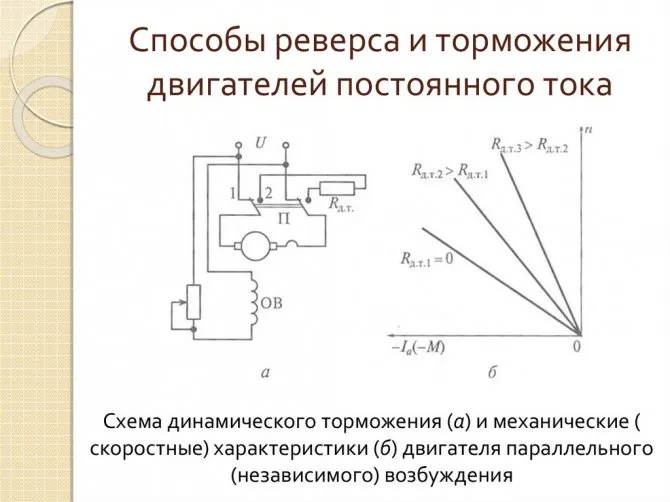
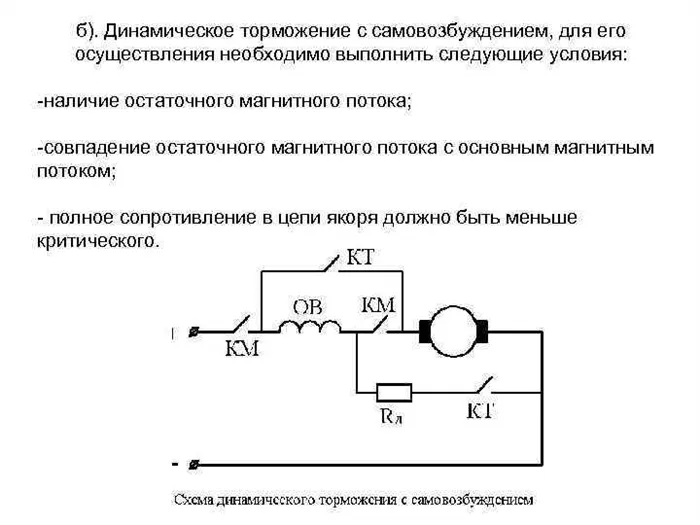


Динамическое торможение.
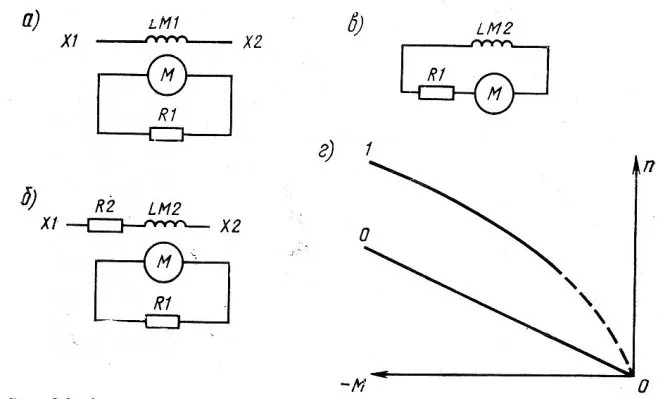
Необходимость в таком торможении возникает, когда двигатель отключен от электросети, а его якорь продолжает вращаться под действием кинетической энергии движущейся массы. Если обмотка якоря отключена от сети и подключена к резистору gt, двигатель переключается в режим генератора (обмотка возбуждения должна оставаться подключенной к сети). Вырабатываемая энергия не возвращается в сеть, как в случае рекуперативного торможения, а преобразуется в тепло и выделяется в резисторе.
Во время динамического торможения ADR якоря не изменяет направление, но поскольку якорь отключен от сети (U = 0), ток якоря изменяет направление, создавая ADREa.
Другими словами, она становится отрицательной. Результирующий электромагнитный момент также меняет направление и становится тормозящим (рис. 13.15, б). Процесс торможения продолжается до полной остановки постановки на охрану (n = 0).
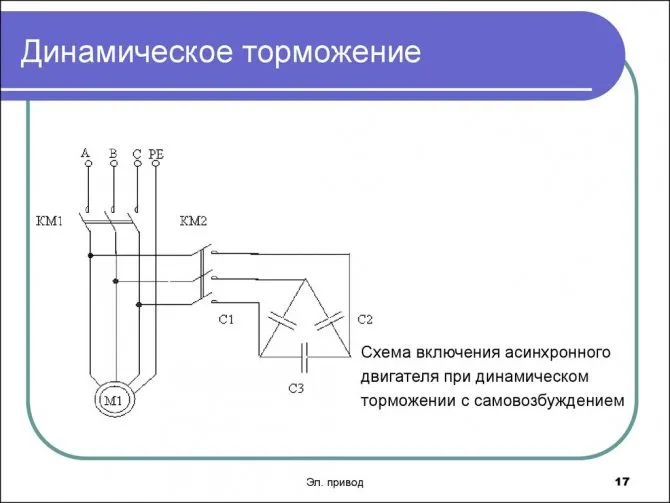
Схемы конденсаторного торможения электродвигателей
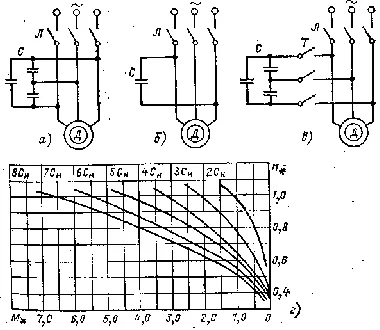
Торможение асинхронного двигателя с помощью конденсатора
На этом рисунке показана схема подключения двигателя с конденсаторным тормозом. Конденсатор подключается параллельно обмотке статора, обычно в треугольном соединении.
Когда двигатель отключается от сети, разрядный ток в конденсаторе создает магнитное поле, которое заставляет его вращаться с малой угловой скоростью. Двигатель переходит в режим торможения генератора, и частота вращения снижается до значения, соответствующего скорости возбужденного поля. Когда конденсатор разряжен, возникает высокий тормозной момент, который уменьшается по мере снижения скорости.
В начале торможения накопленная кинетическая энергия ротора быстро поглощается в течение короткого тормозного пути. Торможение резкое, а момент удара достигает 7 Мном. Значение пикового тока торможения при наибольших значениях емкости не превышает пусковой ток.
По мере увеличения емкости конденсатора тормозной момент увеличивается, и торможение продолжается до более низких скоростей. Согласно исследованиям, оптимальное значение емкости составляет от 4 до 6 Кном. Торможение конденсатора заканчивается на 30-40% от номинальной скорости, когда скорость ротора равна скорости поля статора от свободного тока в статоре. В процессе торможения поглощается более 3/4 кинетической энергии, накопленной в приводном механизме.
Двигателю на рис. 1a для полной остановки требуется момент сопротивления на валу. Преимуществами описанной схемы являются отсутствие коммутационных устройств, простота обслуживания, высокая надежность и экономичность.
Если конденсатор подключен параллельно с двигателем, можно использовать только конденсаторы, подходящие для работы на постоянном токе.
Если двигатель отключить от сети, а затем подключить и затормозить конденсатор в соответствии со схемой на рис. 1, то можно использовать более дешевые и более компактные листовые конденсаторы MBGP и MBGO для работы в прямом и импульсном режимах. Полярные электролитические конденсаторы (KE, KEG и т.д.).
Конденсаторные тормоза с конденсаторами, подключенными по схеме «треугольник», подходят для быстрого и точного отключения электродвигателей, у которых момент нагрузки на валу составляет не менее 25% от номинального момента двигателя.