Рассмотрите схему с точки зрения нагрева транзистора. Это один из основных критериев, по которым устройства выходят из строя. Полевой транзистор состоит из двух элементов: самого транзистора и паразитного диода. В схемах управления двигателем работают оба элемента. Полевой транзистор нагревается, когда
Управление двигателем постоянного тока
Приводы постоянного тока используются для управления двигателями постоянного тока. Однако не везде, а только тогда, когда требуется плавное и точное управление скоростью и крутящим моментом электродвигателя в достаточном диапазоне.
Где могут использоваться приводы постоянного тока? Чтобы ответить на этот вопрос, необходимо сначала сказать несколько слов о принципе работы двигателей постоянного тока.
В целом, следует отметить, что электродвигатели являются очень распространенными объектами управления в различных устройствах и технических системах. И без них вся наша современная жизнь, очевидно, была бы не такой современной. Точнее, мы бы не вышли за рамки технологий начала XIX века. И мы бы не знали не только компьютеров с их гаджетами, но и, например, даже обычного для США электрического света, даже электрогенератора — который, по сути, является тем же электродвигателем, но преобразующим различные вещи неэлектрической энергии (механической, химической, или тепла).
Сам электродвигатель, как известно, делится на электродвигатель переменного тока постоянного тока и электродвигатель электродвигателя. И сегодня последний становится все более популярным в промышленности благодаря стремительному развитию научно-технической мысли, которая предлагает более совершенные алгоритмы векторного управления и значительно более дешевые и простые в эксплуатации преобразователи частоты.
Однако следует отметить, что DC Motors еще рано амортизировать. У них есть свои очень важные и значительные преимущества. Действительно, одним из «глобальных» недостатков двигателей постоянного тока является слабая механическая прочность коллектора, его низкая механическая прочность и щеток.
Однако в двигателях постоянного тока относительное постоянство крутящего момента на валу позволяет изменять скорость в достаточном диапазоне. В то же время скорость двигателя постоянного тока пропорциональна величине напряжения, приложенного к обмотке якоря. Это означает, что в диапазоне скоростей, от нулевой до номинальной, электродвигатель может развивать полный крутящий момент. Именно поэтому двигатели постоянного тока широко используются в приложениях, где требуется высокий крутящий момент при низкой скорости вращения двигателя. К таким областям относятся электроприводы для лифтов, кранов, ленточных конвейеров, смесителей и экструдеров.
Принципы работы двигателей постоянного тока
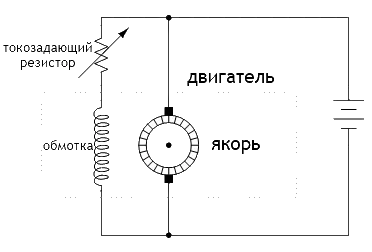
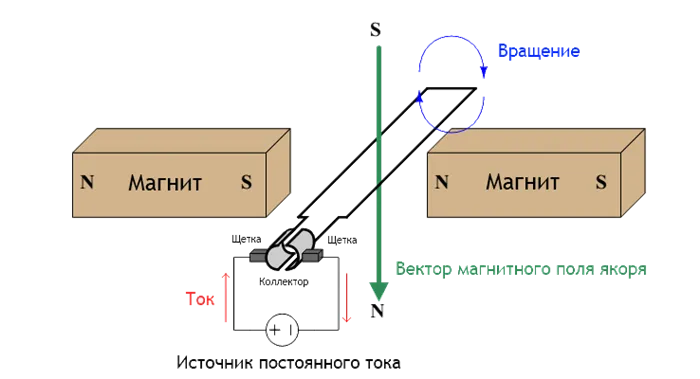
Следует отметить, что, вообще говоря, самые первые из вращающихся электрических машин, изобретенных в XIX веке, были электронными устройствами постоянного тока. Принцип его действия известен с середины прошлого века и основан на том, что вращающий момент здесь создается за счет взаимодействия двух магнитных полей — поля возбуждающей обмотки и поля, создаваемого вращающейся обмоткой якоря.
Однако некоторые модели двигателей постоянного тока не имеют обмотки возбуждения и вместо нее оснащены постоянными магнитами, которые поддерживают статическое магнитное поле при любых условиях эксплуатации.
Управление двигателем постоянного тока
Последнее означает, что взаимосвязь между скоростью и крутящим моментом может быть изменена путем изменения тока в обмотке. Однако этого недостаточно для управления общей выходной мощностью двигателя. Чтобы управлять выходной мощностью двигателя постоянного тока, необходимо также управлять напряжением и током якоря. Для этого можно использовать переменные резисторы, но в настоящее время этот метод не используется, так как приводит к потерям мощности. Лучшим решением является использование электронных схем управления мощностью на основе транзисторных переключателей, которые быстро включают и выключают якорь двигателя. Этот тип управления называется широтно-импульсной модуляцией или ШИМ.
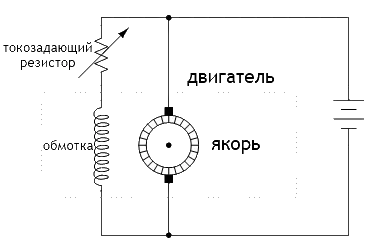
Рисунок 2.Управление скоростью и крутящим моментом электродвигателя
Традиционная технология для импульсных источников питания двигателей постоянного тока использует схему управляемого выпрямителя. Схемы управляемых выпрямителей используют тиристоры вместо обычных выпрямительных диодов для преобразования переменного тока в постоянный (управляемая схема Ларионова). Основным источником питания для промышленных двигателей постоянного тока остается переменный ток, который должен быть преобразован в постоянный в некоторых узлах системы. Имеет смысл интегрировать управление непосредственно в этот узел выпрямителя.
Рисунок 3. Принципиальная схема управляемого выпрямителя
Схема управляемого выпрямителя работает по принципу изменения времени «пускового» импульса относительно колебательного импульса переменного тока. Чем раньше в каждом периоде переменного тока открывается тиристор, тем дольше ток может протекать через двигатель. Схема управления фазой отвечает за генерацию импульса и его длительность.
Поэтому приводы постоянного тока, которые просто регулируют мощность, подаваемую на двигатель, трудно настраивать и они не применимы для большинства приложений. Для управления двигателем необходимо регулирование скорости. Поэтому двигатели постоянного тока оснащены тахогенератором, механически соединенным с валом двигателя.
Тахогенератор — это небольшой генератор, который вырабатывает постоянное напряжение, прямо пропорциональное скорости вращения вала, обычно на выходе 0-10 В постоянного тока, редко 0-220 В переменного тока. На основании полученных показаний регулируемый привод постоянного тока регулирует мощность, подаваемую на двигатель, таким образом, чтобы скорость вращения соответствовала скорости, заданной управляющим сигналом. Привод постоянного тока оснащен датчиком обратной связи для регулирования скорости, что позволяет точно регулировать скорость двигателя.

Рис. 4. Схема управления двигателем постоянного тока
Нужно ли менять привод постоянного тока?
Следует отметить, что широкое применение двигателей непрерывной мощности существует уже давно, и поэтому двигатели непрерывной мощности уже давно используются для управления скоростью вращения двигателей. Поэтому эти двигатели широко распространены и устанавливаются в самых разных машинах, механизмах и оборудовании. Но здесь кроется проблема — дело в том, что электростанции непрерывного действия производились с аналоговыми микросхемами управления. Это привело к увеличению времени установки, постоянному обслуживанию агрегатов и частым переделкам. В результате против двигателей непрерывного потока и электростанций непрерывного действия сложилось предубеждение, что эти системы не нужны или даже вредны. На смену «двигателям постоянного тока» приходят «двигатели переменного тока» с более широким напряжением. И в некоторых местах это действительно было оправдано, но …
К сожалению, но часто «дьявол кроется в деталях»!
Следует отметить, что в настоящее время доступны двигатели непрерывной мощности с современными микропроцессорными схемами управления фазами. Это означает, что они гораздо надежнее и, что самое главное, не требуют постоянного обслуживания двигателя и частых перезагрузок. Кроме того, вопреки сообщениям СМИ и обсуждениям производителей установок переменного тока, вам, вероятно, следует рассмотреть возможность питания непрерывных установок при модернизации оборудования, так как все еще существует множество приложений, где непрерывные установки предпочтительнее (и в конечном итоге стоимость), чем функциональность.
Кроме того, при модернизации системы управления простая замена устаревшей электростанции непрерывного действия на новую современную потоковую установку очень часто оказывается более эффективной с точки зрения затрат.
Подумайте об этом! Это ваш случай? В этом случае целесообразно рассматривать лидеров в непрерывных текущих двигателях. Одним из них является компания Siemens, которая предлагает серию Sinamics DCM. Работа (например, изогнутые линии взгляда).
Крайние выводы резистора подключены к конденсатору через диод. Само устройство (конденсатор) подключено к земле через второй кабель. Такое расположение диодов обеспечивает зарядку конденсатора через первую и сток второй части переменного резистора переключения.
Управление двигателем при помощи биполярного транзистора
Простейший способ приведения двигателя в действие показан ниже.
В качестве переключателя используется биполярный транзистор. Необходимо выбрать резистор R. Это гарантирует, что в худшем случае (потенциал базы равен потенциалу эмиссии) ток через него не превысит максимальный ток в шлюзе микроконтроллера.
Чтобы выбрать подходящий транзистор, необходимо знать максимальный ток при запуске или остановке двигателя. Исходя из этого, выберите транзистор с соответствующим током коллектора и его максимальным значением.
Следует также обратить внимание на мощность, выделяемую в транзисторе (p = uce * ic). Хотя транзистор в этом случае работает в насыщении и напряжение UCE часто меньше 1 В, ток коллектора все еще высок (около 0,5 А для двигателя среднего размера), и поэтому мощность, выделяемая транзистором, может быть навязана нам. Установите теплоотвод.
Другая проблема биполярных транзисторов заключается в том, что ток базы очень высок. Отношение выходного тока к входному току таких транзисторов обычно равно 100 (причина этого называется коэффициентом усиления мощности, обозначаемым HFE). Однако, к сожалению, эта причина значительно уменьшается, когда транзистор работает на полную мощность.
Это приводит к тому, что при высокой цене на мощность коллектора может потребоваться более 20 мА. Это означает, что нагрузочная способность шлюза превышена. В таких случаях решением может стать использование комбинации транзисторов — транзисторов Дарлингтона.
Такая система ведет себя как один транзистор с высоким усилением тока и низкой рабочей скоростью.
Несколько слов об индуктивных нагрузках
Следует отметить, что двигатель является индуктивной нагрузкой. Когда ток протекает через обмотки и это течение резко прекращается, на проводах обмотки временно появляется большое напряжение. Это напряжение может привести к повреждению транзистора (на схеме выше), вызвав соединение база-коллектор. Это также может вызвать значительные помехи. Чтобы избежать этого, необходимо подключить один диод рядом с индуктивной нагрузкой.
При нормальной работе двигателя диод направлен в противоположную сторону. Когда питание двигателя отключается, напряжение на катушке увеличивается, и диод перемещается вперед, разряжая избыточную энергию, накопленную в катушке.
Диод должен быть рассчитан на то, чтобы выдерживать обратное напряжение при нормальной работе двигателя. Эта защита доступна как для биполярных транзисторов, так и для МОП-транзисторов. Также рекомендуется использовать проход в рабочем режиме с электромагнитным реле для предотвращения преждевременного выхода из строя.
Управление двигателем при помощи MOSFET транзистора
МОП-транзисторы также могут использоваться для привода двигателей непрерывного действия.
Они должны относиться к типу обильных каналов. Главное преимущество таких транзисторов в том, что они требуют очень малого входного тока. Из-за небольшого сопротивления активного канала (доли ома) рассеиваемая мощность транзистора невелика. Недостатком является чувствительность к электростатическому разряду, который может разрушить транзистор.
Поскольку поток стока может достигать десятков ампер (для среднего транзистора), а входной ток практически равен нулю, MOSFET-транзисторы являются очень мощными и во многих случаях заменяют биполярные транзисторы. Они также должны быть защищены диодами от индуктивных перенапряжений. Это связано с тем, что это может привести к пробою между затвором и каналом (напряжение пробоя составляет несколько десятков вольт).
Управление двигателем при помощи реле
Если вы проверили двигатель непрерывной мощности и знаете, что частота коммутации не слишком высока (менее 20 Гц), вы можете использовать реле (реле не подходят для ШИМ-управления). Преимуществом этого решения является, прежде всего, низкое производство тепла.
Существуют небольшие реле, которые могут управлять токами до 10a! При таких высоких токах потеря электронной мощности приемлема, но хуже при низких токах. Контактные катушки реле могут работать при токе в несколько сотен мА. Поэтому нет причин использовать такие реле для управления токами такой величины. К счастью, есть отдельные случаи, которые потребляют около 40 мА, что уже гораздо лучше.
Что касается напряжения управления реле, то диапазон составляет от 3 до 24 В. Как я переписал, максимальный выходной ток микроконтроллера составляет 20 мА, что слишком мало для прямого управления реле. Поэтому для управления им необходимо использовать транзистор. Схема подключения для такого соединения обычно выглядит следующим образом
Поэтому необходим транзистор. Обратите внимание, что в данном случае в этой системе выделяется гораздо меньше тепла, чем в транзисторе в цепи, потому что транзисторный ключ течет от небольшого тока, а само реле с трудом рассеивается в выходной цепи.
Диоды релейной защиты не являются обязательными. Их наличие зависит от интенсивности мощности, самовоспроизведения катушки и максимального напряжения транзистора. Однако наличие диода в выходной цепи зависит от того, хотите ли вы продлить срок службы контактов реле.
В конце обсуждения E-Rays приводятся условия, при которых этот тип управления двигателем лучше всего подходит. Предположим, что двигатель управляется при номинальном рабочем напряжении 2,5 В и токе 3 А и работает от источника 2,5 В (низкочастотная передача). При использовании усилителя на транзисторах на выходе возникает падение напряжения около 1 В, что в данном случае очень дорого. Если используется реле, то падение напряжения отсутствует.
В электронных системах этот метод управления двигателем называется широтно-импульсным (ШИМ). Эта процедура характеризуется изменением приложенного напряжения или длительности формы волны.
Управление двигателем постоянного тока с использованием Н-моста
Если рассматривать принцип работы, то мост — это рациональная схема, состоящая из четырех логических элементов (реле или полупроводников), которые могут быть переведены в две ситуации (открыто и закрыто). В данном примере мы видим полупроводниковый мост. Просто изменяя условия этих элементов для каждой пары, двигатель вращается в одном направлении без изменения контактов.
Свое название устройство получило благодаря внешнему сходству каждой пары транзисторов с буквой «H» в вертикальном элементе буквы и горизонтально непосредственно управляемым двигателем. Пример базового моста из четырех транзисторов показан на схеме ниже. Попарно открывая и закрывая нужные элементы схемы, можно пропускать витки в противоположных направлениях.
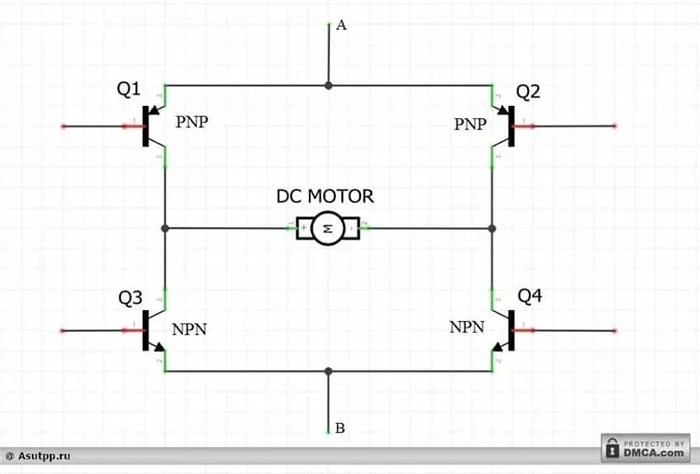
Н-мостовая схема
На схеме видно, что в этой цепи мощность двигателя регулируется клеммами A и B и может быть управляемой.
Принцип, определяющий направление вращения в мосту, следующий
- Когда на базу транзисторов Q1 и Q4 подается импульс для открытия соединения, ток протекает через обмотки двигателя в одном направлении.
- Если подать импульс на базу транзисторов Q2 и Q3, чтобы открыть переход, ток потечет в направлении, противоположном предыдущему, что приведет к обратному движению.
- Попарное открытие транзисторов Q1 и Q3 или Q2 и Q4 приводит к торможению ротора.
- Открывать последовательно транзисторы Q1 и Q2 или Q3 и Q4 совершенно недопустимо, так как произойдет короткое замыкание.
Используя H-мостовую схему для управления работой двигателя постоянного тока, все функции электродвигателя можно выполнять без переподключения клемм. Поскольку выбор транзисторов и их подключение в схеме H-моста сложны, гораздо проще использовать существующие драйверы с такой функциональностью. Из них наиболее популярны драйверы L293D и L298N.
Сравнивая эти два драйвера, обратите внимание, что L298N превосходит L293D как по производительности, так и по доступным опциям. Хотя L293D является наименее дорогой моделью, L298N используется гораздо чаще благодаря своим значительным преимуществам. Поэтому в данном примере мы рассмотрим принцип управления двигателем с помощью драйвера L298N и платы Arduino.
Что представляет собой драйвер L298N?
Плата содержит микросхему и 15 выходов для генерации управляющих сигналов. Он предназначен для подачи сигналов на индуктивные рабочие элементы (обмотки двигателя, катушки реле и т.д.). L298N может использоваться для подключения до двух таких компонентов в рабочем режиме. Например, через L298N можно одновременно управлять двумя шаговыми двигателями.
На следующей схеме показан пример того, как вывод L298N может быть выделен из функциональной микросхемы.
- Vss — выход питания логической схемы 5 В.
- GND — это нулевая клемма (или корпус) и
- INPUT1, INPUT 2, INPUT 3, INPUT4 — скорость двигателя может быть увеличена или уменьшена.
- OUTPUT1, OUTPUT2 — выходы для питания первой индуктивной нагрузки, и
- OUTPUT3, OUTPUT4 — выходы для питания второй индуктивной нагрузки, и
- Vs — выходы для импульсного источника питания,.
- ENABLE A, B — выходы для управления отдельным каналом — можно установить активный и пассивный режим (с регулировкой скорости и заданной скоростью)
- CURRENT SENSING A, B — контакты для настройки режима тока.
Принцип управления двигателем при помощи Arduino и драйвера L298N
Руководство L298N включает в себя мост, поэтому плата может управлять двумя электродвигателями одновременно с помощью двух наборов контактов. Логическая схема устройства работает при напряжении 5 В, в то время как сами электродвигатели могут питаться напряжением до 45 В. Максимально допустимый ток для одной из плат составляет 2 А.
Как правило, такие драйверы разрабатываются по модульному принципу, поэтому в состав устройства уже входят компоненты, выходы и разъемы, необходимые для передачи сигналов управления. Пример такого драйвера показан на следующей схеме.
Теперь давайте рассмотрим, как можно использовать драйвер L298N для управления двигателем. Двигатель подключается к винтовым клеммам — по одной паре на двигатель. Остальные клеммы предназначены для подключения положительного и отрицательного источника питания и источника падения напряжения (напряжение питания подается на определенном уровне, при котором работает двигатель, а внутренний преобразователь снижает его до 5 В для собственной логической схемы). Штекерные клеммы на плате модулируют амплитуду импульса при формировании рабочего сигнала.
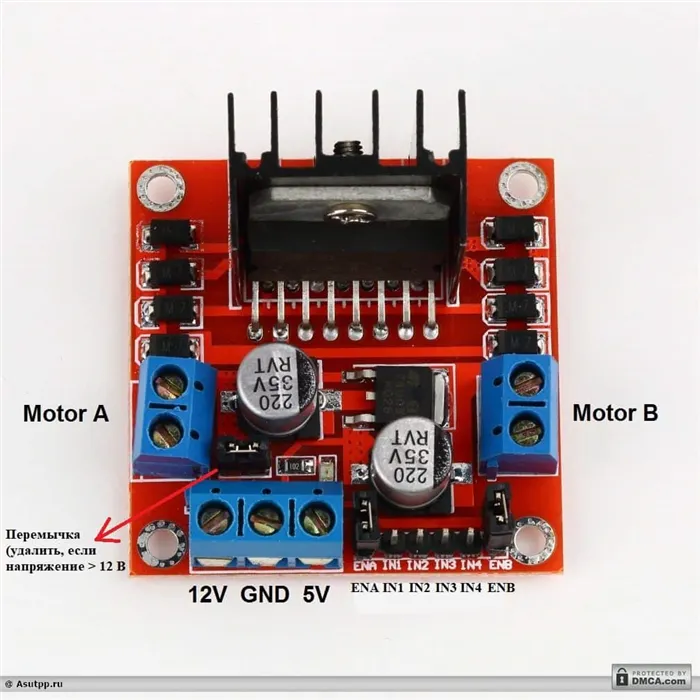
Клеммы для подключения двигателя
Обратите внимание, что трехногий зажим, как показано на рисунке выше, не только обеспечивает напряжение питания платы, но и может быть преобразован в 5 В для нужд драйвера. Этот выход можно использовать для питания той же Arduino или другого устройства, оснащенного 5 В.
Важным моментом получения 5 В от этой клеммы является установка черного замыкателя, который отвечает за преобразование любого уровня напряжения, отличного от 5 В, пока оно ниже 12 В. Если напряжение питания выше 12 В, необходимо устранить короткое замыкание, так как внутренний преобразователь не рассчитан, а сама плата должна питаться напряжением 5 В через третью клемму на той же планке.
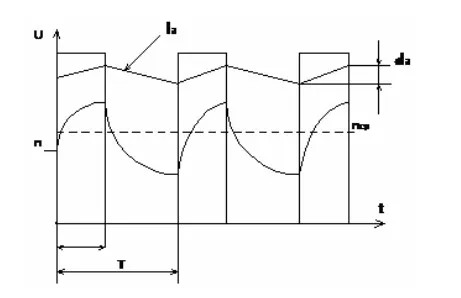
Однако, если этап меньше, чем полный период запуска, индикатор скорости n не может предотвратить установку в конце каждого периода номинального значения n (при запуске) или n = 0 в случае плавного прерывания. В таких случаях устанавливается специальный показатель NCP, размер которого напрямую определяется начальным периодом.
Другие схемы и методы
Электрики также используют более модернизированные методы и технологии для регулирования цены электродвигателей постоянного тока. Некоторые из них кратко рассмотрены ниже.
Контроллер Redostat-Contatik
Контроль Родос-Коннект реализуется в одной из трех систем.
- Проверка скорости n от 0 до N номинальной обеспечивает разновидность контроля усиления, так как Родос-Контроль подключен к цепи усиления.
- Если она должна быть больше N номинальной, в схему добавляется розмарин и реализуется управление полюсами.
- Для реализации причин n n n nom и n˃n nom к контуру RH и контуру усиления прикрепляются ставки.
Обратите внимание, что все эти схемы можно использовать в ручном режиме. Автоматический вариант требует использования переключателей R PA R PB через контакты (эту роль могут выполнять электронные или простые электрические переключатели).
Для обеспечения более плавного и точного регулирования скорости можно установить дополнительные переключающие резисторы и другие переключающие компоненты. Этот вариант приводит к увеличению габаритов, повышению стоимости и, к сожалению, снижает общую производительность.
Система G-D.
Управление двигателями 220 В с помощью этой системы достигается с помощью схемы RB с UV, изменяющимся от 0 до N номинального. Для того чтобы выходная скорость двигателя превысила номинальную, необходимо изменить RVD. Это можно легко сделать, уменьшив ток двигателя. Это уменьшает сетевой поток (F) и последующее увеличение скорости.
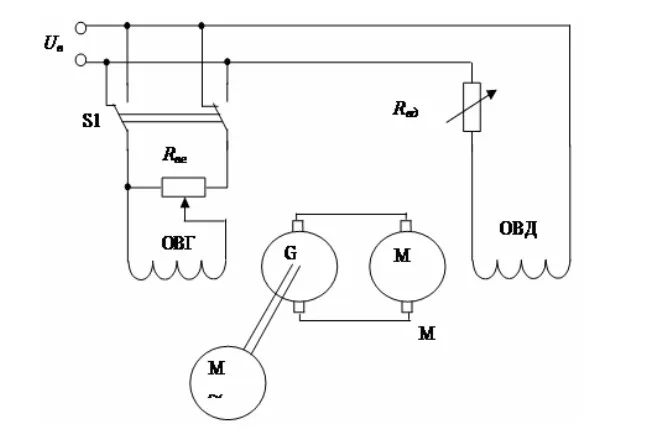
Выключатель (S1) отвечает за изменение направления вращения ротора. Он управляется путем регулировки относительно небольших токов стимуляции D и G, что позволяет легко адаптироваться к задаче.
В целом, этот контроллер очень полезен для точного управления, но в то же время имеет несколько недостатков
- Большой размер и вес.
- Низкая производительность.
- Потери энергии на каждом этапе (механические в электрические и наоборот) из-за тройного преобразования энергии.

Импульсный контроль.
Основа этого метода заключается в том, что на двигатель подаются импульсы напряжения от выключателя. Выключатель должен быть специально сконфигурирован в зависимости от управляющего напряжения. На этом основан метод, например, ШИМ или VIM, о котором более подробно будет рассказано позже.
На скорость вращения ротора влияет не изменение тока управления, а изменение времени подачи номинального напряжения на двигатель. Для нормальной работы двигателя необходимо постоянно менять периоды ускорения и замедления.
ШИМ технология
Импульсный метод лежит в основе многих методов регулирования напряжения для электродвигателей постоянного тока, в частности, метода Н-моста. Затем эта методология применяется к ArduinoUno. Амплитудная модуляция импульсов. Его суть заключается в том, что напряжение питания подается в виде импульсов. При этом частота импульсов поддерживается постоянной, а длительность может быть изменена.
Сигнал здесь относится к уровню заполнения. Это значение противоположно рабочему циклу, т.е. отношению периода импульсов к их длительности. Формула выглядит следующим образом.
Если клавиша нажата в положении ‘ON’, двигатель начинает вращаться и продолжает работать до тех пор, пока клавиша не исчезнет. Это происходит, если клавиша всегда удерживается в положении «нажато». Однако, если переключатель активирован только на 8 мс из общего времени цикла 10 мс, блок питания не получит полное напряжение 9 В от батареи. В этом случае уровень среднеквадратичного напряжения, получаемого двигателем, не будет превышать 7 вольт. Как мы уже видели, в этом случае двигатель будет работать медленнее, чем при постоянно нажатой кнопке.

Таким образом, коэффициент кривой ШИМ или рабочий цикл равен 80%. Расчет производится путем деления времени включения на сумму времени работы и времени выключения.
Производственные системы.
В целом, существует несколько эффективных систем для получения этого ШИМ-импульса. Одной из самых простых является схема, включающая специальный таймер. Для реализации требуется минимум компонентов и не требуется никаких настроек. Время выполнения не превышает одного часа.
Диапазон напряжения питания VCC схемы составляет 5-16 вольт. В качестве VD1-3 можно использовать практически любой тип диода. Сам таймер включает в себя шунт, компаратор (два), триггер, открытый коллектор (ключ) и выходной регулятор.
Клеммы питания (VCC) и возврата могут работать под напряжением «+», например, +5 В. Заземление является «отрицательным». Коллектор транзистора открыт (на клеммах) и подключен к источнику питания через резистор, затем с него снимается сигнал ШИМ.
Крайние выводы резистора подключены к конденсатору через диод. Само устройство (конденсатор) подключено к земле через второй кабель. Такое расположение диодов обеспечивает зарядку конденсатора через первую и сток второй части переменного резистора переключения.
Модельный ряд регуляторов
Рассмотрим несколько примеров устройств, использующих различные методы управления двигателями постоянного тока.
ШИМ 3A 80W
Устройства выпускаются в различных вариантах с напряжением от 12 до 28 В. Устройства являются регулируемыми и реверсивными, а конструкция включает в себя потенциометр с функцией переключателя. Длина кабеля переключателя составляет 15 см, а диапазон входной мощности — 6-28 В постоянного тока. В комплект поставки входит переключатель реверсивного привода.
ШИМ управление скоростью двигателя Управление скоростью MACH3.
Данная модель представляет собой регулятор тока с диапазоном мощности 12-110 В. Также доступна более мощная версия, рассчитанная на работу с сетями 300 вольт. Номинальный ток регулируемого двигателя не должен превышать 5 ампер. Они отличаются быстрым временем отклика и компактным дизайном.

ШИМ-управление двигателем вызывает большие проблемы при обнаружении плат, так как напряжение очень быстро меняется от 0 до максимума. Давайте кратко перечислим правила, которые необходимо соблюдать при обнаружении лодки.
ШИМ сигнал в H-мосте
Для изменения направления вращения и скорости необходима схема Н-моста, а для регулирования скорости транзисторы должны управляться ШИМ-сигналом. В схеме Н-моста четыре транзистора. Каков наилучший способ их контроля? К какому транзистору должен быть подключен сигнал ШИМ? Давайте рассмотрим этот вопрос (рекомендуем прочитать очень подробную статью об этом).
Рассмотрите схему с точки зрения нагрева транзистора. Это один из основных критериев, по которым устройства выходят из строя. Полевой транзистор состоит из двух элементов: самого транзистора и паразитного диода. В схемах управления двигателем работают оба элемента. Полевой транзистор нагревается, когда
Когда транзистор открыт, нагрев происходит за счет сопротивления открытого транзистора Rdson, и в зависимости от времени, в течение которого транзистор открыт, выделяется мощность P = I * I*Rdson.
Когда транзистор выключен, нагрев происходит за счет прямого диода P = I * U (обычно 1 В), так как ток HED двигателя проходит через диод.
Когда транзистор переходит из открытого в закрытое состояние, нагрев пропорционален времени открытия/закрытия транзистора
Давайте рассмотрим, как схема управления влияет на нагрев электронного выключателя. Предположим, что двигатель управляется ШИМ-сигналом с рабочим циклом 50%, и двигатель вращается в одном направлении.
Самый простой вариант — подать ШИМ-сигнал на один из двух транзисторов, а второй оставить постоянно открытым. Сигнал ШИМ в этом случае обычно подается на нижний транзистор (тип N), который обычно быстрее. В этом случае нижний транзистор будет горячее верхнего из-за количества тепла, выделяемого при включении транзисторов. Чтобы сбалансировать счет, сигнал ШИМ можно переключать между транзисторами, расположенными выше (в одном корпусе) и ниже по потоку. Можно использовать ШИМ обоих транзисторов одновременно, но из-за разницы в транзисторах это менее эффективно, а также увеличивает нагрев из-за переключения транзисторов. В этой системе управления два других транзистора работают как диоды. К счастью, максимальный ток через диоды приходится на максимальный рабочий цикл ШИМ, и диоды задействованы очень короткое время.
Чтобы исключить ток, протекающий через диоды, которые выделяют значительное тепло, двигатель никогда не отключается от напряжения, а может быть повернут в противоположном направлении. Так, например, 70% сигнала ШИМ должно быть повернуто вправо, а 30% — влево. Это дает общую скорость 70% — 30% = 40% на правой стороне. Однако сюда не входит диод. Этот метод управления называется дополнительным управлением. Эта схема требует наличия большого конденсатора в линии питания и источника питания (например, батареи), из которого можно брать энергию.
Вместо того чтобы вращать двигатель в разных направлениях, можно использовать диод. Это означает, что когда сигнал ШИМ низкий, он тормозит двигатель и открывает два верхних транзистора. На практике все эти методы существенно не изменяют скорость вращения двигателя, но эффективно контролируют нагрев полевых транзисторов. В этой статье вы можете подробнее ознакомиться с функциями различных схем управления.
На этом мы завершаем статью о двигателях. В этой статье вы можете перейти к реальному конструированию платы управления четырьмя двигателями для робота.







