Двигатели также могут быть оснащены плоскими шестернями и установлены в одном корпусе. В основном это промышленные агрегаты, используемые в станках, конвейерах и другом оборудовании.
Асинхронный двигатель
Здравствуйте, дорогие читатели! Сегодня вы узнаете, что такое асинхронный двигатель, рассмотрите его основные характеристики и поговорим о его преимуществах и недостатках.
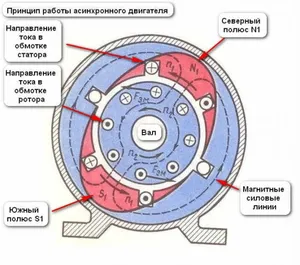
Принцип работы любого асинхронного двигателя основан на физическом взаимодействии между магнитным полем, возникающим в статоре, и током, который это поле вызывает в обмотке ротора. Электрическое напряжение подается на катушку статора, которая состоит из трех групп катушек. Напряжение служит для наведения трехфазного переменного тока в обмотке, который генерирует вращающееся магнитное поле. При пересечении замкнутой обмотки ротора это поле генерирует ток в обмотке ротора в соответствии с законом электромагнитной индукции.
Взаимодействие между вращающимся магнитным полем (статор) и током (ротор) создает электромагнитный момент, который приводит ротор в движение. Сумма крутящих моментов, создаваемых отдельными проводниками, создает результирующий крутящий момент, пару электромагнитных сил, которая заставляет ротор вращаться в направлении, в котором движется электромагнитное поле в статоре. Ротор и магнитное поле вращаются с разными скоростями, т.е. асинхронно (отсюда и название двигателей). В асинхронных двигателях скорость вращения ротора всегда меньше скорости вращения магнитного поля в статоре.
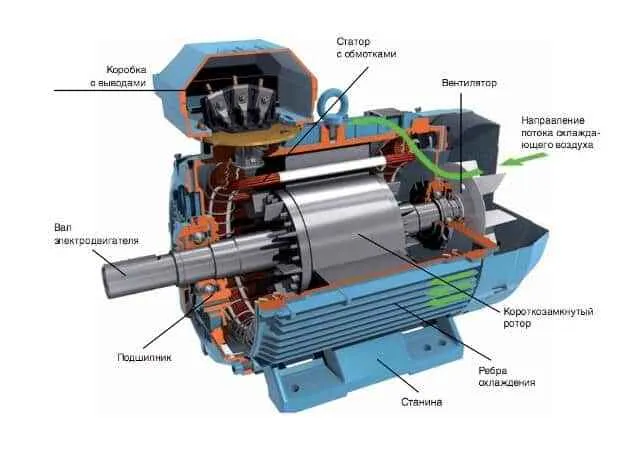
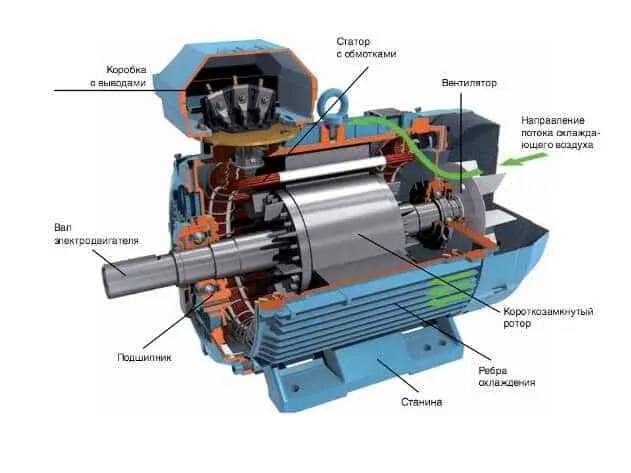
Рисунок 1. Асинхронный двигатель
Двигатель с асинхронным фазным ротором необходим для механизмов, требующих высокого пускового момента — лифты, краны, мельницы и т.д. В таких машинах необходимо достичь максимального крутящего момента уже при запуске двигателя, но при этом ограничить значение пускового тока.
Основными компонентами асинхронного двигателя являются ротор и статор, которые разделены воздушным зазором. Активными частями двигателя являются магнитопровод и обмотки, а остальные части — это конструктивные детали, обеспечивающие необходимую жесткость, прочность, вращательную способность и устойчивость, охлаждение и т.д.
Статор — это твердая часть, а на внутренней стороне сердечника находятся обмотки. Обмотка статора представляет собой трехфазную обмотку (как правило, многофазную), в которой проводники равномерно распределены по окружности статора и расположены фазно в пазах, с угловым шагом 120 п.м. Фазы обмотки статора соединяются в стандартное соединение звезда или треугольник и подключаются к трехфазной сети. При вращении (изменении) магнитного потока в обмотках возбуждения происходит перемагничивание магнитопровода статора. Поэтому он изготовлен из специальной электротехнической стали, которая минимизирует магнитные потери.
Асинхронные двигатели, особенности пуска
В настоящее время асинхронные двигатели составляют 80% всех электродвигателей, производимых промышленностью во всем мире. Это объясняется их простой конструкцией, легкостью в эксплуатации и обслуживании, низкой стоимостью и высокой надежностью. Однако есть один существенный недостаток: асинхронные двигатели получают реактивную мощность из сети. Поэтому их предельная мощность напрямую зависит от мощности электросети. Кроме того, они имеют пусковой ток, который в три раза превышает рабочий ток. Если в сети слишком низкое напряжение, это может привести к значительному падению напряжения в сети и отключению других устройств. Роторно-фазные асинхронные двигатели могут запускаться с низким пусковым током благодаря введению пусковых токов в цепь ротора.
Резисторы в цепи ротора помогают ограничить ток не только при запуске, но и при торможении, реверсировании и замедлении. По мере ускорения двигателя — ускорения для поддержания требуемого ускорения — резисторы оттягиваются назад. Когда ускорение завершено и двигатель достигает номинальной частоты, все резисторы шунтируются, и двигатель переключается на свои естественные механические характеристики.
Рассмотрим пример запуска асинхронного двигателя с намотанным фазным ротором.
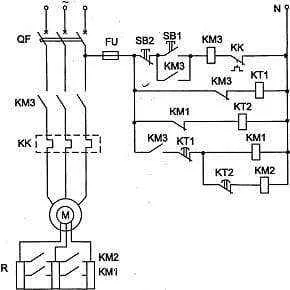
Рисунок 3. Асинхронный двигатель с фазным ротором, пусковая схема.
Используя принципиальную схему асинхронного двигателя (рис.), рассмотрим двухступенчатый пуск, который осуществляется с помощью релейно-связного устройства. В то же время и на токовую цепь, и на цепь управления подается напряжение — выключатель QF замкнут.
Когда напряжение подается, реле времени (обозначенные KT1 и KT2) в цепях управления активируются и их контакты размыкаются. При нажатии кнопки пуска (SB1) активируется контактор KM3, и двигатель запускается с помощью резисторов, вставленных в цепь ротора — в это время контакторы KM1 и KM2 обесточены. Когда контактор KMZ активируется из-за сбоя питания, реле KT1 замыкает контакт через промежуток времени, определяемый задержкой времени на реле KT1. По истечении времени (двигатель разгоняется, ток ротора начинает уменьшаться), включается контактор КМ1 — шунтируется первая ступень пусковых резисторов. Ток снова увеличивается, но начинает уменьшаться, когда двигатель ускоряется. В то же время реле КТ2 в цепи размыкается, обесточивается и с установленной задержкой замыкается контакт в цепи контактора КМ2. Второй каскад резисторов, включенных в цепь ротора, шунтируется. Двигатель работает нормально.
Благодаря ограничению пускового тока асинхронный двигатель с фазным ротором можно устанавливать и в слабых сетях.
Порядок подключения асинхронного двигателя приведен на видео :
Асинхронные двигатели, плюсы и минусы
Как уже упоминалось, он имеет два основных преимущества по сравнению с двигателем с короткозамкнутым сепаратором:
- двигатель может быть запущен, когда к валу уже подключена значительная нагрузка; — двигатель создает высокий крутящий момент с самого начала.
- Ограничение тока инвертора позволяет устанавливать асинхронные двигатели с фазным ротором в низковольтных сетях
Среди других преимуществ стоит отметить следующие
- высокая перегрузочная способность
- низкие колебания скорости — скорость остается примерно одинаковой при различных нагрузках
- возможность установки автоматических устройств управления — пусковых устройств
Следует также отметить следующие недостатки
- введение резисторов в цепь ротора делает двигатель более сложным и дорогим
- большие размеры
- более низкий КПД, чем у двигателей с коротким замыканием и cos φ
- при неполной нагрузке cos φ имеет минимальное значение.
На практике асинхронные двигатели с фазным ротором оптимально подходят для случаев, когда не требуется широкое и плавное регулирование скорости и требуется очень высокая мощность двигателя (особенно на начальном этапе). Для правильного подключения асинхронного двигателя важно правильно определить начало и конец фазных обмоток. Как это сделать, подробно объясняется в видеоролике:
Обмотки двигателей с фазным ротором изолированы в начале и сварены на концах с контактными кольцами, которые позволяют подключать пусковой и регулирующий резистор. Цепь ротора оснащена дополнительным резистором, который позволяет регулировать скорость и снижать пусковые токи.
Разные типы двигателя
В отличие от трехфазных двигателей, однофазные асинхронные двигатели часто используются в бытовой технике — пылесосах, стиральных машинах, вентиляторах, кухонных комбайнах, блендерах и т.д. Они также используются в магнитофонах и проигрывателях пластинок. Даже внутри персонального компьютера имеется более одного асинхронного двигателя. Но к конструкции этой версии двигателя мы вернемся чуть позже.
Трехфазный асинхронный двигатель был первым двигателем, основанным на взаимодействии электромагнитных полей. Основными компонентами асинхронного двигателя являются статор и ротор. Поэтому статор является той частью, которая остается неподвижной. Эта деталь расположена непосредственно под внешним корпусом устройства и имеет форму цилиндра. В этой секции три обмотки расположены по кругу — под углом 120° друг к другу.
В современных двигателях можно измерить несколько обмоток, но они подключены таким образом, что каждая последующая обмотка имеет другое фазовое положение, чем предыдущая, а сдвиг фаз между соседними обмотками составляет 120°. Обмотки обматываются медным проводом, и к каждой группе подключается напряжение разной фазы. Таким образом, вы видите, что магнитное поле внутри этих обмоток движется как бы по кольцу.
Статор также имеет свои собственные обмотки. Поскольку к статору ток не подводится, то вместо обмоток он имеет право иметь замкнутый проводник, иногда сформированный в виде так называемой беличьей клетки. Эта деталь похожа не на клетку для проворного грызуна, а на беличье колесо, которое используется для рассеивания неконтролируемой энергии животного. «Клетка улитки» устройства формируется путем заливки расплавленного алюминия в пазы сердечника из профилированных стальных листов. Такое устройство называется ротором с короткозамкнутым сепаратором.
Когда статор выполнен с реальными обмотками, он обычно многополюсный. Этот ротор называется фазным ротором. Обмотки этого ротора закорочены в форме звезды или треугольника.
Ротор имеет свой собственный вал, который поддерживается задним и передним подшипниками. Они, в свою очередь, крепятся к корпусу двигателя, чтобы ротор мог свободно вращаться внутри статора. Принцип работы асинхронных двигателей основан на том, что в обмотках или «клетке» статора индуцируется магнитное поле. Это вызывает ток в проводниках ротора и, следовательно, собственное магнитное поле.
Переменное магнитное поле статора притягивает ротор, и он начинает вращаться. Однако магнитное поле ротора всегда отстает от поля статора, и эти два поля не могут вращаться синхронно. В результате ротору приходится преодолевать множество действующих на него сил:
- гравитация,
- Трение качения (если используется подшипник или шарикоподшипник),
- трение скольжения (если в качестве подшипника используется медная втулка),
- Сила противодействия движущегося оборудования.
Последняя сила зависит от многих факторов и не может быть сведена к простому физическому параметру. Если вам нужно привести в движение трамвай, двигатель должен принять на себя нагрузку от шестерни, которая должна вращаться, каретки, которая должна двигаться, и трения качения, оказываемого колесами транспортного средства.
Система управления трёхфазным двигателем (инвертор)
Выше мы дали краткий обзор трехфазного тока и трехфазного асинхронного двигателя. Фактически, этот материал занимает очень большую часть электротехники с описанием всех физических процессов трехфазной системы.
Как же работает трехфазный асинхронный двигатель в бытовой стиральной машине, подключенной к однофазной сети переменного тока 220 вольт?
Для того чтобы трехфазный двигатель работал максимально эффективно в однофазной системе, используется относительно сложный электронный преобразователь, так называемый инвертор. Принципиальная схема инвертора показана ниже (рисунок 4).
Рис. 4 Схематическое изображение инвертора Этот инвертор имеет отдельное подключение постоянного тока. Напряжение сети переменного тока преобразуется в постоянное с помощью диодного моста, сглаживается индуктором (L) и конденсатором (C), термистор (NTC) используется для защиты схемы от перегрузок по току. Индуктивность и емкость выпрямителя также служат фильтром, который защищает сеть от пульсаций при переключении двигателя.
Сеть переменного тока также питает источник прерывистого питания, который вырабатывает пониженное напряжение постоянного тока с различными значениями для питания системы управления. Постоянное напряжение на выходе выпрямителя подается в силовую часть инвертора, которая оснащена IGBT (биполярный транзистор с изолированным затвором). На схеме IGBT расположены как Q1, Q2, Q3, Q4, Q5, Q6. Между эмиттером и коллектором установлен диод для защиты транзистора от чрезмерной перегрузки по току, возникающей при переключении обмотки двигателя.
Инвертор преобразует постоянное напряжение в трехфазное (или однофазное) импульсное напряжение с переменной амплитудой и частотой. На основании управляющих сигналов каждая обмотка электродвигателя подключается к положительному и отрицательному полюсу муфты постоянного тока через соответствующие силовые транзисторы инвертора. Управляющие сигналы поступают от драйверов (микросхем управления) IR1, IR2, IR3 на затворы транзисторов.
Сигнал к водителям поступает от цифрового сигнального процессора (DSP) системы управления. Эти процессоры специально разработаны для управления двигателями. Время включения каждой обмотки в течение периода повторения импульсов модулируется синусоидально. Чем выше частота переключения транзисторов, тем выше скорость вращения ротора трехфазного двигателя, поэтому этот метод управления двигателем называется частотным управлением.
Реверсирование вращения двигателя достигается путем изменения последовательности переключения транзисторов инвертора.
Алгоритм управления двигателем основан на цифровом сигнальном процессоре.
Тахогенератор (Т) (рис. 4) на валу двигателя является звеном обратной связи между двигателем и блоком управления, которое поддерживает необходимую постоянную скорость во время различных фаз работы стиральной машины. Сигнал от тахогенератора используется для определения дисбаланса барабана на этапе отжима, а в некоторых моделях стиральных машин даже производится приблизительное взвешивание белья путем сравнения характера сигналов тахогенератора при пустом и полном барабане.
Преимущества асинхронных двигателей
Принцип работы асинхронного двигателя дает ряд преимуществ для этого прибора:
- Простая конструкция делает его производство экономичным.
- Низкое энергопотребление делает агрегаты, оснащенные таким двигателем, экономичными.
- Гибкое применение в приложениях, где не требуется точный контроль скорости или где имеется контур управления для обеспечения поддержания скорости.
- Высокая надежность в эксплуатации.
- Асинхронный двигатель может работать в однофазном подключении.
Используя принципиальную схему асинхронного двигателя (рис.), рассмотрим двухступенчатый пуск, который осуществляется с помощью релейно-связного устройства. В то же время и на токовую цепь, и на цепь управления подается напряжение — выключатель QF замкнут.
Устройство асинхронного двигателя
Конструкция асинхронного двигателя довольно проста:
- Статор — это неподвижная часть электродвигателя, оснащенная обмотками возбуждения.
- Ротор — это вращающаяся часть двигателя, которая вращается под действием магнитного поля, создаваемого обмотками возбуждения статора. В зависимости от конструкции ротора различают 2 типа двигателей: короткозамкнутые и фазные; — статическая часть электродвигателя, которая содержит опорные подшипники, удерживающие ротор и образующие своеобразную опору для статора. Он крепится соединительными винтами между двумя фланцами крышки. В качестве альтернативы они также могут быть привинчены к корпусу статора.
- Клеммная коробка — это часть статической конструкции двигателя, в которую вставляются концы обмоток от статора. Он используется для подключения двигателя к цепи управления.
- Рабочее колесо и защитный кожух — служат для принудительной вентиляции, а кожух защищает оператора от травм.
- Дополнительные сервисные обмотки — при необходимости на статоре, помимо обмотки возбуждения, может быть предусмотрена дополнительная обмотка для контроля и измерения рабочих параметров двигателя во время работы.
- Термодатчики — промышленные асинхронные двигатели оснащены термодатчиками в дополнение к обмоткам для контроля перегрева в случае внезапного увеличения потребляемой мощности.
Двигатели также могут быть оснащены плоскими шестернями и установлены в одном корпусе. В основном это промышленные агрегаты, используемые в станках, конвейерах и другом оборудовании.
Особенности устройства каждого из элементов
Статор асинхронного электродвигателя представляет собой цилиндр, изготовленный из окрашенных электротехнических листов толщиной до 0,5 мм. Этот цилиндр является сердечником, а внутри него находятся пазы, в которых размещаются обмотки. В трехфазных вариантах они смещены на 120 градусов каждый, в однофазных — на 90 градусов. Обмотки могут быть уложены различными способами, в зависимости от прилегающей конструкции и функциональных требований. Это определяет крутящий момент и мощность на валу. Если число полюсов больше 2 пар полюсов, статор может быть использован в серводвигателях.
Статор либо запрессовывается в корпус, либо устанавливается между фланцами. Корпус и боковые крышки изготовлены из чугуна или алюминиевого сплава. Они ребристые для увеличения площади поверхности и улучшения отвода тепла во время работы. Такое расположение позволяет лучше охлаждать двигатель и обеспечивает непрерывную работу при экстремальных нагрузках.
Униполярная обмотка этого двигателя состоит из 3 катушек. Каждая фаза называется фазой. Обмотки располагаются в противоположных пазах сердечника для достижения необходимой мощности двигателя. Катушки соединяются между собой особым образом в соответствии с принципиальной схемой и ожидаемой мощностью, чтобы обеспечить возбуждение магнитного поля и требуемый крутящий момент при вращении.
Все концы датчиков выведены на клеммную коробку, чтобы их можно было соединить в звезду или треугольник, в зависимости от схемы и размера источника питания. Трехфазный двигатель может использоваться универсально и при необходимости может быть подключен к однофазной сети. При соединении треугольником напряжение на обмотке равно Uf (линейное), а при соединении звездой — √3Uf.
Ротор

Ротор асинхронного двигателя представляет собой вал, на котором закреплен сердечник из электрических пластин. В трехфазных и однофазных двигателях ротор по сути одинаков. Обмотка стандартных асинхронных двигателей с рабочей частотой 50 Гц состоит из толстых медных или алюминиевых проводов или стержней, соединенных с короткозамыкающими втулками.
Для того чтобы обмотка надежно удерживалась в сердечнике, в нем имеются специальные пазы, в которые она запрессовывается. Торцевые кольца могут быть оснащены вентиляционными ребрами для улучшения эффективности внутреннего охлаждения. Вал опирается на подшипники, которые крепятся к раме фланцами или пластинами, в зависимости от устройства.
Между валом и статором имеется зазор, величина которого зависит от пусковых параметров двигателя. Когда речь идет об увеличении мощности и крутящего момента, этот зазор должен быть как можно меньше. С увеличением мощности дополнительные потери в верхних слоях статора и ротора возрастают.
Читайте также: Методы испытаний конических резьбовых и плоских пробок и кольцевых калибров для испытания соединений с конической трапецеидальной резьбой (резьба на срез)
ВУЗРУ

Благодаря своим конструктивным особенностям, асинхронный двигатель не имеет некоторых недостатков, характерных для двигателей постоянного тока. Поскольку в короткозамкнутом асинхронном двигателе отсутствуют коммутатор и щетки, он имеет более высокий предел мощности, более высокую перегрузочную способность, более высокую скорость и более высокое допустимое изменение крутящего момента, а также лучшую массу и размеры, чем двигатель постоянного тока. Однако основной проблемой асинхронных двигателей является запуск и управление.
1 Проблема запуска асинхронного двигателя
Пусковые характеристики асинхронных машин характеризуются зависимостью крутящего момента и токов от скорости. Эта зависимость определяет такие характеристики, как потеря энергии обмотки, время запуска и нагрев двигателя. Чтобы уменьшить потери энергии в обмотках двигателя, их нагрев и время запуска, увеличивают пусковой момент и уменьшают пусковой ток.
Пусковой ток не должен превышать значений, указанных для соответствующей цепи, так как высокий пусковой ток для мощного асинхронного двигателя может вызвать большие колебания напряжения в сети, что в свою очередь негативно влияет не только на условия запуска самого агрегата, но и на стабильность других нагрузок, подключенных к сети. Кроме того, при определенных неблагоприятных условиях двигатель может вообще не запуститься при сильном падении напряжения.
Высокие пусковые токи могут оказывать опасное электродинамическое воздействие на обмотки статора и сепараторы червяка. Электромагнитные переходные моменты, возникающие во время переходных процессов при пуске, могут в десять или даже пятнадцать раз превышать статический пусковой момент, что, вместе с предельными температурными нагрузками, ограничивает срок службы асинхронных машин и может привести к усталости обмотки статора.
Рисунок 1.1 — Изменения тока и напряжения в сети во время запуска асинхронного двигателя
В первый момент пуска из-за высокой частоты в обмотке ротора индуцируется электромагнитное напряжение, которое настолько велико, что пусковой ток в 5…7 раз превышает номинальное значение (рис. 1.1). Однако коэффициент мощности цепи ротора во время пуска низкий, поэтому пусковой момент двигателей AD обычно не превышает 0,9 … 1,2 от номинального крутящего момента.
2 Обзор вариантов пуска асинхронного двигателя
Основная проблема при запуске асинхронного двигателя заключается в том, что запуск сопровождается огромными пусковыми токамиIstart=5…7Iн. Причина этого заключается в следующем. По принципу преобразования электрической энергии асинхронный двигатель похож на трансформатор. Поэтому в момент запуска частота сети и частота ротора HED одинаковы. HED ротора может быть определена по следующей формуле:
Где f — частота напряжения,
f — магнитный поток,
k2- коэффициент строительства.
Как видно из формулы 1.1, напряжение ротора пропорционально частоте. Поскольку это асинхронный двигатель, это означает, что скорость возбуждения не совпадает со скоростью вращения ротора. Для того чтобы оценить эту разницу в скорости, было введено скольжение. На основе скольжения затем делаются оценки значений напряжения и частоты.
Формула скольжения:
Где n0- — частота вращения поля статора,
n — частота вращения ротора,
Выведем зависимость между скольжением и частотой напряжения ротора. Для этого необходимо ввести промежуточную величину, характеризующую частоту вращения магнитного поля по отношению к частоте вращающегося ротора.
Тогда частота — это электромагнитное напряжение вращающегося ротора:
Где f — частота сети,
Как вы видите, скольжение находится между нулем и единицей. Номинальный режим работы асинхронного двигателя составляет (2÷5)%. В этом диапазоне пульсации крутящего момента практически исключены. Поэтому для равномерного распределения крутящего момента при ускорении скольжение не должно быть больше S = 0,1. Это достигается путем равномерного повышения частоты сети.
Самый простой способ ввести в эксплуатацию двигатель с короткозамкнутой клеткой — подключить обмотку статора непосредственно к сети с номинальным напряжением обмотки статора (рис. 1.2).
Рисунок 1.2: Схема прямого пуска двигателя.
При запуске асинхронного двигателя без нагрузки активный резистор в его вторичной цепи выделяет тепловую энергию, соответствующую кинетической энергии маховиков, приведенных во вращение, а при запуске под нагрузкой количество выделяемой энергии соответственно увеличивается. Выделение энергии в первичном контуре обычно больше, чем во вторичном. При частых пусках, а также при очень сложных условиях пуска, когда маховики приводных механизмов имеют большие размеры, существует опасность перегрева обмоток двигателя. Чем меньше номинальная мощность двигателя и чем меньше маховики, соединенные с валом двигателя, тем больше число запусков в час и тем сильнее может нагреваться двигатель. В момент запуска, из-за максимальной частоты в цепи ротора двигателя, значение ЭЭД ротора самое высокое и, следовательно, ток в цепи ротора также самый высокий. Из равенства сил в обмотках трансформатора можно сделать вывод, что поскольку ток ротора максимален, ток статора также будет максимальным.
Для борьбы с этим явлением в цепи статора двигателей с короткозамкнутой клеткой используются ограничители тока для снижения напряжения в сети.
Рисунок 1.3 Пусковые токи для прямого пуска двигателя
Как показано на рисунке 1.3, в нашем случае, без описанных методов снижения входного тока, входной ток превышает номинальный более чем в десять раз.
На рисунке 1.4 ниже показаны пульсограммы переменного прямого пуска асинхронных двигателей различной мощности (от 45 до 75 кВт). На пульсограммах четко видны чрезмерные пусковые токи. Кроме того, существует сильная асимметрия в питании.







