Когда сопротивление резистора достигает минимума, обмотка ротора замыкается накоротко, и режим работы такого двигателя не отличается от режима работы обычного короткозамкнутого двигателя.
Асинхронный двигатель — Принцип работы. Две схемы подключения.
Сегодня электрическая энергия является основной движущей силой для работы промышленных и бытовых приборов. Кроме того, основная задача электричества — обеспечить возможность получения механического движения в компактных устройствах, максимально дешевых и долговечных.
Асинхронные двигатели отвечают этим требованиям в максимально возможной степени. Прежде всего, благодаря этому она претерпела большое развитие в технологическом процессе, и на данный момент ей нет альтернативы.
История появления
Первая теоретическая модель асинхронного двигателя появилась в 1888 году и была разработана Галилео Феррарисом. Но самое главное, в описании этой модели сделан вывод о том, что этот тип двигателя неудобен.
Однако русский физик Доливо-Добровольский продолжал работать над созданием этого типа двигателя. Этот тип двигателя был реализован на практике и показал отличные технические и экономические характеристики. С тех пор прошло много времени, и современные асинхронные двигатели практически не отличаются от прототипов.
Производители также смогли улучшить надежность и основные характеристики просто за счет использования новых изоляционных материалов и увеличения теплопередачи, но принцип работы остался практически неизменным.
Упрощенная теория
Для удобства эта статья разделена на две части. Упрощенная теория и более подробная теория. Надеемся, что это принесет пользу читателю.
Упрощенная структура асинхронных двигателей
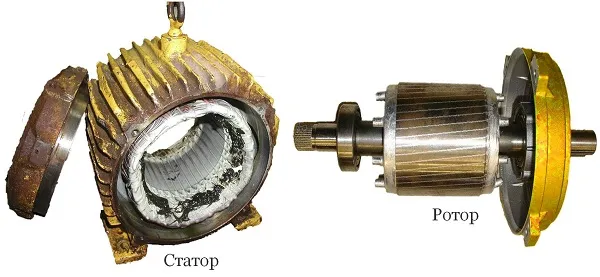
Асинхронные двигатели состоят из двух основных частей. Это статор, который крепится к станине, и ротор, который вращается внутри статора. Между ними обязательно должен быть воздушный зазор. как пространство для построения линий взаимодействующих магнитных полей ротора и статора.
Обмотки статора подключаются к проводам трехфазного напряжения. Медные провода статора создают магнитное поле, когда по ним течет ток.
Поскольку переменный ток изменяется синусоидально, магнитное поле специально расположенных проводов создает вращающееся магнитное поле, заставляя ротор вращаться. Ротор передает движение на приемник механической энергии через вал.
Упрощенный принцип работы асинхронных двигателей
На практике создание вращающегося магнитного поля в электродвигателе означает, что генерируются два магнитных поля (для пары полюсов в минимальном количестве), которые создают иллюзию вращательного движения по окружности. Расположена обмотка статора.
Такой двигатель называется монопольным. Число пар полюсов обозначается буквой «p» и считается, что p=1. В данной статье рассматривается эта наиболее упрощенная версия двигателя для подробного описания электромагнитных процессов внутри электродвигателя. Скорость вращения вала двигателя соответствует 3000 оборотов в минуту.
На анимации различные скорости вращения ротора, немного отстающие от частоты вращения магнитного поля, видны человеческому глазу. Это явление называется скольжением и описано ниже. Электромагнитная муфта является примером асинхронного двигателя. Вращающееся магнитное поле увлекает за собой и ротор асинхронного двигателя.
Для сравнения показана анимация электродвигателя с двумя парами полюсов. Скорость вращения вала ротора такого двигателя снижается в два раза, что соответствует 1500 оборотам в минуту.
Принцип работы трехфазного асинхронного двигателя основан на способности трехфазных обмоток создавать вращающееся магнитное поле при подключении к сети трехфазного тока.
Устройство асинхронного электродвигателя.
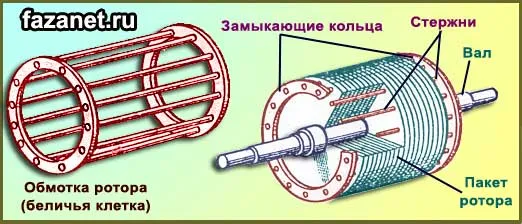
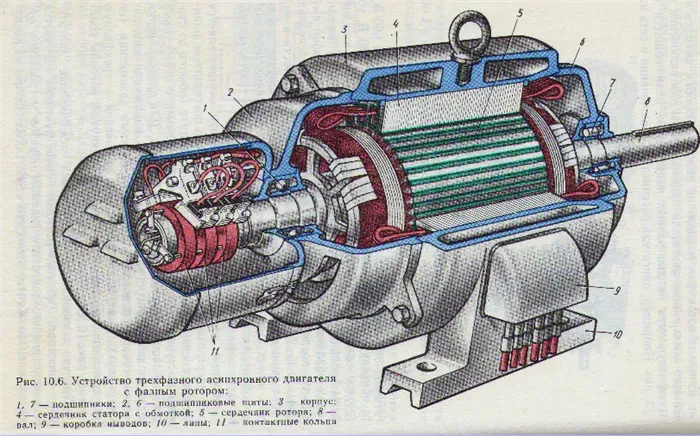
Двигатель состоит из следующих компонентов
1. статор с обмотками. Или рама, которая представляет собой статор с обмотками.
2. ротор. Это происходит в случае короткого замыкания. А если он фазированный, то можно сказать, что это якорь или даже коллектор. Я не думаю, что здесь есть какая-то ошибка.
3. подшипниковые щиты. Силовой двигатель имеет крышку подшипника с уплотнением в передней части.
4. подшипник. В зависимости от конструкции могут быть простыми или антифрикционными.
5. охлаждающий вентилятор. Пластик или металл.
6. корпус вентилятора. С отверстиями для подачи воздуха.
7. Борнео или клеммная коробка. Для подключения кабеля.
Это все основные детали, но они могут немного отличаться в зависимости от типа, вида и конструкции.

Существует два основных типа асинхронных электродвигателей: трехфазные и однофазные. Затем, трехфазные также подразделяются на подтипы: с сепараторным ротором или с фазным ротором.
Наиболее распространенным является трехфазный с сепараторным ротором.
Статор имеет круглую форму и собран из изолированных друг от друга листов специальной стали, эта собранная конструкция образует сердечник с канавками. Обмотки укладываются в пазы сердечника из специальных обмоточных проводов, изолированных лаком. Эта проволока отливается в основном из меди, а также из алюминия. Если двигатель очень мощный, то обмотки выполняются шиной. Обмотки укладываются так, чтобы они были смещены друг относительно друга на 120°. Обмотки статора соединены звездами или дельтами.
Как я уже говорил выше, роторы либо короткозамкнуты, либо сфазированы.
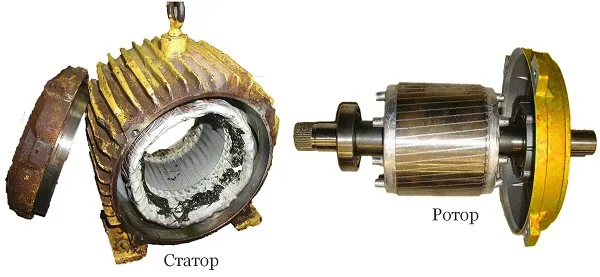
Короткое замыкание представляет собой вал, на котором размещены листы, также из специальной стали. Эти листы образуют сердечник, в пазы которого заливается расплавленный алюминий. Этот алюминий равномерно распределяется по канавке и образует стержни. Эти стержни закрыты алюминиевым кольцом по краям. Создается своего рода «форма клетки».
Фазные роторы представляют собой валы с сердечником и тремя обмотками. Обычно один конец соединяется в форме звезды, а остальные три конца соединяются с контактными кольцами. Затем на эти кольца подается ток с помощью щеток.
Нагрузочный реостат добавляется в цепь фазной обмотки для увеличения эффективного сопротивления при запуске двигателя, тем самым снижая высокий пусковой ток.
Принцип действия.
Когда ток течет в обмотках статора, ток течет в этих обмотках. Как следует из вышеприведенных терминов, фазы смещены друг относительно друга на 120°. Поэтому этот магнитный поток в обмотках начинает вращаться.
При вращении потока статора в обмотках ротора протекает ток, который сам становится магнитным полем. Эти два магнитных поля начинают взаимодействовать, заставляя ротор электродвигателя вращаться. Это происходит при коротком замыкании ротора.
По принципу работы робота, вот видеоклип.
Принцип работы в основном такой же, как и у фазного ротора. Напряжение подается на статор и ротор. Появляются два магнитных поля, которые взаимодействуют и начинают вращать ротор.
Достоинства и недостатки асинхронных двигателей.
Основными преимуществами асинхронных двигателей с сепаратором являются
1. очень простое устройство, снижающее производственные затраты
2. цена намного дешевле по сравнению с другими двигателями
3. очень простая схема запуска.
4. скорость вращения вала не сильно изменяется при увеличении нагрузки.
5. способность выдерживать перегрузки в течение короткого времени.
6. возможность подключения трехфазных двигателей к однофазным сетям.
7. он отличается высокой надежностью и может работать практически в любых условиях.
8. он имеет очень высокий коэффициент полезного действия и cosφ.
1.Скорость вращения ротора невозможно контролировать без потерь мощности.
2.При увеличении нагрузки крутящий момент уменьшается.
3. пусковой момент очень низкий по сравнению с другими машинами.
4. cos φ увеличивается при недостаточной нагрузке.
5. высокий входной ток.
Преимущества двигателей с фазным ротором:.
1. по сравнению с короткозамкнутыми двигателями, он имеет значительно более высокий крутящий момент. Это позволяет ему запускаться под нагрузкой.
2. он работает только с небольшой перегрузкой, а скорость вращения вала практически не меняется.
4. может использоваться с автоматическими стартерами.
2. КПД и cosφ ниже, чем у двигателей с короткозамкнутым ротором. А в случае перегруженности, здесь самые низкие цены
3. необходимо поддерживать в рабочем состоянии щеточный механизм.
На этом статья заканчивается. Если вы найдете его полезным, пожалуйста, поделитесь им со своими друзьями в социальных сетях. Если у вас есть вопросы, пожалуйста, оставляйте их в разделе комментариев и подписывайтесь на обновления. До свидания.
Читайте также статью:.

Очень подробно написано, спасибо! Я не всегда хорошо разбираюсь в двигателях, но ваше изложение хорошо и понятно.
Добавить в статью Майкла Фарадея, изобретателя электродвигателя и великого британского ученого, — неплохая идея. В конце концов, именно он назвал электродвигатель преобразованием электричества в технику.
Кстати, Майкл Фарадей был химиком, а подобные изобретения обычно предназначены для физиков.
В статье не обсуждалась история создания электродвигателя. Об этом можно написать позже в другой статье.
Асинхронный двигатель был изобретен русским ученым Доливо-Добровольским.
‘Напряжение подается на статор и ротор’.
Нет. Статор и ротор не являются синхронными. Вы ошибаетесь. Вот почему я не люблю блогеров. Они пишут о том, чего не знают.
Димитрис, внимательно прочитайте статью. Он говорит, что это относится к фазовым роторам. И я люблю комментаторов, которые приходят и начинают умничать, не имея ни малейшего представления о том, о чем статья.
Однако питание асинхронного двигателя от статического преобразователя частоты устраняет все вышеперечисленные недостатки. Кроме того, при соблюдении правил эксплуатации и отсутствии перегрузок двигатель может безопасно эксплуатироваться в течение длительного времени.
Устройство и принцип действия асинхронного двигателя
Основными компонентами асинхронного двигателя являются статор и ротор, разделенные воздушным зазором. Обмотки и сердечник ротора выполняют активную работу двигателя.
Асинхронный двигатель означает, что скорость вращения ротора отличается от скорости электромагнитного поля.
Статор является неподвижной частью двигателя, его сердечник изготовлен из электромагнитной стали и установлен на раме. Рама статора изготовлена из немагнитных материалов (чугун, алюминий). Обмотка статора представляет собой трехфазную систему, в которой кабели расположены в пазах с углом отклонения 120°. Фазы обмотки стандартно подключаются к сети по схеме «звезда» или «треугольник».

Ротор — это движущаяся часть двигателя. Существует два типа бегунков асинхронного двигателя: бегунки с короткозамкнутой клеткой и бегунки с фазой. Эти типы отличаются конструкцией обмоток ротора.
Асинхронный двигатель с короткозамкнутым ротором
Этот тип электродвигателя был впервые запатентован M.O. Этот тип электродвигателя был впервые запатентован M.O. Доливо-Добровольского многие называют «беличьим колесом» из-за его внешнего вида. Закороченная обмотка ротора состоит из закороченного медного стержня (алюминий, латунь) с кольцом, который вставляется в гнездо обмотки сердечника ротора. Поскольку ротор этого типа не имеет подвижных контактов, эти двигатели очень надежны и долговечны в эксплуатации.
Асинхронные двигатели с фазным ротором
Это устройство позволяет изменять скорость в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, соединенную в звезду или треугольник. Эти двигатели оснащены специальными щетками, с помощью которых можно регулировать скорость вращения ротора. Добавление специального реостата в механизм этих двигателей снижает пусковое сопротивление двигателя и минимизирует пусковые токи, которые могут негативно повлиять на сеть и само устройство.
Принцип действия.
При подаче тока в обмотку статора возникает магнитный поток. Фаза смещена на 120°, что вызывает вращение обмотки. При коротком замыкании ротора это вращение создает ток в роторе и электромагнитное поле. Магнитные поля ротора и статора взаимодействуют, вращая ротор электродвигателя. Если ротор находится в фазе, напряжение подается на статор и ротор одновременно, и в каждом механизме возникают магнитные поля, которые взаимодействуют друг с другом и вызывают вращение ротора.
Достоинства асинхронных электродвигателей
| С бегунком с короткозамкнутой клеткой | С обмотками ротора в одной фазе |
|---|---|
| 1. простое устройство и пусковая цепь | 1. низкий пусковой ток |
| 2. низкая стоимость строительства | 2. переменная скорость. |
| 3. скорость оси не изменяется с увеличением нагрузки. | 3. работает при небольших перегрузках без изменения скорости. |
| 4. может выдерживать перегрузки в течение короткого периода времени | 4. может быть применен автоматический запуск |
| 5. надежная и долговечная работа | 5. высокий крутящий момент |
| 6. подходит для всех условий работы | |
| 7. высокая эффективность. |
| С бегунком с короткозамкнутой клеткой | С обмотками ротора в одной фазе |
|---|---|
| 1. скорость вращения ротора не регулируется | 1. очень большой |
| 2. низкий пусковой момент | 2. низкая производительность |
| 3. высокий пусковой ток | 3. частое техническое обслуживание из-за изношенных щеток |
| 4. сложность конструкции и движения контактов |
Наиболее часто используются асинхронные двигатели, поскольку они являются очень эффективными устройствами с отличными механическими свойствами.
Режимы работы

Асинхронные двигатели являются гибкими устройствами и имеют несколько режимов работы по продолжительности
- Непрерывный, для
- Краткосрочный,.
- Прерывистый? Периодический,.
- Прерывистый,.
- В частности.
Непрерывный режим работы является основным режимом работы асинхронного оборудования и характеризуется непрерывной работой электродвигателя без перерыва в работе при постоянной нагрузке. Этот режим работы является наиболее распространенным и используется на промышленных предприятиях повсеместно.
Кратковременная работа — без достаточного времени для прогрева двигатель работает в течение определенного периода времени (10-90 минут), пока не будет достигнут стабильный заряд. По истечении этого периода он деактивируется. Эта функция используется для подачи таких веществ (вода, нефть, газ).
Прерывистый режим работы — время работы имеет заданное значение и отключается по окончании рабочего цикла. Функция «старт-стоп». Двигатель может быть выключен на короткое время до охлаждения до температуры наружного воздуха, а затем снова включен.
Прерывистая работа — двигатель не нагревается до максимума, но и не успевает остыть до температуры окружающего воздуха. Используется в лифтах, эскалаторах и других устройствах.
Специальные возможности — продолжительность и периоды активации являются необязательными.
В электротехнике существует принцип обратимости для электродвигателей. Это означает, что устройство может преобразовывать электрическую энергию в механическую и наоборот.
Асинхронные двигатели также выполняют этот принцип и имеют режим двигателя и режим генератора.
Работа двигателя — это основной режим работы асинхронных электродвигателей. При подаче напряжения на обмотки возникает электромагнитный момент, ротор притягивается к валу, и вал начинает вращаться. Двигатель вращается с постоянной скоростью и выполняет полезные задачи.
Работа генератора — основана на принципе возбуждения тока в обмотке двигателя при вращении ротора. Когда двигатель механически вращает ротор, в обмотке статора возникает электродвижущая сила, а конденсатор в обмотке генерирует емкостной ток. Когда емкость конденсатора достигает определенного значения, генератор самовозбуждается и появляется трехфазная система напряжения, в зависимости от характеристик двигателя. Таким образом, короткозамкнутый двигатель действует как генератор.
Помещая его в движущееся магнитное поле статора, замкнутые проводники вызывают электромагнитное напряжение, которое генерирует ток. Таким образом, на замкнутый контур действует сила в ампер и он вращается в том же направлении, что и магнитное поле статора.
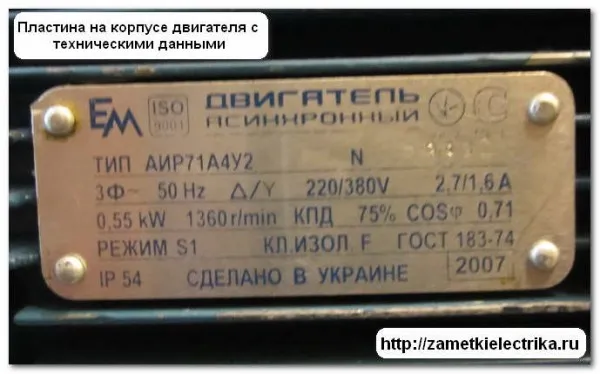
Несколько слов об этикетках.
Каждый двигатель требует наличия на корпусе двигателя таблички со следующими характеристиками
- Тип двигателя (например, AOL 22-4 или AIR71A4)
- Страна и производитель
- Год постройки
- Номинальная мощность, доступная на валу
- Номинальное напряжение (ток)
- Схема соединения обмоток (Y / ∆)
- Коэффициент мощности
- Номинальная скорость (об/мин)
- Эффект
- Режим работы (например, S1)
Асинхронный двигатель. Какой из них наиболее подходящий?
Сравнивая асинхронные двигатели с короткозамкнутыми сепараторами и двигатели с фазными рабочими колесами, можно сделать следующие выводы
Двигатели с короткозамкнутыми сепараторами более сложны, требуют более длительных интервалов технического обслуживания и менее надежны, чем двигатели без короткозамкнутых сепараторов. Однако самым важным преимуществом являются лучшие загрузочные и тюнинговые свойства.
Читайте о них в следующей статье: (Список будет дополнен, когда статья будет написана)
Υ.Γ. На этом мы завершаем статью об асинхронных двигателях и их применении. Спасибо за внимание.
На графике буква «n» обозначает скорость вращения ротора. Буква «m» указывает на ось крутящего момента. Пунктирная линия показывает возможный график работы двигателя, состоящий из частей трех различных графиков для трех различных состояний бегущей фазы.
Скольжение S
Параметры скольжения присутствуют во всех асинхронных энергоблоках. Он возникает из-за разности скоростей магнитных полей статора и ротора. Электродвижущая сила на стержне возникает только тогда, когда стержень движется относительно магнитного поля. Ротор немного отстает.
Если скорости вращения одинаковы, то прут клетки не может двигаться дальше, потому что через него не течет ток. Поэтому для всех конструкций и всех рабочих нагрузок ротор движется со скоростью, немного меньшей, чем магнитное поле.
Скольжение измеряется в процентах. На холостых оборотах значение стремится к нулю. Если ротор заблокирован (замкнут накоротко), параметр равен 1. В короткозамкнутой индукционной системе параметр скольжения зависит от нагрузки.
Пусковой ток
Немедленный запуск двигателя характеризуется значительно более высоким уровнем тока, чем для двигателя, находящегося в стационарном режиме. Пусковой ток может в 5-8 раз превышать номинальный ток. Номинальный ток всегда указывается производителем на заводской табличке двигателя, тогда как пусковой ток приводится только в технической документации. В технических характеристиках этот параметр обозначается как отношение пускового тока к номинальному току.
Как рассчитывается пусковое напряжение?

Существует несколько способов расчета пускового тока асинхронного двигателя. Эти опции полезны, если значение причины не указано в технической документации или если сопроводительная документация была утеряна.
- Осциллограф. Показания проверяются при запуске с помощью резистивного байпаса. Фактическое напряжение рассчитывается по максимальному амплитудному значению, а пусковой ток определяется по закону Ома. Преимущество этого метода заключается в том, что он предоставляет конкретные данные для определенного двигателя.
- Низкое напряжение. В этом варианте на двигатель подается 5-10-кратное напряжение, которое измеряется. После пересчета получается входной ток. Пока измеряется одна фаза. На других фазах входные значения должны быть одинаковыми. Этот метод используется в производственной среде для получения данных, отображаемых в таблице. Поскольку базой является номинальный ток, входные значения могут быть разными во всех случаях.
- Клеммный измеритель. Простой и быстрый метод. Наиболее точные измерения достигаются при измерениях в системах с длительным временем запуска и высокой инерционностью. Например. Вентиляторы или двигатели с огромными крыльчатками.
- Трансформеры. Методы, используемые в измерительных центрах. При использовании трансформаторов не обязательно измерять фактический ток, а только значение, уменьшенное в определенное число раз. Основным недостатком этого метода является то, что хотя трансформаторы рассчитаны на диапазон частот 50-60 Гц, переходные входные токи могут быть шире и иметь больше гармоник.
Важно помнить, что в зависимости от некоторых факторов, входные токи, указанные производителями, могут быть во много раз выше реальных значений.
Как снизить пусковое напряжение асинхронных двигателей

Во многих случаях высокая пусковая мощность является проблемой, вызывая перегрузку электросети, перегрев и повышенный износ двигателя. Поэтому, чтобы сохранить эффективность и долговечность вашей системы, необходимо уметь снижать цену. Существует несколько способов сделать это
- Мягкое начало. При этом методе напряжение сначала снижается на двигателе, а затем постепенно увеличивается до номинального напряжения. Для применения этого метода используется устройство плавного пуска или преобразователь частоты.
- Ограничитель. В этом варианте в качестве ограничивающего фактора при запуске используется высокоомный резистор. Когда таймер активируется, двигатель возвращается к номинальному значению. Для сборки такого пускателя достаточно контактора и реле времени, поэтому вы можете собрать его самостоятельно.
- Дельта стартер. Это особый способ соединения обмоток, который позволяет одновременно осуществлять мгновенный пуск и реверс с использованием максимального напряжения, но постепенно увеличивает магнитное поле двигателя до номинальной мощности. Такой подход помогает поддерживать работоспособность устройства. Конструкции таких соединений можно найти в Интернете.
Преимущества и недостатки короткозамкнутой разновидности
Большая популярность и востребованность таких конструкций двигателей обусловлена их преимуществами
- Высокая стабильность работы при номинальной нагрузке,.
- Надежность и долговечность,.
- простота обслуживания асинхронных двигателей, низкие эксплуатационные расходы, низкая
- низкая стоимость по сравнению с другими моделями, и
- высокая эффективность двигателя.
При правильной эксплуатации такие устройства могут работать в течение длительного времени без необходимости частого технического обслуживания.
Однако эта система имеет следующие недостатки
- Высокие уровни пускового напряжения,.
- низкий коэффициент скольжения, и
- повышенная реакция на колебания напряжения, и
- необходимость в дополнительном оборудовании для безопасного запуска асинхронных машин (контроллеры, преобразователи частоты)
- необходимость во внешнем блоке управления для регулирования скорости вращения.
Несмотря на свои недостатки, асинхронные короткозамыкатели наиболее практичны и популярны в производственном и бытовом применении.
Однако сегодня большинство двигателей являются асинхронными, хотя современные двигатели имеют множество конкурентных преимуществ. Промышленность, сельское хозяйство, коммунальное хозяйство и многие другие отрасли используют их благодаря их высокой эффективности. Однако производительность может быть значительно снижена из-за таких параметров, как
Управление асинхронным двигателем
-
Способы подключения асинхронного электродвигателя к сети питания:
- Подключение к устройствам плавного пуска
Прямое подключение к сети
Магнитные пускатели можно использовать для управления асинхронными двигателями, подключая двигатель непосредственно к источнику питания переменного тока.
Магнитные пускатели можно использовать для реализации схем.
Тепловые реле могут использоваться для защиты двигателя от значений тока, значительно превышающих номинальное значение.
Необратимые цепи
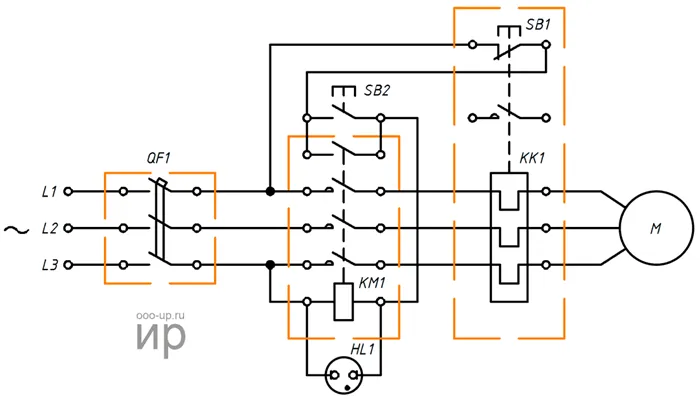
Схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного тока через магнитные пускатели L1, L2 и L3 — контакты для подключения к трехфазной сети переменного тока, QF1 — выключатель питания, SB1 — кнопка стоп, SB2 — кнопка пуск, кнопка пуск, KK1 — тепловое реле, HL1 — сигнальная лампочка, M -Трехфазный асинхронный двигатель
Реверсивная электрическая схема
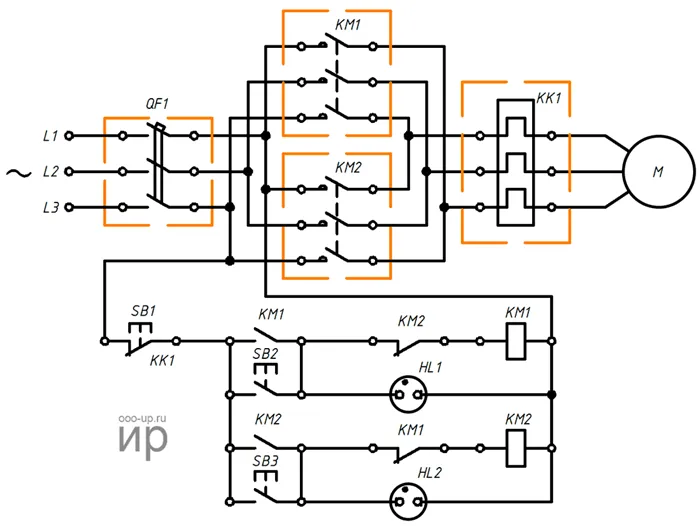
Реверсивная электрическая схема для подключения 3-фазного асинхронного двигателя к 3-фазной сети переменного тока через магнитные пускатели L1, L2, L3 — контакты для подключения к 3-фазной сети переменного тока, QF1 — выключатель питания, KM1, KM2 — магнитные, K1 M — 3-фазный асинхронный двигатель, SB1 — кнопка остановки, SB2 — пуск вперед кнопка, SB3 — кнопка запуска заднего хода, HL1, HL2 — индикаторные лампы
Недостатком переключения непосредственно на обмотку асинхронного двигателя сетевого питания является наличие высоких пусковых токов при запуске двигателя.
Устройство плавного пуска для асинхронных двигателей
В тех случаях, когда скорость двигателя не нужно регулировать во время работы, для снижения пускового тока используются плавные пускатели.
Плавные пускатели защищают асинхронные двигатели от повреждений, вызванных внезапным увеличением потребляемой мощности во время пуска, и ограничивают пусковой ток. Плавные пускатели позволяют асинхронным двигателям плавно ускоряться и замедляться.
Устройства плавного пуска дешевле и компактнее, чем преобразователи частоты. Они используются, когда регулировка скорости и крутящего момента требуется только при запуске.
Частотное управление асинхронными двигателями
Частотные преобразователи используются для управления скоростью и моментом асинхронных двигателей. Принцип работы преобразователей частоты основан на изменении частоты и напряжения переменного тока.
-
Использование частотного преобразователя позволяет:
- Снижение энергопотребления двигателя,.
- Контроль оборотов двигателя (плавный запуск и остановка, регулировка оборотов во время работы); и
- предотвращение перегрузок двигателя и продление срока службы.
-
В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем: ; .
Трехфазный асинхронный двигатель с фазным ротором
Асинхронные двигатели — это асинхронные двигатели, в которых обмотки ротора соединены с контактным кольцом1.
До широкого применения преобразователей частоты асинхронные двигатели средней и большой мощности изготавливались с использованием фазовращателей. Трехфазные асинхронные двигатели (ADFM) обычно используются для тяжелых условий пуска. В качестве крановых двигателей переменного тока или для привода устройств, требующих бесфазного регулирования скорости.
Проектирование АДФР
Фаза ротора
Фазный ротор по сути представляет собой трехфазную обмотку (аналогично обмотке статора), которая вставляется в гнездо в сердечнике ротора. Фазные концы этой обмотки ротора обычно соединены звездой, а пусковые концы соединены контактными кольцами, изолированными друг от друга и от вала. Трехфазный пусковой или регулирующий штекер обычно подключается к контактным щеткам. Асинхронные двигатели с фазным приводом имеют лучшие характеристики запуска и управления, но они более сложные, чем двигатели с короткозамкнутым ротором.

Statis ADFR.
Статор короткозамкнутого асинхронного двигателя идентичен статору короткозамкнутого асинхронного двигателя.
Определение выводов вспомогательной обмотки трехфазного АДФР
| Схема подключения обмоток, наименование фаз и выходов | Название торговой точки | |
|---|---|---|
| Inception | Конец. | |
| Разомкнутая цепь (6 проводников) | ||
| Фаза 1 | K1 | K2 |
| Фаза 2 | L1 | L2 |
| Фаза 3 | M1 | M2 |
| Соединение звездой (количество проводников 3 или 4) | ||
| Фаза 1 | K | |
| Фаза 2 | L | |
| Фаза 3 | M | |
| Starpoint (нулевая точка) | Q | |
| Дельта-соединение (3 воздуховода) | ||
| Первая зацепка | K | |
| Второй выход | L | |
| Третий ведущий | M | |
Наименования выводов обмотки ротора трехфазных машин, ранее разработанных и модернизированных в соответствии с ГОСТ 26772-85
| Схема подключения обмоток, наименование фаз и выходов | Название торговой точки | |
|---|---|---|
| Соединение звездой (количество проводников 3 или 4) | ||
| Фаза 1 | P1 | |
| Фаза 2 | P2 | |
| Фаза 3 | P3 | |
| Нулевая точка | 0 | |
| Дельта-подключение (количество воздуховодов 3) | ||
| Первая зацепка | P1 | |
| Второй выход | P2 | |
| Третий ведущий | P3 | |







