Таким образом, принцип работы асинхронного двигателя основан на взаимодействии магнитного поля вращающегося бегунка и курсорного тока того же поля. Необходимым условием для возникновения крутящего момента является разница в частоте вращения полей.
Устройство, виды и принцип действия асинхронных электродвигателей
Электрическая наука быстро развивалась в 19 и 20 веках, что привело к разработке электрических асинхронных двигателей. С помощью этих устройств развитие промышленной индустрии ушло далеко вперед, и сейчас невозможно представить себе завод или фабрику, даже использующую асинхронные электродвигатели.
История появления
История асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал свою систему электродвигателей. В том же году другой ученый-электрик, Галилео Феррарис, опубликовал статью о теоретическом асинхронном двигателе.
В 1889 году русский физик Михаил Осипович Дрибо-Добровольский получил немецкий патент на асинхронный трехфазный электродвигатель.
Все эти изобретения помогли усовершенствовать электрические машины и привели к их широкому применению в промышленности, значительно ускорив все технические процессы в производстве, повысив эффективность и снизив интенсивность труда.
В настоящее время наиболее распространенным электродвигателем, используемым в промышленности, является оригинальный электродвигатель, созданный Доливо-Добровольским.
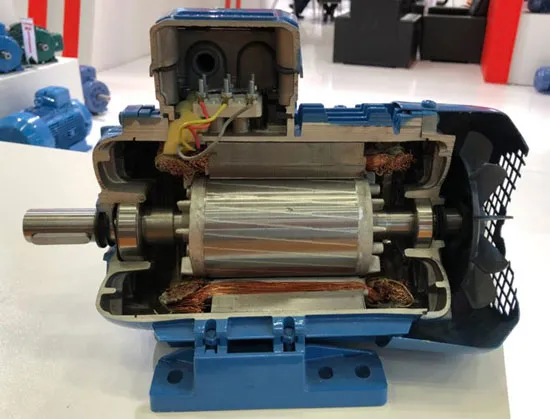
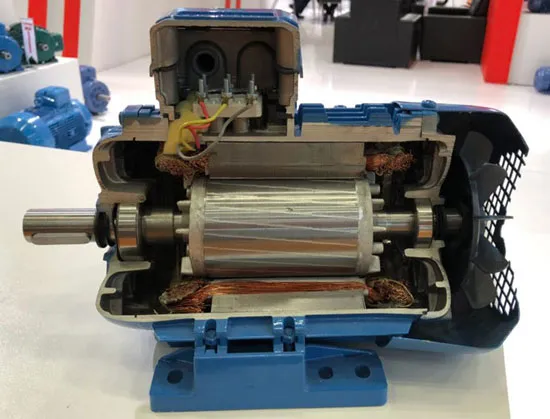
Устройство и принцип действия асинхронного двигателя
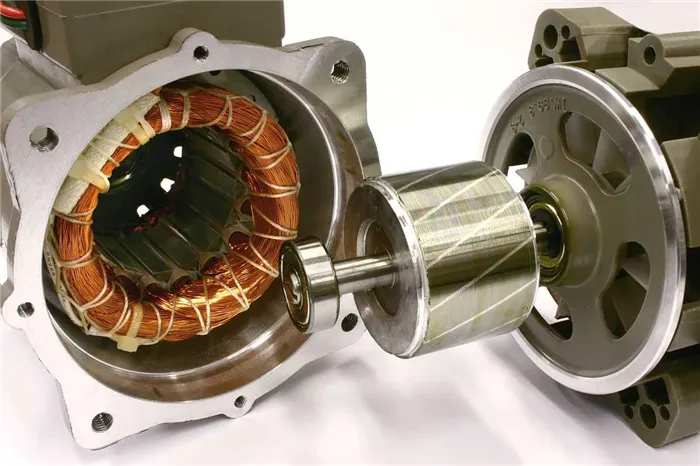
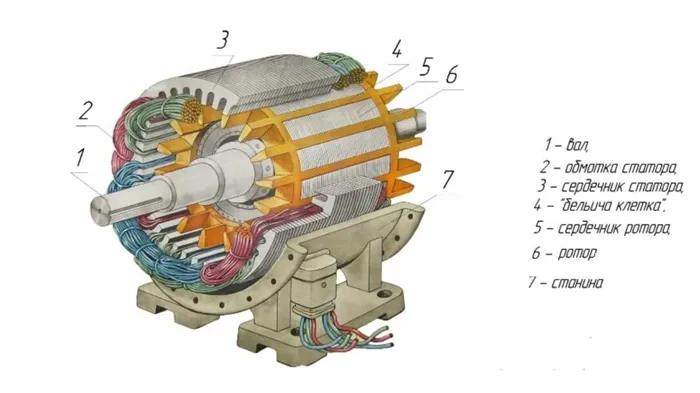
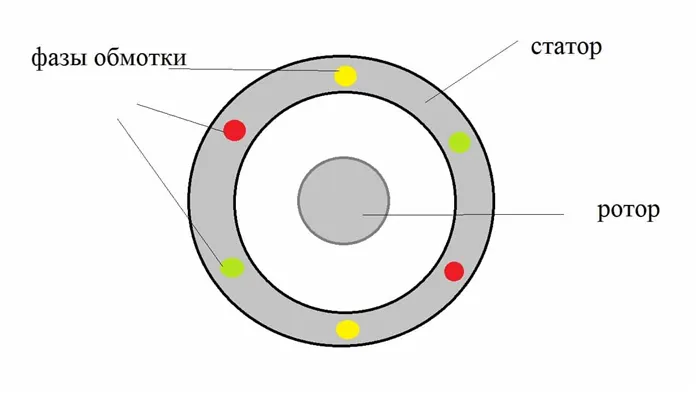
Основными компонентами асинхронного электродвигателя являются статор и бегунок, разделенные воздушным зазором. Активную работу в двигателе выполняют обмотка и сердечник бегунка.
Асинхронный двигатель означает, что скорость курсора отличается от скорости электромагнитного поля.
Статор является постоянной частью двигателя, его сердечник изготовлен из электротехнической стали и установлен на раме. Старые рамы отливаются из немагнитных материалов (чугун, алюминий). Обмотка статора представляет собой трехфазную систему, в которой кабель крепится к прорези с углом обхода 120°. Обмотки подключаются к сети по схеме «звезда» или «треугольник», например, стандартно.

Ротор — это движущаяся часть двигателя. Асинхронные двигатели имеют два типа бегунков: бегунки короткого замыкания и фазовые бегунки. Эти типы отличаются извилистой конструкцией бегунка.
Асинхронные двигатели с короткозамкнутым ко
Этот тип электродвигателя был впервые запатентован M.O. Доливо-Добровольского и широко известен как «беличье колесо» из-за своего внешнего вида. Короткий циркулирующий бегунок состоит из короткого вращающегося медного стержня (алюминий, латунь), который вставляется в паз катушки в сердечнике курсора. Поскольку в курсоре этого типа нет подвижных контактов, эти двигатели очень надежны и устойчивы в эксплуатации.
Асинхронные двигатели с Розмари.
Это устройство позволяет изменять скорость в широком диапазоне. Фашистские бегунки представляют собой трехфазные обмотки, соединенные по схеме «звезда» или «треугольник». Эти двигатели оснащены специальными щетками, с помощью которых можно регулировать скорость вращения ротора. Добавление специальных стоек к механизму этих двигателей снижает пусковое сопротивление двигателя и минимизирует пусковые токи, которые могут быть губительны для сети и самого устройства.
Принцип действия.
При протекании тока в обмотке статора возникает магнитный поток. Поскольку фаза смещена на 120°, это вызывает вращение тока в обмотке. При коротком замыкании ротора это вращение создает ток в роторе и электромагнитное поле. Магнитные поля ротора и статора взаимодействуют, вращая ротор электродвигателя. Когда ротор фазирован, напряжение подается одновременно на статор и ротор, генерируя магнитные поля в каждом механизме, которые взаимодействуют для вращения ротора.
Электродвигатели переменного тока широко используются как в промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в быту (экскаваторы и шлифовальные машины, циркулярные пилы).
Принцип работы трехфазных асинхронных двигателей
Мы уже знакомы с электроникой асинхронных двигателей, поэтому не будем повторять эту характеристику еще раз. Желающие могут перейти по ссылке, чтобы узнать больше.
При подключении асинхронного двигателя к сети обмотки двигателя должны быть соединены звездой или треугольником. Если клеммы на клеммной коробке не обозначены, вы должны самостоятельно определить начало и конец обмотки двигателя.
При подключении обмотки статора асинхронного двигателя к трехфазному источнику переменного тока образуется вращающееся магнитное поле статора со скоростью вращения n1. Скорость вращения определяется следующим уравнением
Это вращающееся магнитное поле в статоре пронизывает обмотки статора и ротора и индуцирует в них ВЭД (E1 и E2). Самовозбуждающийся индуктор (E1) индуктируется в обмотке статора в направлении, противоположном приложенному сетевому напряжению, и ограничивает величину тока в обмотке статора.
Как известно, ток в обмотке статора индуцируется от АЦП ротора (E2), поскольку обмотка ротора замыкается накоротко в случае двигателей с короткозамкнутым ротором и через резистор в случае двигателей с фазным ротором. Взаимодействие между индуктированным током в катушке ротора и вращающимся магнитным полем статора создает электромагнитную силу Fem.
Направление электромагнитной силы в Fem можно легко найти, используя правило левой руки.
Правило левой руки для определения направления электромагнитной силы
Следующая схема иллюстрирует принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в данный период называются N1 и S1. В этом случае эти полюса вращаются против часовой стрелки. А в другое время они будут находиться в разных пространственных положениях. Это означает, что время зафиксировано и отображается следующее изображение.
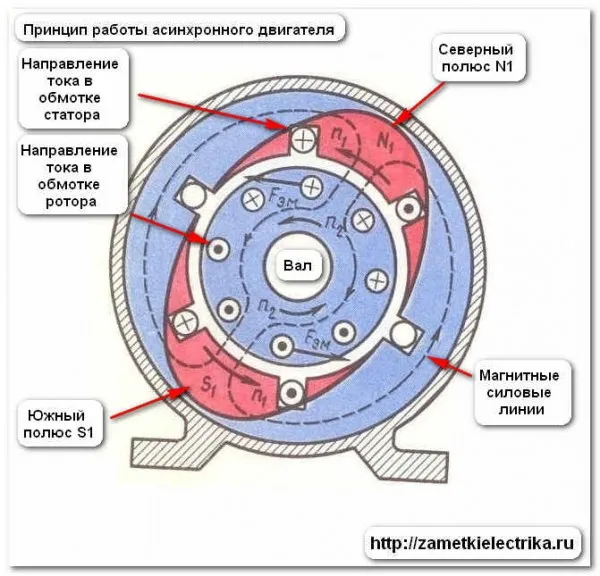
Токи в обмотках статора и ротора представлены крестиками и точками. Позвольте мне объяснить. Если есть крест, это означает, что ток в этой обмотке направлен нами. И наоборот, если есть точка, это означает, что ток в этой обмотке направлен нами. Пунктирной линией показаны линии магнитного поля вращающегося магнитного поля статора.
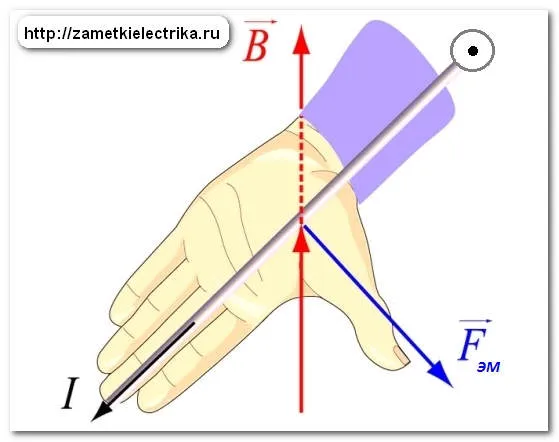
Поместите ладонь так, чтобы линии магнитного поля находились на вашей ладони. Четыре вытянутых пальца должны вести вдоль направления тока обмотки. Выдвинутый большой палец указывает направление электромагнитной силы Fem для конкретного токопровода.
На этой диаграмме показаны только две силы Fem, создаваемые проводником ротора в направлении тока от нас (X) и к нам (Dot). И, как мы видим, электромагнитные силы Fem пытаются повернуть ротор в сторону вращающегося магнитного поля статора.
Иллюстрация для определения электромагнитной силы Fem проводника с током, направленным от нас (X).
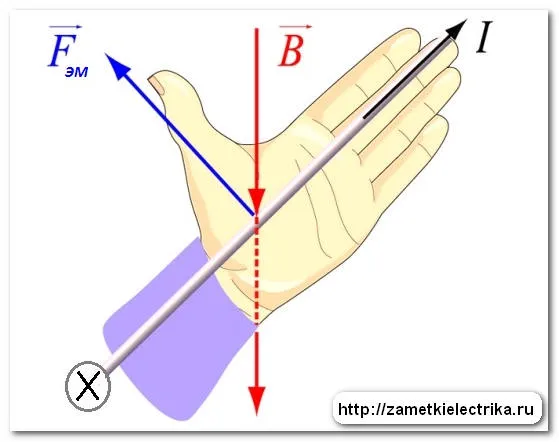
Иллюстрация для определения электромагнитной силы Fem токоведущего проводника (точка).
Сумма этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент M, который перемещает вал электродвигателя с частотой n.
Отсюда и название — асинхронный двигатель. Частота n ротора всегда ниже частоты вращения магнитного поля статора n1. Другими словами, он отстает. Термин «проскальзывание» введен для описания времени запаздывания, которое рассчитывается по следующему уравнению

Пример расчета оборотов двигателя.
Например, имеется двигатель AIR71A4U2 мощностью 0,55 (кВт).
- Число пар полюсов равно 4 (2p = 4, p = 2)
- Скорость вращения ротора составляет 1360 (об/мин)
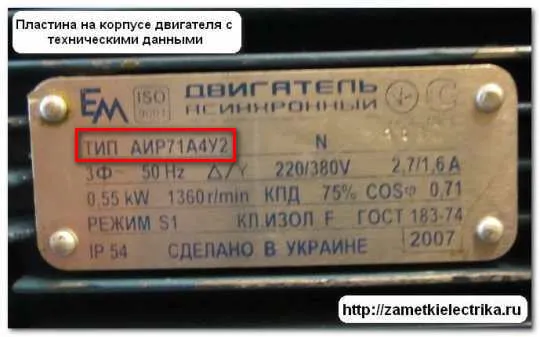
Найдите скорость вращения поля статора этого двигателя при частоте сети 50 (Гц).

Найдите размер скольжения этого двигателя:.

Кстати, направление вращения поля статора и, следовательно, вала двигателя может быть обратным. Это делается путем переключения двух любых проводников трехфазного питающего напряжения. Это объясняется в статье о реверсе двигателя и чередовании фаз.
Шкальное управление просто и дешево в реализации, но имеет недостатки в виде медленной реакции на изменение нагрузки и узкого диапазона регулирования. Поэтому ступенчатое управление обычно используется в тех случаях, когда нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентилятором).
Отличие от синхронного двигателя
Наряду с простыми асинхронными машинами в промышленности используются и современные машины. Основным отличием современных двигателей является наличие вспомогательной обмотки в роторе для создания стабильного магнитного потока, как показано на рисунке 4 ниже.
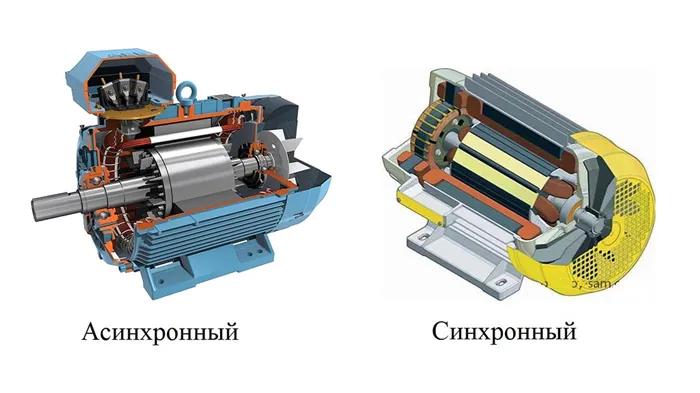
Рис. 4.Различия между асинхронными и синхронными двигателями
Эта обмотка создает магнитный поток, который не зависит от движущей силы обмотки статора электродвигателя. Поэтому, когда синхронный двигатель возбуждается, его вал начинает вращаться одновременно с полем статора. В отличие от асинхронной формулы, где есть разница в движении, это естественно выражается как скольжение и рассчитывается по следующему уравнению
где s — величина скольжения, измеренная в процентах n.1 частота, на которой вращается поле статора, n2 — частота, с которой вращается ротор.
Современные двигатели используются в приложениях, где важно поддерживать высокую степень синхронизации между подачей питания и запуском привода. Он также обеспечивает сохранение рабочих характеристик во время запуска.
На практике, согласно ГОСТ 12139-84, существуют различные типы асинхронных электродвигателей, которые отличаются как по сфере применения, так и по мощности. Поскольку перечислить все варианты невозможно, рассмотрены наиболее важные критерии для классификации асинхронных машин на типы.
В зависимости от количества фаз питания различают следующие виды фаз
- Трехфазные — используются в сетях, где все фазы могут быть подключены одновременно, но в некоторых случаях могут работать и в однофазных сетях.
- Двухфазный — используется во многих приборах и состоит из двух рабочих обмоток, одна из которых приводится в действие сетевым напряжением, а другая подключается через фазосдвигающий конденсатор.
- Однофазные — ранние модели содержали две обмотки, одна из которых работает, а две запущены.
В зависимости от типа ротора они различаются:.
- Использование ротора с короткозамкнутым ротором — не только большее время запуска, но и меньшая стоимость.
- Используйте роторы с фазной обмоткой — ротор оснащен вспомогательной обмоткой, что делает работу электродвигателя более плавной.
В зависимости от способа подачи питания:.
- Статор — классические модели, в которых рабочая обмотка крепится к статору.
- Ротор — рабочая обмотка расположена на вращающемся элементе, на практике широко используются асинхронные двигатели Шлагериха.
Способы пуска и схемы подключения
Асинхронные двигатели с короткозамкнутым ротором имеют более низкую стоимость, более высокие пусковые токи и меньшие пусковые усилия. Поэтому различные методы запуска могут быть использованы для разных целей. Это уменьшает бросок тока в обмотках и улучшает рабочие характеристики.
- Прямой — напряжение подается на электродвигатель через пускатель или контактор.
- Переключение цепи соединения обмоток электродвигателя со звезды на треугольник.
- Снижение напряжения ;
- Мягкий старт ;
- Изменение частоты напряжения питания.
Однофазные асинхронные двигатели.
Для однофазных асинхронных электродвигателей можно использовать три основных метода запуска
Трехфазные асинхронные двигатели.
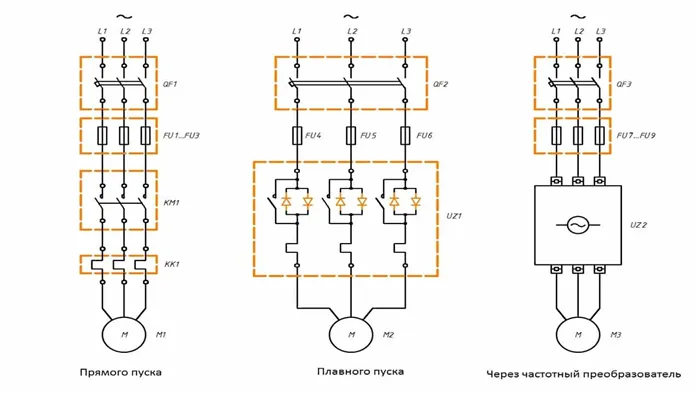
Трехфазные индукционные агрегаты могут быть подключены этими методами.
- непосредственно в цепь через пускатель или контактор. Это обеспечивает простой процесс, но дает максимальный ток. Этот метод не подходит для высоких механических нагрузок на вал.
- Переключение цепи со звезды на треугольник — используется для уменьшения тока в обмотках двигателя путем снижения напряжения питания от линии к фазе.
- Подключение через преобразователь напряжения, реостат или автоматический трансформатор для уменьшения разности потенциалов. Также используются число пар полюсов и частота питающего напряжения.
Кроме того, трехфазные асинхронные двигатели могут использовать прямые и реверсивные схемы. Первый вариант используется только для вращения вала двигателя в одном направлении. Реверсивная схема позволяет переключаться между прямым и обратным движением рабочего органа.
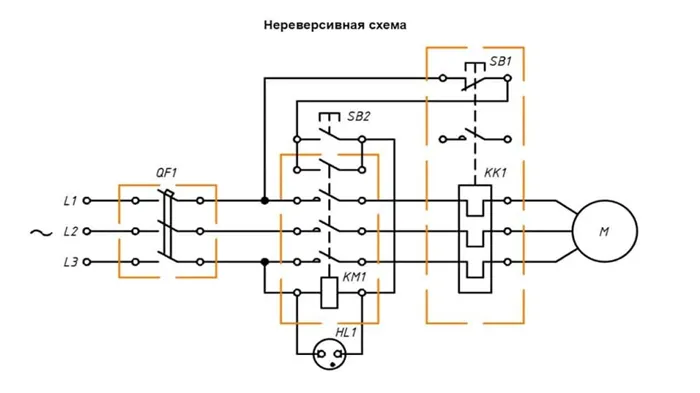
Рис. 9: Движение вперед без реверса
Рассмотрим нереверсивную схему запуска асинхронного электродвигателя (рис. 9). Здесь трехполюсный автоматический выключатель QF1 подает питание на стартер KM1. При нажатии кнопки SB2 подает напряжение на обмотки двигателя, а его отключение производится кнопкой SB1. Тепловое реле KK1 используется для контроля температуры нагрева, а лампочка HL1 сигнализирует о состоянии контактора.
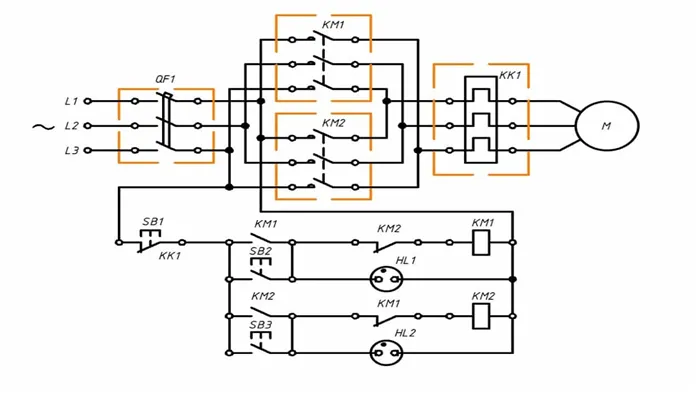
Рис. 10: Инвертированная схема прямого включения
Инвертированная схема (см. рис. 10) устроена аналогично, но в ней используются два пускателя KM1 и KM2. Прямое подключение асинхронного электродвигателя создается кнопкой SB2, а реверсивное подключение SB3.
Применение
Сфера применения асинхронных двигателей охватывает достаточно большой сегмент экономической деятельности человека. Поэтому они встречаются в работе грузоподъемных кранов, талей, теллеров и других механизмов, во вращении, шлифовании, фрезеровании, прокатке и многих других видах механического оборудования.
Они используются в лифтах, горных машинах, землеройном оборудовании, эскалаторах и конвейерах. В домашних условиях они устанавливаются в вентиляторах, электронных диапазонах, хлебопекарных печах и другом вспомогательном оборудовании. Такая популярность асинхронных двигателей обусловлена их важными преимуществами.
Если статор имеет шесть полюсов, то он работает в три раза медленнее, чем предыдущий статор (1000 об/мин при постоянной частоте 50 Гц). Шестиполюсный статор с одним кабелем на полюс и одним кабелем на фазу показан на рис. 1d.
Принцип работы
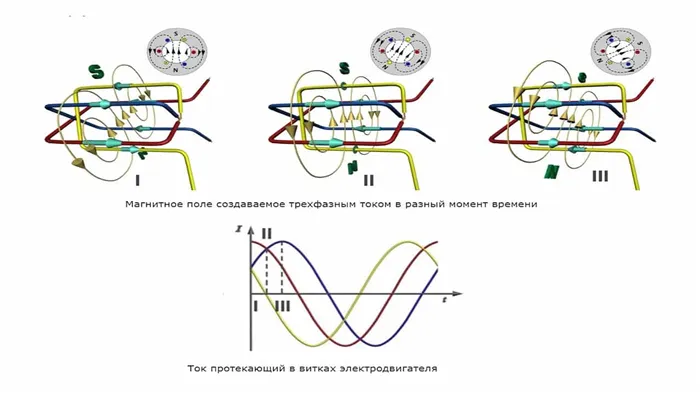
Принцип работы двухфазных и полифазных двигателей был разработан и запатентован Николой Тесла. Доливо-Добровольский усовершенствовал конструкцию электродвигателя и предложил использовать три фазы вместо двух, применяемых Н. Тесла.

Это улучшение основано на том, что сумма двух синусоидальных волн одинаковой частоты с разными фазами дает синусоидальную волну. Это позволяет использовать три провода (с четвертым «нулевым» кабелем, нулевым током) в одной трехфазной системе, в отличие от четырех кабелей, необходимых в системе с двухфазным током.
Сумма моментов, создаваемых отдельными кабелями, образует результирующий момент двигателя — пару электромагнитных сил, которые стремятся вращать ротор в направлении движения электромагнитного поля статора.
Ротор вращается с определенной скоростью, а магнитное поле и ротор вращаются с разными скоростями или асинхронно. В асинхронном двигателе скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Крутящий момент двигателя создается силой взаимодействия между магнитным полем и токами, вызванными им в роторе, причем сила этих токов определяется относительной скоростью магнитного поля по отношению к ротору, вращающемуся в том же направлении, что и поле.
Таким образом, если ротор вращается с той же частотой, что и поле, то относительного движения между ними нет. Затем ротор оседает против поля, и наведенное электростатическое напряжение отсутствует. Это означает, что через ротор не протекает ток и не создается сила, способная вращать ротор. Поэтому ясно, что двигатели описанного типа могут работать только при частоте вращения поля, т.е. при частоте вращения ротора, которая незначительно отличается от частоты тока.
Поэтому такие двигатели в технике принято называть «асинхронными» (от греческого «synchronous» — согласование или координация времени, числитель «a» означает отрицание). Если электродвигателю требуется другая скорость, чем самому двигателю, следует использовать другое соотношение шестерен или ремней.
Само собой разумеется, что при увеличении нагрузки двигателя, т.е. при увеличении механической мощности двигателя, ток статора, а также ток ротора должны увеличиваться, чтобы двигатель мог поглощать соответствующую мощность из сети. Поэтому при эксплуатации двигателей необходимо строго соблюдать следующие правила
- Двигатели всегда должны быть рассчитаны в соответствии с мощностью, необходимой для фактически работающего двигателя.
- Если нагрузка двигателя составляет менее 40% от нормальной нагрузки и обмотки статора соединены в треугольник, рекомендуется перейти на соединение звездой.
- Чтобы изменить направление вращения вала двигателя, необходимо поменять местами два сетевых кабеля, подключенных к двигателю. Это можно легко сделать с помощью биполярного переключателя.
Это происходит автоматически из-за того, что ток в курсоре генерирует собственное магнитное поле в окружающем пространстве, воздействуя на старые обмотки и вызывая в них некоторую электрическую тенденцию. Взаимосвязь между курсором и магнитными токами статора, или «реакция на усиление», как говорят, управляет изменениями токов статора и гарантирует, что мощность, получаемая из сети, соответствует механической мощности, обеспечиваемой двигателем.
Изменение частоты вращения ротора
Параллельные двухфазные обмотки образуют пары полюсов 120°. Обмотки соединены в ряд, образуя две пары полюсов, что позволяет снизить скорость вращения в два раза. Скорость вращения ротора регулируется путем изменения частоты тока с помощью отдельных источников тока или тиристорных преобразователей частоты.
Поскольку при запуске двигатель развивает очень значительный крутящий момент, а время его бездействия относительно невелико, скорость курсора быстро возрастает и почти равна скорости поля, поэтому относительная частота почти равна нулю, а ток курсора быстро уменьшается.
Для двигателей малой и средней мощности кратковременная перегрузка при запуске не опасна, но для очень мощных двигателей (десятки киловатт) используются специальные буттеры, которые гасят ток обмотки по мере достижения нормальной скорости. Эти люйметры постепенно и постепенно выводятся из строя.
При увеличении нагрузки на двигатель скорость курсора немного уменьшается, скорость курсорного поля увеличивается, одновременно увеличивается ток в бегунке и крутящий момент, создаваемый двигателем.
Однако для изменения мощности двигателя от нуля до нормы требуется очень небольшое изменение скорости курсора, максимум до 6% от максимального значения. Таким образом, асинхронные трехфазные двигатели поддерживают почти постоянную скорость вращения ротора при очень больших изменениях нагрузки.
В принципе, можно регулировать эту скорость, но соответствующие устройства сложны и нерентабельны и поэтому редко используются на практике. Если к моторной машине предъявляются требования по скорости, отличные от скорости самого двигателя, предпочтительнее использовать зубчатые передачи или ремни с разным процентным соотношением.
Способы торможения двигателей
Противоположное торможение изменяет два провода, соединяющие трехфазные сети с обмотками статора, тем самым изменяя направление магнитного поля машины. В результате образуется электромагнитный тормоз. В случае динамического торможения обмотка статора отключается от трехфазной сети и подключается к сети постоянного тока. Старое постоянное поле немедленно останавливает курсор.
Чтобы лучше понять механизм торможения двигателя, рекомендуем прочитать далее обо всем, что нужно знать о ступенчатых двигателях.
После отключения от сети двигатель продолжает двигаться из-за бездействия. Кинетическая энергия используется для преодоления сопротивления движению. Поэтому после периода, когда кинетическая энергия была израсходована, скорость двигателя будет равна нулю.
Такое прекращение работы двигателя во время бездействия называется свободным торможением. Многие электрические двигатели, работающие длительное время или с большой нагрузкой, останавливаются с помощью свободного торможения.
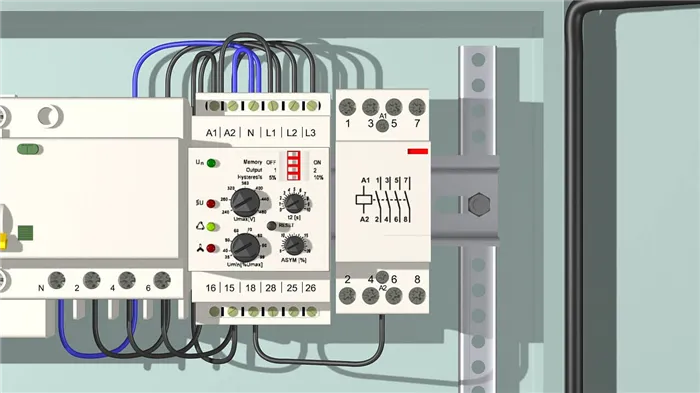

Потеря фазы и перекос фаз используются (с помощью автоматического или ручного сброса) для защиты двигателя и полного отключения питания в таких случаях. Реле могут быть установлены для каждой группы двигателей.
Более базовая и гибкая защита является обязательной в соответствии с правилами эксплуатации и обычно устанавливает мощность на длительные периоды времени (до нескольких минут) из-за перегрузки двигателя, перекоса фаз или обрыва фазы, если она имеет достаточные размеры.
Само собой разумеется, что при увеличении нагрузки двигателя, т.е. при увеличении механической мощности двигателя, ток статора, а также ток ротора должны увеличиваться, чтобы двигатель мог поглощать соответствующую мощность из сети. Поэтому при эксплуатации двигателей необходимо строго соблюдать следующие правила
Управление асинхронным двигателем
-
Способы подключения асинхронного электродвигателя к сети питания:
- Ссылка с устройства плавного пуска
Немедленное подключение к сети
Магнитные пускатели могут использоваться для управления асинхронными двигателями с двигателями в сети переменного тока.
Магнитные пускатели можно использовать для реализации схем.
Тепловые реле могут использоваться для защиты двигателя от токов, значительно превышающих его номинальное значение.
Нереверсивные схемы
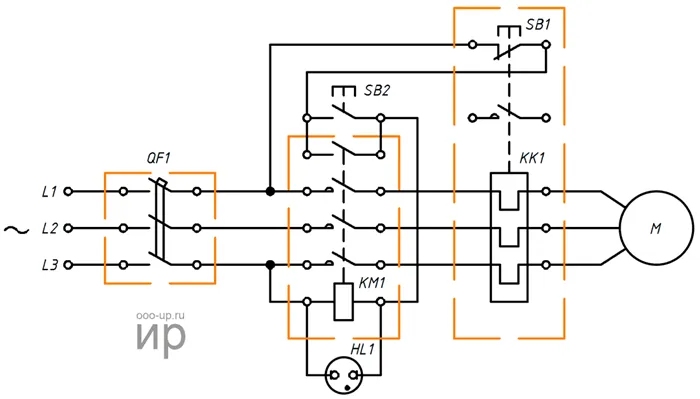
Схема подключения трехфазного асинхронного электродвигателя к трехфазному переменному току через магнитные пускатели L1, L2 и L3 — контактная сеть 3-фазного переменного тока, QF1 — выключатель питания, SB1 — кнопка SP2, SB2, KK1 — тепловое реле, HL1 — сигнальная лампа, M — трехфазный асинхронный двигатель
Реверсивная электрическая схема
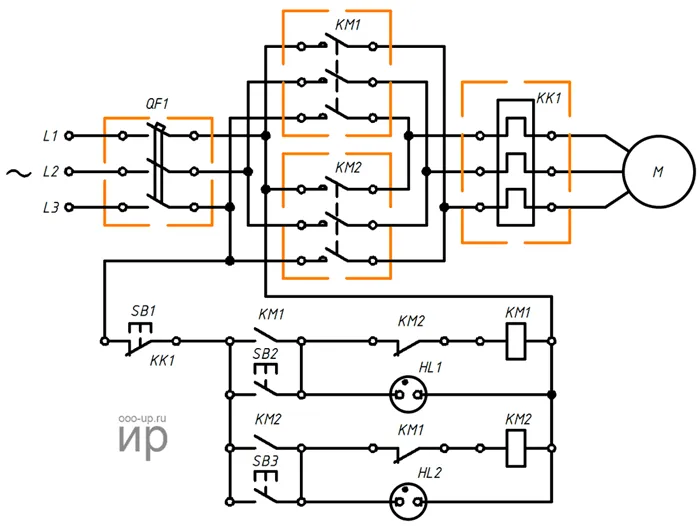
Схема реверсивных соединений для подключения трехфазных асинхронных двигателей к трехфазному переменному току через магнитные пускатели L1, L2, L3 — контакт 3 фазы переменного тока, QF1 — выключатель питания, km1, km2 m — асинхронный двигатель, подключаемый к трем фазам, SB1 — кнопка настройки, SB2 — фронт — вперед, SB3 — Задняя кнопка сзади, HL1, HL2 — индикаторные лампы
Недостатком движения асинхронных электрических кругов непосредственно по сети является наличие высокого тока загрузки при запуске электродвигателя.
Устройства плавного пуска для асинхронных двигателей
В тех случаях, когда не требуется регулировка оборотов двигателя, для снижения тока загрузки используются плавные пускатели.
Пускатели плавного пуска защищают асинхронные электродвигатели от повреждений, вызванных внезапным увеличением потребления энергии при пуске, и ограничивают пусковой ток. Плавные пускатели обеспечивают плавное ускорение и замедление асинхронного электродвигателя.
Устройства плавного пуска дешевле и компактнее, чем преобразователи частоты. Они используются, когда нарушения скорости и регулировка крутящего момента требуются только при запуске.
Частотное управление асинхронными двигателями
Частотные преобразователи используются для управления скоростью и крутящим моментом асинхронных двигателей. Принцип работы преобразователей частоты основан на изменении частоты и напряжения переменного тока.
-
Использование частотного преобразователя позволяет:
- Преобразователи частоты предназначены для снижения энергопотребления двигателя.
- Управление скоростью двигателя (плавный пуск и остановка, регулировка скорости во время работы); и
- Предотвращение перегрузок двигателя и продление срока службы.
-
В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем: ; .
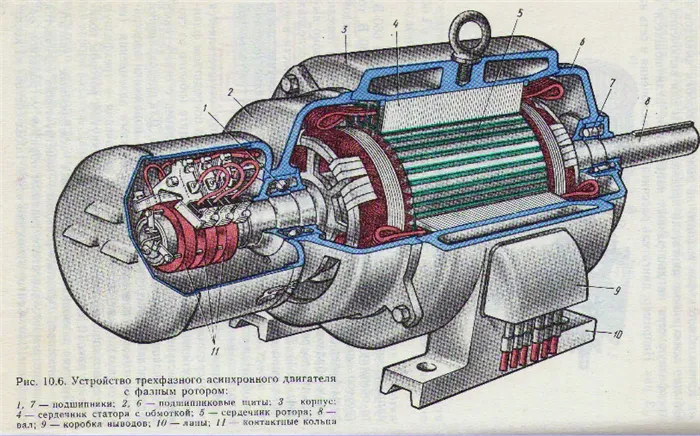
Трехфазный асинхронный двигатель с фазным ротором
Асинхронные двигатели с фазным ротором — это асинхронные двигатели, обмотки ротора которых соединены с контактным кольцом1.
До широкого применения преобразователей частоты асинхронные двигатели средней и большой мощности изготавливались с использованием фазовращателей. Трехфазные асинхронные двигатели (ADFM) обычно используются для тяжелых условий пуска. В качестве крановых двигателей переменного тока или для привода устройств, требующих бесфазного регулирования скорости.
Проектирование АДФР
Фаза ротора
Фазный ротор по сути представляет собой трехфазную обмотку (аналогично обмотке статора), которая вставляется в гнездо в сердечнике ротора. Фазные концы этой обмотки ротора обычно соединены звездой, а пусковые концы соединены контактными кольцами, изолированными друг от друга и от вала. Трехфазный пусковой или регулирующий штекер обычно подключается к контактным щеткам. Асинхронные двигатели с фазным приводом имеют лучшие характеристики запуска и управления, но они сложнее, чем короткозамкнутые двигатели.
Statis ADFR.
Статор короткозамкнутого асинхронного двигателя идентичен статору короткозамкнутого асинхронного двигателя.
Определение выводов вспомогательной обмотки трехфазного АДСР
| Схема подключения обмоток, наименование фаз и выходов | Название розетки | |
|---|---|---|
| Inception | Конец. | |
| Разомкнутая цепь (6 проводников) | ||
| Фаза 1 | K1 | K2 |
| Фаза 2 | L1 | L2 |
| Фаза 3 | M1 | M2 |
| Соединение звездой (количество проводников 3 или 4) | ||
| Фаза 1 | K | |
| Фаза 2 | L | |
| Фаза 3 | M | |
| Starpoint (нулевая точка) | Q | |
| Дельта-соединение (3 воздуховода) | ||
| Первая зацепка | K | |
| Второй выход | L | |
| Третий ведущий | M | |
Наименования выводов обмотки ротора трехфазных машин, ранее разработанных и модернизированных в соответствии с ГОСТ 26772-85
| Схема подключения обмоток, наименование фаз и выходов | Название розетки | |
|---|---|---|
| Соединение звездой (количество проводников 3 или 4) | ||
| Фаза 1 | P1 | |
| Фаза 2 | P2 | |
| Фаза 3 | P3 | |
| Нулевая точка | 0 | |
| Дельта-подключение (количество воздуховодов 3) | ||
| Первая зацепка | P1 | |
| Второй выход | P2 | |
| Третий ведущий | P3 | |
Трехфазные асинхронные двигатели могут быть подключены к однофазным сетям с помощью фазосдвигающих элементов. Двигатель может работать как однофазный двигатель с пусковой обмоткой (рис. a, b и d) или как конденсаторный двигатель с постоянным рабочим конденсатором (рис. c, e и f).
Схемы подключения
Для подключения трехфазных асинхронных двигателей используются различные схемы, наиболее распространенные из которых — треугольник и звезда.
Треугольник.
Преимущество этой схемы заключается в том, что при подключении по ней трехфазного двигателя можно получить максимальную мощность. Для этого обмотки соединяются в сквозное соединение. На принципиальной схеме это выглядит как треугольник, но не всегда удобно понимать его содержимое. Поэтому рекомендуется проанализировать приведенный ниже график, а затем общую картину (ниже).
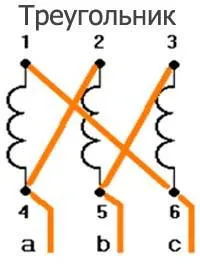
В трехфазной сети линейное напряжение между проводниками обмотки составляет 380 В. В этом случае нет необходимости создавать операционный ноль. Важно отметить, что в таких цепях могут возникать высокие пусковые токи, и проводка может быть значительно перегружена.
Звезда.
Этот способ подключения наиболее часто используется в сетях с трехфазным током 380 В. Название схемы связано с тем, что концы обмоток соединены в определенной точке, подобно лучу звезды. Начало обмотки подключается путем переключения оборудования к фазному проводу. В такой линейной конструкции напряжение между пуском составляет 380 В, а напряжение между точкой соединения и соединением проводников — 200 В.
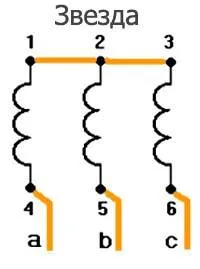
Трехфазный двигатель в сети 380 В, подключенный таким образом, не может развивать максимальную мощность из-за того, что напряжение в каждой обмотке составляет 220 В. Эта схема предотвращает развитие сверхтоков и плавный пуск.
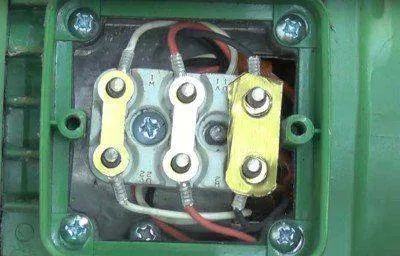
Возможность подключения двигателя тем или иным способом обычно указывается на его заводской табличке. Y означает «звезда», а ∆ — «дельта». Цепь уже подключенной машины можно определить по типу обмотки — если используется одна двойная перемычка между ними «звезда» (первый рисунок ниже), если между клеммами обмотки появляются три перемычки — «треугольник» (первый рисунок выше).

Если необходимо запустить трехфазный асинхронный двигатель в противоположном направлении вращения, необходимо заменить два питающих провода от трехфазного источника.
Функциональные и эксплуатационные особенности
Отличительные преимущества асинхронных двигателей:.
- В их конструкции отсутствует коллекторная группа, что увеличивает износ двигателя других типов из-за дополнительного трения.
- Асинхронные электрические машины не требуют использования преобразователей и могут питаться от промышленных 3-фазных сетей.
- Благодаря небольшому количеству деталей и конструктивных элементов, они относительно просты в обслуживании и имеют длительный срок службы.
К недостаткам можно отнести следующее.
- Область применения асинхронных двигателей несколько ограничена из-за малого пускового момента.
- Высокая реактивная мощность, потребляемая во время работы, не влияет на механическую мощность.
- Высокий пусковой ток, потребляемый при запуске этих двигателей, может превышать допустимые значения для некоторых систем.
Как производятся расчеты
Для расчета скорости двигателя необходимо использовать ранее определенное уравнение скольжения.
Это выражает скорость вращения ротора.
В качестве примера возьмем двигатель модели AIR71A4U2 мощностью 550 Вт с 4-полюсной парой и скоростью вращения ротора 1360 об/мин.
При питании от электросети с частотой 50 Гц статор вращается со скоростью.
Отсюда следует величина скольжения электродвигателя.
Наконец, отличное, устаревшее видео, рекомендуемое всем для одноразового просмотра.
На этой диаграмме показаны только две силы Fem, создаваемые проводником ротора в направлении тока от нас (X) и к нам (Dot). И, как мы видим, электромагнитные силы Fem пытаются повернуть ротор в сторону вращающегося магнитного поля статора.
Подключение однофазных асинхронных двигателей
Другим типом асинхронной электрической машины является однофазный двигатель переменного тока. Эти двигатели имеют только две обмотки и только одна функционирует после запуска. Такие двигатели имеют несколько функций, о которых пойдет речь.
Такие агрегаты также называют электродвигателями с расщепленной фазой. Их статоры имеют обмотку со смещением (по сравнению с основной обмоткой) — это вспомогательная обмотка. Фазосдвигающий конденсатор помогает запустить машину.
Очень важно обращать внимание на заводскую табличку на машине. Даже если показаны три кабеля, это не означает, что двигатель может питаться напряжением 380 В. Существует риск сжигания обмоток, что является основным недостатком этих двигателей.
Подключение однофазных двигателей к электросети
Первым шагом является нахождение центра катушки, который является точкой подключения. Это легко определить по цвету кабеля.
Если все концы правильно заделаны, проблем с подключением быть не должно. Если нет, то все немного сложнее.
Проверьте концы катушек с помощью измерителя сопротивления. Наибольшее значение сопротивления указывает на то, что две катушки соединены последовательно. Они должны быть выделены каким-либо образом. Следуйте дальше по счетчику. Входная катушка в хорошем состоянии всегда имеет большее сопротивление, чем катушка в рабочем состоянии. Затем подключите конденсатор.
Теперь вы можете подключить однофазный двигатель.
Преимущества и недостатки асинхронного двигателя
Уже много раз говорилось, что асинхронные двигатели являются наиболее распространенным типом электродвигателей на заводах. Асинхронные агрегаты составляют 95% всех современных двигателей, остальные пять состоят из пяти и более различных типов электродвигателей. Каковы плюсы и минусы оборудования? Почему он так популярен?
- Во многих случаях выбор асинхронного двигателя обусловлен простотой конструкции — это его главное преимущество. Это объясняется не только трехфазным питанием, но и принципом работы машины. При этом еще одной положительной особенностью электродвигателей является их низкая цена. Из всех типов двигателей этот является самым экономичным.
- Для создания вращающегося магнитного поля в трехфазном электродвигателе не требуется никаких дополнительных компонентов или узлов. Сама машина предназначена для вращения поля статора, вокруг которого движется ротор. Просто подайте напряжение на контактор или стартер, и двигатель запустится.
- Асинхронные двигатели легко диагностировать и обслуживать, а эксплуатационные расходы на машину очень низкие. Если двигатель установлен правильно и эксплуатируется в соответствии с правилами, подшипники не следует заменять чаще, чем раз в 15 лет.
Отрицательные моменты в эксплуатации асинхронных двигателей
- Зависимость скорости вращения ротора от числа полюсов в обмотке статора и частоты питающей двигатель сети. Это может быть существенным недостатком, если работа связана с переключением передач. Чтобы избежать этих проблем, существуют асинхронные двухскоростные двигатели.
- Эффект скольжения. Ротор вращается с более низкой частотой, чем поле статора. Это начало работы машины. Проскальзывание по-прежнему зависит от нагрузки на вал. При необходимости это можно решить с помощью частотного преобразователя.
- Если в помещении влажно, этот тип двигателя может оказаться непригодным для использования. В помещениях с повышенной влажностью требования к электробезопасности обычно очень строгие. Кроме того, технические характеристики асинхронных двигателей, к сожалению, не позволяют эксплуатировать агрегат при напряжении ниже 220 В.
- Еще одним недостатком является то, что двигатели очень чувствительны к напряжению сети. Если электрическая система в месте использования нестабильна, машина может перегреться и изменить свои динамические характеристики, если напряжение выходит за пределы нормы.
- Высокие пусковые токи также являются серьезной проблемой. Пусковые токи могут в восемь раз превышать обычную цену. По этой причине не рекомендуется подключать мощные двигатели непосредственно к сети. Начальный ток. Высокие пусковые токи являются проблемой для асинхронных двигателей мощностью более 10 кВт. Пусковые токи могут в 5-8 раз превышать номинальный ток и длиться несколько секунд. Из-за этого негативного эффекта не подключайте двигатели большой мощности напрямую. Для двигателей с фазой ротора это не является проблемой.
Анализируя плюсы и минусы асинхронных двигателей, можно без преувеличения сказать, что плюсы использования этих машин значительно перевешивают минусы.







