
Часто владельцы считают, что на механический режущий стержень нужно нажимать громко. В противном случае они не будут функционировать должным образом. Это заблуждение, которое не применимо. Самое главное — это то, как пользователь правильно регулирует рабочие параметры.
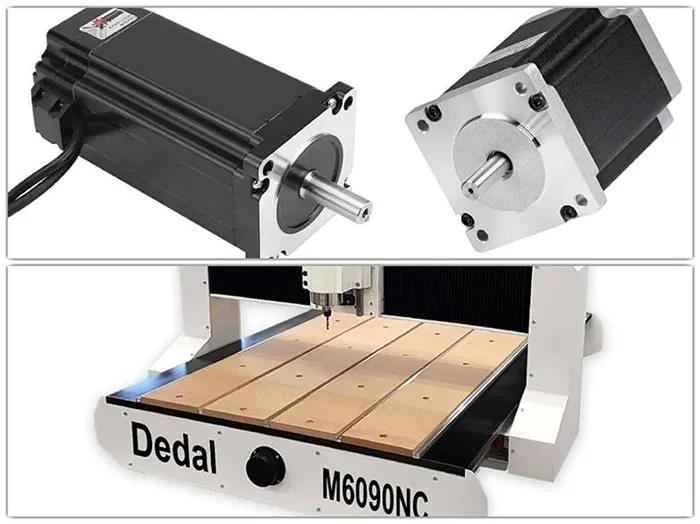
Шаговый двигатель для ЧПУ
Шаговые двигатели встречаются в автомобильных платах, принтерах, CD-блоках и электроинструментах. Как правило, требуется повышенная точность установки. Однако наиболее известным применением являются двигатели с ЧПУ.
Но почему его называют шаговым двигателем? Вкратце, это бесщеточный современный двигатель с большим количеством проволочных обмоток. Электричество направляется в одну из обмоток статора (неподвижные элементы), тем самым стабилизируя курсор (подвижные части) в определенном положении. Затем ток поступает на другие обмотки, и ротор совершает новое движение. Такое последовательное изменение положения называется «шагом». Именно за этот принцип работы шаговый двигатель и получил свое название.
Устройство и виды ШД
Сегодня существует три основных типа шаговых двигателей
- С переменным магнитным сопротивлением. Конструкция этих двигателей предполагает наличие множества полюсов в статическом элементе. Роторы этого типа двигателя имеют зубчатую форму, не изготовлены из жесткого материала и не намагничены. Если взять в качестве примера более старые, шестигранные, безвольные двигатели с четырьмя зубьями на бегунках, то число независимых кругов будет равно трем. Величина шага такого двигателя будет составлять 30 градусов.
- Двигатели с постоянными магнитами. Как можно заключить из названия, курсором такого двигателя является основной постоянный магнит бегунка. Полюса расположены параллельно оси двигателя и являются прямыми. Магнетизм ротора гарантирует более сильный магнитный поток. Поэтому крутящий момент в них выше, чем в двигателях с постоянными магнитами. Шаги в двигателях с постоянными магнитами обычно изменяются в пределах от 7,5 до 15 градусов. В зависимости от модели количество шагов на один оборот может составлять от 24 до 48.
- Пьяницы ступенчатого типа. В случае изобретения этих двигателей акцент был сделан на том, чтобы как можно эффективнее объединить в одном устройстве преимущества двух вышеупомянутых типов двигателей. Курсорные зубья гибридного двигателя установлены в осевом направлении. Это позволяет достичь более высоких скоростей, более низких шагов и более высокого крутящего момента. Большинство светодиодных гибридных ламп имеют от 100 до 400 шагов на оборот. В этом случае угол на шаг составляет всего от 0,9 до 3,6 градусов. Для уменьшения спазматических движений ротора используются специальные функции микрошагов. Наиболее распространенным представителем этого типа является двухполюсная ступень NEMA.
Следует отметить, что микрошаг возможен только при использовании гибридных шаговых двигателей. Каждый микрошаг выполняется с независимым управлением обмоткой. Управляя электрическим соотношением, ротор может также блокировать промежуточную область между двумя соседними уровнями. Это повышает плавность вращения подвижного элемента и обеспечивает оптимальную точность установки. Количество шагов в этом режиме может достигать 51 200 за один оборот.

Многие любители задаются вопросом, почему была выбрана именно такая форма зубцов ротора. Ответ прост. Это позволяет добиться циклической зависимости обмотки статора от углового положения ротора. Зазор между трещинами намного больше, чем зазор между зубами. Таким образом, проницаемость кариозных полостей ниже, чем удельная проницаемость зубов. В противном случае шаговый двигатель просто не будет работать. Очевидно, что именно сочетание всех конструктивных особенностей, формы и конфигурации элементов делает BF полноценным механизмом, а не просто куском металла.
Кроме того, в зависимости от типа обмотки, ДГ могут быть классифицированы следующим образом
- Биполярный. Для каждой фазы имеется своя обмотка. Направление их магнитного поля может быть изменено путем реверсирования поля с помощью биполярного полумостового или мостового направляющего устройства.
- Эксклюзив. Этот тип шагового двигателя также имеет по одной обмотке на фазу, но резка происходит от центра каждой обмотки. Это позволяет изменить направление поля на противоположное путем чередования половин используемых обмоток. Это проще, чем биполярные двигатели, так как для работы драйвера требуется всего четыре клавиши.
Характеристики ШД
В технической документации к шаговым двигателям перечислены следующие функции
- Крутящий момент или крутящий момент. Измеряется в килограммах — мощность на сантиметр. Этот элемент часто сопровождается графиком, показывающим зависимость между крутящим моментом и скоростью. Чем выше это значение, тем быстрее вращается двигатель при запуске.
- Удерживающий момент. Показывает количество энергии, которое статор может блокировать бегунок при работающем, но не запущенном двигателе. Другими словами, это параметр крутящего момента при нулевой скорости. Согласно графику, он уменьшается непосредственно с увеличением скорости. Она измеряется в унциях на дюйм. Момент удержания в диапазоне, указанном производителем, может отображаться только для двигателей в статическом режиме, если весь ток подается одновременно в двух фазах.
- Тормозной момент. Это величина силы, препятствующей вращению ротора при отсутствии тока. Другими словами, это сила, которая фиксирует ротор в выключенном состоянии. Его также называют удерживающим моментом. В гибридных редукторах он не превышает одной десятой крутящего момента, который препятствует вращению ротора при полной подаче тока. Эта характеристика измеряется в тех же единицах, что и момент удержания.
- Оцениваемая тенденция. Это значение напрямую зависит от индуктивности обмотки и позволяет определить оптимальное напряжение, подаваемое на двигатель. Оптимальное напряжение, подходящее для двигателя, составляет от 4 до 25 раз больше номинального напряжения. При превышении допустимого тока двигатель перегревается и разрушается. И если тренд недостаточен, он не запустится. Эта функция предоставляется в вольтах. Для расчета оптимального тока используется специальная формула U =32x√L. Где L — индуктивность обмотки, а U — желаемое значение.
- Кроме того, представлены результаты диэлектрического испытания. Это определяет максимальное напряжение, которое может выдержать обмотка в течение определенного периода времени. Это определяет, насколько долговечен двигатель и какую перегрузку он может выдержать.
- Момент инерции движущейся части двигателя. Это определяет скорость разгона двигателя. Эта величина измеряется в граммах на квадратный сантиметр.
- Количество шагов за оборот (учитываются только полные шаги, половинные шаги не учитываются). Чем больше ступеней, тем мощнее и быстрее двигатель.
- Длина и вес. Это длина корпуса, а не вала. «Вес», с другой стороны, указывает общий вес продукта. Размеры и вес зависят от условий применения, в которых может использоваться двигатель. В некоторых случаях требуется компактный двигатель, а в других случаях достаточно более мощного и крупного двигателя.
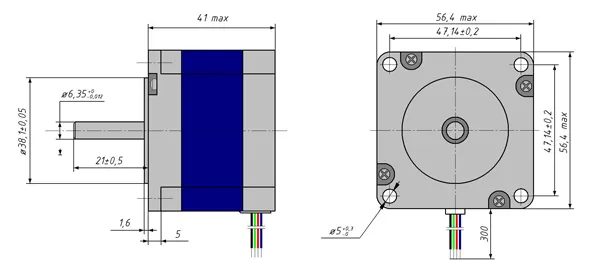
В качестве примера возьмем шаговый двигатель nema. Двигатель PL57H41, что означает ширина-высота (диаметр) в квадратном фланце 57мм — PL57. Длина двигателя без вала составляет 41 мм — H41. Крутящий момент двигателя, удерживающий и другие крутящие моменты в большей степени зависят от диаметра, чем от длины двигателя.
Характеристики PL57H110
| PL57H110 | L, мм | 131 | Индукция фазы, м рт.ст. | 6.0±20% |
| Угловой шаг, ° | 1.8±5% | Фазовое сопротивление, Ом | 1.0±10% | |
| Количество фаз | 2 | Усилие удержания, кг х см | 28 | |
| Сопротивление изоляции, Мом | 100 | Момент инерции, кг х см 2 | 405 | |
| Температура окружающей среды, °C | -20~40 | Масса, кг | 1.7 | |
| Рабочая температура, °C | 110 макс. | 軸 | 1 | |
| Фазный ток, A | 4 | タイプ | ||
| Радиальное скольжение вала двигателя (нагрузка 450 г) | Размер замка, мм |
При выборе обратите внимание на наличие индикатора OS. Это специальная серия, одобренная военными. Он имеет более высокое качество конструкции, чем обычные модели.
Какие шаговые двигатели нужны для ЧПУ-станка
Тип двигателя так же важен, как и его технические характеристики. Каждый тип имеет свои особенности.
- バイポーラ。 Они в основном используются в станках с ЧПУ. Главное преимущество разновидности — возможность установить новый драйвер в случае выхода из строя предыдущего. Даже при низких скоростях удельное сопротивление будет оставаться высоким.
- 3相。 Они характеризуются высокой скоростью. Скорость всегда стоит на первом месте в тех случаях, когда скорость имеет решающее значение.
- Монополь. К ним относятся различные биполярные версии. Двигатели отличаются друг от друга, и выбор делается в зависимости от типа обмотки.
Как подобрать шаговый двигатель для создания ЧПУ-станка своими руками?
Выбор оптимального двигателя основывается на различных параметрах.
誘導
Первый шаг — вычислить квадратный корень из индуктивности обмотки. Результат умножается на 32. Результат сравнивается с напряжением источника питания, питающего драйвер. Эти значения могут незначительно отличаться друг от друга.
Двигатель будет работать слишком громко и перегреется, если разница будет больше 30%.
Высокая индуктивность помогает поддерживать высокий крутящий момент. Для двигателя с высокой индуктивностью важно выбрать высоковольтный драйвер. Только в этом случае двигатель будет работать правильно.
Крутящий момент и скорость

Чтобы подобрать идеальный для вас двигатель, необходимо составить график скорости и крутящего момента (точнее, зависимости одного от другого). Предустановленный график показывает, подходит ли двигатель для конкретных рабочих характеристик.
Геометрические параметры
Рекомендуется проанализировать следующие параметры:
- Момент инерции роторов.
- Номинальный синфазный ток.
- Максимальное количество статических синхронизирующих моментов.
- Общие характеристики сопротивления фаз омического типа.
ВАЖНО: При выборе двигателя особое внимание следует обратить на фланец, диаметр вала и длину самого двигателя.
Расчет шаговых двигателей для ЧПУ
Определение силы
Чтобы определиться с выбором двигателя, необходимо рассчитать его шаговые параметры. Например, определите силу трения (она зависит от материалов, используемых в машине). Чтобы рассчитать силу трения, умножьте коэффициент трения на вес системы привода.
СОВЕТ! Для расчета инерции масса стола (рассчитанная вместе с заготовкой) умножается на требуемое значение ускорения.
Общая сила сопротивления рассчитывается следующим образом: сила резания, сила инерции и сила трения складываются вместе.
Расчет мощности
Мощность двигателя должна рассчитываться по следующей формуле: F = ma. В этой формуле F — сила (измеряется в Ньютонах), приложенная для приведения объекта в движение, m — масса объекта, a — желаемое ускорение.
Расчет снижения скорости вращения

Эта характеристика рассчитывается на основе начального вращения двигателя и максимальной скорости, с которой движется стол.
Например, скорость составляет 2000 мм/мин, а шаг передаточного винта — 20 мм. В этом случае снижение скорости составляет 100 (2000/20).
Особо популярны шаговые двигатели в конструкциях координаторных столов и станков ЧПУ. Благодаря низкой стоимости программного обеспечения, необходимого для их функционирования, ШД являются незаменимыми в производственном секторе, в панелях управления, программирования и постановки задач и в других элементах механизмов.
Униполярный шаговый двигатель может быть преобразован.
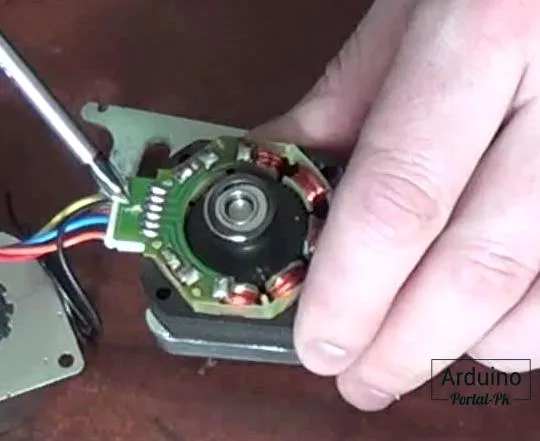
Для этого разберите шаговый двигатель и перережьте кабель, соединяющий центр обмоток. А при подключении общий кабель не нужно никуда подключать.
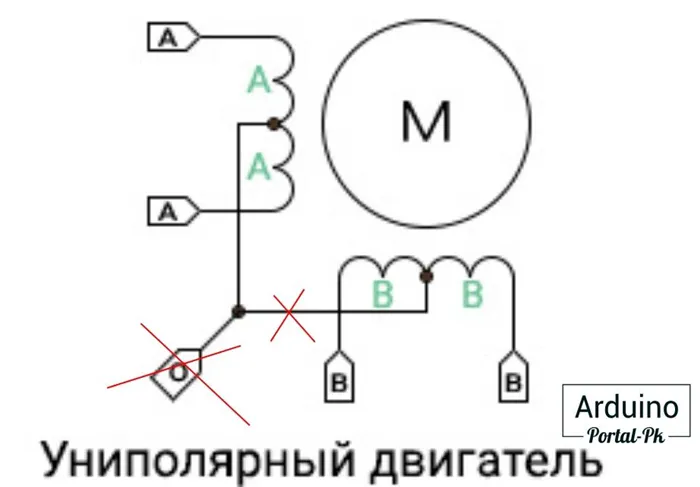
В результате мы имеем биполярный двигатель с 4 проводами.
Шаговые двигатели с 8 контактами могут быть подключены тремя способами.
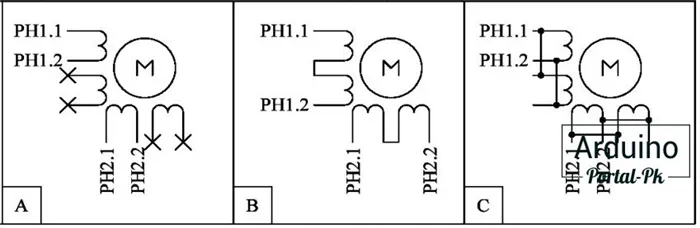
Подключение A — шаговый двигатель работает с характеристиками, указанными в описании (крутящий момент, ток), крутящий момент более стабилен на высоких частотах.
Соединение B — крутящий момент ↑1,4 раза, крутящий момент более стабилен на низких частотах (по сравнению с A).
Соединение C — крутящий момент ↑1,96 раз, крутящий момент более стабилен на высоких частотах (по сравнению с A).
Таким образом, мы решили проблему подключения шаговых двигателей. Но не все двигатели подойдут нам. Нам все еще необходимо определить рабочее напряжение двигателей. Самый верный способ — найти технический паспорт. Таким образом, все параметры будут доступны. Но не все двигатели в принтере могут быть зарегистрированы. В таких случаях я использую этот технический паспорт.
Я не знаю, правильна ли эта таблица, но она работает.
Я выбираю двигатели таким образом, чтобы их рабочее напряжение было меньше или равно напряжению питания. Для двигателей, рассчитанных на более низкое напряжение, мне нужно установить меньший ток.
Мы настроим щитNC в следующей статье. Не пропустите!
Подписывайтесь на мой канал на YouTube и вступайте в группы на Facebook и ВКонтакте.







